ASIP Design Methodologies : Survey and Issues
Manoj Kumar Jain, M. Balakrishnan, Anshul Kumar
Department of Computer Science and Engineering
Indian Institute of Technology, Delhi
{manoj,mbala,anshul}@cse.iitd.ernet.in
Abstract
Interest in synthesis of Application Specific Instruction Processors or ASIPs has increased considerably and a
number of methodologies have been proposed in the last decade. This paper attempts to survey the state of the art in
this area and identifies some issues which need to be addressed. We have identified the five key steps in ASIP design as
application analysis, architectural design space exploration, instruction set generation, code synthesis and hardware
synthesis. A broad classification of the approaches reported in the literature is done. The paper notes the need to
broaden the architectural space being explored and to tightly couple the various subtasks in ASIP synthesis.
1 Introduction
An Application Specific Instruction Processor (ASIP) is a processor designed for a particular application or for a
set of specific applications. An ASIP exploits special characteristics of application(s) to meet the desired performance,
cost and power requirements. ASIPs can be very efficient when applied to a specific application such as digital signal
processing, servo motor control, automatic control systems, avionics, cellular phones etc [35, 5].
According to Liem et al [31], ASIPs are a balance between two extremes : ASICs and general programmable
processors. ASIPs offer the availability of custom sections for time critical tasks (e.g. a Multiply-Adder for real time
DSP), and offer flexibility through an instruction-set. Hoon et al [15] observed that for the complex applications more
flexibility is required to accommodate design errors and specification changes, which may happen at the later design
stages. Since an ASIC is specially designed for one behavior, it is difficult to make any changes at a later stage. In
such a situation, the ASIPs offer the required flexibility at lower cost than general programmable processors.
There are several issues in the ASIP design process. Some are already addressed by various reserchers and
some more to be addressed. Integrated work is done rarely. Important steps involved in the ASIP design process are
identified. We attempted to classify the approaches on the basis of technique used for different steps. In this paper we
present a survey of work done on ASIP design. Approaches employed for each major step is classified and important
contributions are highlighted.
In section 2 we have described the steps involved in the ASIP design process, whereas, in section 3 we have dis-
cussed the approaches to application analysis which is crucial for synthesizing a suitable ASIP architecture. Sections
4 and 5 describe the various techniques to architectural exploration and instructionset generation respectively. Section
6 describes and classifies the approaches to code generation, and finally, section 7 presents the conclusion and future
work.

Application Analysis
Architectural Design
Space Exploration
Instruction Set
Code
Hardware
Synthesis
Code
Synthesis
Object Code
Design Constraints
Application(s) and
Generation
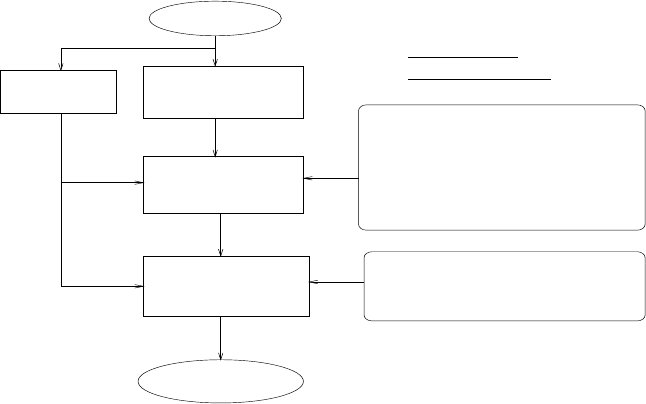
Figure 1: Flow diagram of ASIP design methodology
2 Steps in ASIP Synthesis
Gloria et al [10] defined some main requirements of the design of application-specific architectures. Important
among these are as follows.
Design starts with the application behavior.
Evaluate several architectural options.
Identify hardware functionalities to speed up the application.
Introduce hardware resources for frequently used operations only if it can be supported during compilation.
Various methodologies have been reported to meet these requirements. We have studied these methodologies
and found that typically there are five main steps followed in the synthesis of ASIPs. The steps are shown in fig. 1.
1. Application Analysis : Input in the ASIP design process is an application or a set of applications, along with
their test data and design constraints. It is essential to analyze the application to get the desired characteristics/
requirements which can guide the hardware synthesis as well as instruction set generation. An application
written in a high level language is analyzed statically and dynamically and analyzed information is stored in
some suitable intermediate format, which is used in the subsequent steps.
2. Architectural Design Space Exploration : First a set of possible architectures is identified for a specific
application(s) using output of step 1 as well as the given design constraints. Performance of possible architec-
tures is estimated and suitable architectures satisfying performance and power constraints and having minimum
hardware cost is selected.
3. Instruction Set Generation : Instruction set is to be synthesized for that particular application, and for the
architecture selected. This instruction set is used during the code synthesis and hardware synthesis steps.
4. Code Synthesis : Compilergenerator or retargetable code generator is used to synthesize code for the particular
application or for a set of applications.
5. Hardware Synthesis : In this step the hardware is synthesized using the ASIP architectural template and
instruction set architecture starting from a description in VHDL/ VERLOG using standard tools.
Every methodologydoes not emphasize on all these steps. Some of them consider the processor micro-architecture
to be fixed while only synthesizing the instructionset within the flexibility provided by the microarchitecture, e.g. [11],
[15] and [29], while others consider the process of instruction set synthesis only after the parallelism and functionality
of the processor microarchitecture is finalized based on the application, e.g. [13], [17], [32] and [36].
3 Application Analysis
Typically ASIP design starts with analysis of the applications. These applications with their test data should be
analyzed statically and dynamically using some suitable profiler before proceeding further in the design process.
Sato et al [35] have developed an Application Program Analyzer (APA). The output of APA includes data types
and their access methods, execution counts of operators and functions etc used in application program, the frequency
of individual instructions and sequence of contiguous instructions.
The methodology suggested by Gupta et al [12] takes the application as well as the processor architecture as
inputs. Using SUIF as intermediate format, a number of application parameters are extracted. These include the
average basic block size, number of Multiply-Accumulate(MAC)operations, ratio of address computation instructions
to data computation instructions, ratio of input/output instructions to the total instructions, average number of cycles
between generation of a scalar and its consumption in the data flow graph etc. Similar analysis is performed in the
scheme reported by Ghazal et al [9].
Saghir et al [34] have shown that dynamic behavior of DSP kernels significantly differs from that of DSP appli-
cation programs. This implies that kernels should play a more significant role in DSP application analysis especially
for parameters related to operation concurrency.
4 Architectural Exploration
Figure 2 shows a typical architecture exploration block diagram. Inputs from the application analysis step are
used along with the range of architecture design space to select a suitable architecture(s). The selection process
typically can be viewed to consist of a search technique over the design space driven by a performance estimator. The
methodologies considered differ both in the range and nature of architecture design space as well as the estimation
techniques employed.
4.1 Architecture design space
Almost all the techniques suggested by various researchers emphasized the need for a good parameterized model
for the architecture. Different values can be assigned to parameters (of course keeping design constraints into consid-

architecture
for a specific
Performace Estimator
Input from
Application analysis
Selected
Architecture(s)
Architecture
Design Space
Search
Control
Figure 2: Block diagram of an architecture explorer
eration), which constitute the design space. So the size of the design space will depend on the number of parameters
and the range of values which can be assigned to these parameters.
The parameterized architecture model suggested by almost all the techniques includes the number of functional
units of different types. Gong et al [7] consider storage units and interconnect resources also in their architectural
model. Binh et al [2, 3] emphasize on incorporating pipelined functional units in the model. Kienhuis et al [19] put
available element types (like buffer, controller, router and functional unit) and their composition rules. Composition
rules generate alternative implementations of elements. All parameters together support a large design space.
Kin et al [20] consider issue width, number of branch units, number of memory units, the size of instruction
cache and size of data cache etc. in the model. Gupta et al [12] use a model which include parameters like number
of registers, number of operation slots in each instruction, concurrent load/store operations and latency of functional
units and operations. Ghazal [9] include optimizing features like addressing support, instruction packing, memory
pack/ unpack support, loop vectorization, complex arithmetic patterns such as dual multiply-accumulate, complex
multiplication etc in their architectural model. This results in a large design space. They have developed a retargetable
estimator which takes advantage of such an architecture model.
Architectures considered by different researchers also differ in terms of the instruction level parallelism they
support. For example [3] and [19] do not support instruction level parallelism, whereas [7] and [12] support VLIW
architecture and [9] and [20] support VLIW as well as super scalar architecture.
Most of these approaches consider only a flat memory. Only [20] addresses consideration of instruction and data
cache sizes during design space exploration, but the range of architectures explored is rather limited. Similarly no
approach considers flexibility in terms of number of stages in a pipeline, though a pipelined architecture is considered
in [3] and [10]. Table 1 compares various architecture models used in major approaches for design space exploration.

Approach Gloria Sato Gong Binh Kinhuis Kin Gupta Gazhal
Attribute [10] [35] [7] [2, 3] [19] [20] [12] [9]
Number of FUs of different
type
yes yes yes yes yes yes yes yes
Register organization yes yes yes yes
Storage units yes yes yes yes yes
Interconnect resources yes yes
Pipelining yes yes
Controller yes
Variable Issue-width yes
No. of branch units yes
Memory hierarchy yes yes
Instruction level parallelism VLIW no VLIW no no VLIW, Super-
scalar
VLIW VLIW, Super-
scalar
addressing support yes yes
memory pack/ unpack yes
Loop vectorization yes
Complex arith. patterns yes yes
Distinguishing Complexity
of FU uncon-
strained
Considered stor-
age units inter-
connect resources
Introduced
pipelining
Alternative im-
plementation of
elements considered
Considered
memory
hierarchy
Few optimiz-
ing features
considered
Optimizing
features
considered
Table 1: Comparison of various architecture models used for design space exploration
4.2 Performance Estimation
In the literature two major techniques have been used for performance estimation. They are scheduler based and
simulator based.
1. Scheduler based : In this type of approach the problem is formulated as a resource constrained scheduling
problem with the selected architecture components as the resources and the application is scheduled to generate
an estimate of the cycle count. Profile data is used to obtain the frequency of each operation. Examples of such
approaches are [7], [12] and [9].
Gong et al [7] proposed a scheduler which takes into account not only functional and storage unit resources but
also interconnectresources forperformance evaluation. They use a customized GNU C compiler (GCC) to trans-
late a C program into three address instructions. The three-address instruction format is based on a RISC like
load/store architecture in which only load and store operations access memory and all other operations work on
registers. A parallelizing compiler which is used to extract program parallelism is a fine-grain VLIW compiler
which takes serial three-address instruction code produced by GCC as input and generates parallel three-address
instruction code in which an instruction may contain more than one operation. The VLIW compiler schedules
operations as soon as possible using unlimited resources. A ultra-fine-grain scheduler is developed to exploit
hardware parallelism offered by various architectures. It takes either the serial three-address instruction code
or the parallel three-address instruction code as input and schedules them on various application-specific ar-
chitectures instantiated from the parameterized architecture model. The output is the parallel control code in
which register transfers in each control step are performed concurrently. A simulator is used to mimic the exe-
cution of the serial three-address code, the parallel three-address code as well as parallel control code to obtain
performance metrics.
Gupta et al [12] have developed a resource constrained scheduler that estimates the number of clock cycles,
given the description file of the target processor architecture, application timing constraints and the profiling
data. A key feature of this list scheduler is its capability to reflect the flexibility of the instruction set to handle
concurrency. Processor selector rejects processors which do not meet the constraints. Ghazal et al [9] have
developed a retargetable estimator for performance estimation required for architectural exploration using a
better architectural model. A distinguishing feature of their approach is that they consider several optimizing
transformations while mapping the application on to the target architecture. The optimizations considered in-
clude : optimized multi-operation pattern matching (e.g. multiply-accumulate), address mode optimization (e.g.
auto-update, circular buffer), loop optimization (e.g. pre-fetched sequential loads), loop vectorization/ packing,
simple if-else conversion (by use of predicated instructions), rescheduling within basic blocks, loop unrolling,
software pipelining etc. The flow diagram of the estimation scheme followed in both ([9] and [12]) approaches
is shown in fig. 3
One of the important features of the architectural models used in [9] and [12] is that it captures the differentiating
capabilitiesof the instruction set and special functional resources, rather than the complete specification required
for code synthesis or simulation. This helps in fast performance estimation. Further estimator used in [9] also
produces a trace of the application annotated with the suggested optimizations and ranked bottlenecks.
2. Simulator based : In the approaches suggested by [10], [19], [20], [18] [3] and [4], a simulation model of
the architecture based on the selected features is generated and the application is simulated on this model to
C Code
’SUIF’ Front End
Translation and
Annotation
Estimation
Cycle-level
Profiler
Parameterized
Architecture Model
Annotated Profile
Estimate,
. Translation of SUIF instructions to
Architecture-Compatible
Instructions
. Optimized Computation Patterns
. High-level Optimization Features
. Address Generation Cost
. Functional Unit Usage Rules
. Instruction Set Attributes
Figure 3: The Flow of Estimation Scheme : Ghazal [9] & Gupta [12]
compute the performance.
A system for the evaluation of architectures has been presented by Gloria et al [10]. The simulator, by using
pre-defined modules and the architecture description, reports performance and statistics about resource utiliza-
tion. Its engine is an event-driven algorithm also supporting various memory hierarchy structures (data-cache,
instruction-cache, bank interleaving, etc.). The application is translated into an intermediate code, composed of
simple instructions directly expressing primitive hardware functionalities. Optimization techniques such as loop
unrolling, data-dependency analysis, variable renaming and loop interchanging, are further applied in order to
increase the degree of parallelism. A sequential code simulation is then performed, in order to validate the code,
and to extract some early features which can perform preliminary architectural choices. For instance, frequently
executed sequence of instructions can be substituted by the introduction of new instructions.
Kienhuis et al [19] constructed a retargetable simulator for an architecture template. For each architecture
instance of the architecture template, a specific simulator is derived in three steps. The architecture instance is
constructed, an execution model is added and the executable architecture is instrumented with metric collectors
to obtain performance numbers. Object oriented principles together with a high-level simulation mechanism are
used to ensure retargetability and efficient simulation speed. Kin et al [20] propose an approach to design space
exploration for media processors considering power consumption. Aggressively optimized code is generated
using IMPACT compiler to increase instruction level parallelism. The optimized code is consumed by the Lsim
simulator. Measured run-times of benchmarks through simulations are used to compute the energy based on
the power model they have described. The power dissipation numbers are normalized with respect to a baseline
machine power dissipation.
Most researchers have focused on performance and area but do not address the power consumption. Only Kin et
al[20] and Imai et al[18] considered power consumption. Kin et al[20] computes power consumption of the generated
ASIP from a very coarse model which is based on the total cycle count. Main approaches considering performance
estimation are compared in table 2.

Approach Gloria Gong Binh Kinhuis Kin Gupta Gazhal
Attribute [10] [7] [2, 3] [19] [20] [12] [9]
Technique Simulation based Scheduler
based
Simulation
based
Simulation based Simulation based Scheduler based Scheduler based
Algorithm Extension of
list scheduling
branch-and-
bound
List scheduling List scheduling
FU consideration yes multiple iden-
tical FUs
yes yes
Interconnect
resources
yes yes yes
Optimizations loop-unrolling, data-
dependency analysis,
variable-renaming,
loop interchanging
no instruction level
parallelism
optimized multi-operation
pattern matching, address
modes, rescheduling, loop
unrolling
as above and loop vector-
ization, memory packing,
software pipelining etc.
Measure of per-
formance
cycle count and
resource allocation
statistics
performance
number
cycle count cycle count and trace of
the application annotated
with suggested optimiza-
tions
Memory hierar-
chy
yes yes
Other main fea-
tures
RAM and
ROM sizes
consideration
Metric collectors
used to obtain
performance
number
power consump-
tion and area con-
straints consider-
ation
only differentiating fea-
tures of instruction set is
captured
only differentiating fea-
tures of instruction set is
captured
Table 2: Comparison of major performance measurement techniques
4.3 Search Control
Algorithms for search range from branch-and-bound ([3] and [20]) to exhaustive over a restricted domain ([12]).
Binh et al [3] suggested a new HW/SW partitioning algorithm (branch-and-bound) for synthesizing the highest
performance pipelined ASIPs with multiple identical functional units. Constraints considered are given gate count
and power consumption. They have improvised their algorithm considering RAM and ROM sizes as well as chip
area constraints [4]. Chip area includes the hardware cost of the register file for a given application program with the
associated input data set. This optimization algorithm defines the best trade offs between the CPU core, RAM and
ROM of an ASIP chip to achieve highest performance while satisfying design constraints on the chip area. Kin et al
[20] first reduced the search space by eliminating machine configurationsnot satisfying given area constraint and those
that are dominated by at least one another machine configuration and then they used a branch-and-bound algorithm
for searching for an optimum solution fast.
Gupta et al [12] developed a processor selector which first reduces the domain of search by restricting the various
architectural parameter ranges based on certain gross characteristics of the processors, such as branch-delay, presence/
absence of multiply-accumulateoperation, depth of pipeline and memory bandwidths. The output is a smaller subset of
processors. Processor description files of this restricted range of processors are supplied to the performance estimator
which exhaustively explores this set.
5 Instruction Set Generation
We have found that almost all approaches to instruction set generation can be classified as either instruction set
synthesis approach or instruction set selection approach on the basis of how they are generating instructions.
1. Instruction set synthesis : In this class of techniques, instruction set is synthesized for a particular application
based on the application requirements, quantified in terms of the required micro-operations and their frequen-
cies. Examples of such approaches are in [16, 17], [15] and [11]. Theses approaches differ in the manner the
instructions are formed, from a list of operations.
Huang and Despain [16, 17] integrated problem of instruction formation with scheduling problem. Simulated
annealing technique is used to solve the scheduling problem. Instructions are generated from time steps in the
schedule. Each time step corresponds to one instruction. Pipelined machine with data stationary control model
is assumed. They had considered goal of the instruction set design as to optimize and trade off the instruction
set size, the program size and the number of cycles to execute a program. General multiple-cycle instructions
are not considered. Multiple-cycle arithmetic/logic operations, memory access, and change of control flow
(branch/jump/call) are supported by specifying the delay cycles as design parameters. The formulation takes
the application, architecture template, objective function and design constraints in the input and generates as
outputs the instruction set, resource allocation (which instantiates the architecture template) and assembly code
for the application. This approach is shown in fig. 4.
Hoon et al [15] proposed another approach which supports multi-cycle complex instructions as well. First the
list of micro-operations is matched to the primary instructions in order to estimate the execution time if only
these instructions are employed. If the estimated performance is unacceptable then the complex instructions are
considered. If the performance is still unacceptable, special instructions which require special hardware units

Applications
(CDFGs)
Design Constraints
Objective Function
Micro Architecture
Specifications
Scheduling /
Allocation Formation
Instruction Set Compiled Code
Instruction
Figure 4: The integrated scheduling / instruction-formation process
are included. Gshwind [11] describe an approach for application specific design based on extendable micropro-
cessor core. Critical code portions are customized using the application-specific instruction set extensions.
2. Instruction selection : In this class of techniques a superset of instructions is available and a subset of them
is selected to satisfy the performance requirements within the architecture constraints. Examples of such ap-
proaches are in [1], [2], [18], [31], [29] and [36]. All the approaches in this technique differ in the algorithms
they are using to select the instructions from the super set.
Imai et al [35, 18] assumes that the instruction set that can be divided into two groups : operations and functions.
It is relatively easy for a compiler to generate instructions corresponding to operators used in C language com-
pared to those which corresponds to functions. It is because that the full set of operations is already described,
but the full set of user-defined functions is not known a priori. They further divide the set of operations into two
subgroups : primitive operators and basic operators. The set of primitive operators is chosen so that other basic
operators can be substituted by a combination of primitive operators. Thus they have classified functionalities
as follows.
Primitive Functionalities (PF) : Can be realized by a minimal hardware component, such as ALU and
shifter.
Basic Functionalities (BF) : Set of operations used in C except those included in PF.
Extended Functionalities (XF) : Library functions or user defined functions.
The intermediate instructionsare described as primary RTL, basic RTL, and extended RTLrespectively for these
classes. Generated ASIP will include hardware modules corresponding to all of the primary RTL, but only a
part of the basic RTL and extended RTL. Selection problem is formulated as an integer linear programming
problem with the objective to maximize the performance of the CPU under the constraints of the chip area and
power consumption. The branch-and-bound algorithm is used to solve the problem. Later, they have revised
their formulation considering functional module sharing constraints and pipelining [1, 2].

* *
*
*
+
+
+
Figure 5: Expression tree
Some approaches [31, 36, 29] use pattern matching for instruction selection. The set of template patterns is
extracted from the instruction set and the graph representing the intermediate code of the application is covered
by these patterns. By arranging instruction patterns in a tree structure, matching process becomes significantly
fast.
For example there is an expression as follows.
y = w1 . x1 + w2 . x2 + w3 . x3 + w4 . x4
The corresponding expression tree is shown in fig. 5. This type of expression evaluation is very frequent in
DSP domain. Hardware configuration required to implement it is shown in fig. 6 a. The instruction patterns are
shown in fig. 6 b. Apart from intrinsic patterns MULT and ADD it has MAC also which performs multiplication
and addition together. If only intrinsicpatterns (ADD and MULT) are available for pattern matching then we get
matching as shown in fig. 7 b. If we use the pattern MAC as well then we get optimal cover as shown in fig. 7 a.
Using cost and delay of different patterns and the frequency count of this expression tree received from dynamic
profiling the cost-performance trade offs can be evaluated, and it can be decided that such complex instructions
should be included or not in the selected instruction set.
Liem et al [31] adopts a pattern matching approach to instruction set selection. A wide range of instruction
types is represented as a pattern set, which is organized in a manner such that matching is extremely efficient
and retargetting to architectures with new instruction set is well defined. Shu et al [36] have implemented the
matching method based on a pattern tree structureof instructions. Two genetic algorithms(GA) are implemented
for pattern selection: a pure GA which uses standard GA operators and a GA with backtracking which employs
variable-length chromosomes.
Our analysis also shows that there are design methodologies in both the instruction synthesis [11, 15] as well
as instruction selection [1, 2, 18] categories which start from a basic instruction set and only synthesize/ select
application-specific special or complex instructions. Comparison of various approaches for instruction set genera-
tion is shown in table 3.
There is an interesting approach given by Praet et al [32] which emphasizes instruction generation by a mix of
instruction selection and instruction synthesis. The main steps involved in this technique are instruction selection by
bundling and instruction set definition. A bundle is a maximal sequence of micro-operations in which each micro-
operation is directly coupled to its neighbors. Directly coupled micro-operations are primitive processor activities

*
+
Pipeline Register
Accumulator
+
*
*
+
MULT
MAC
ADD
a)
b)
Figure 6: a) Multiplier-accumulator , b) Instruction Patterns
* *
*
*
+
+
+
MULT
MAC
MAC
MAC
* *
*
*
+
+
+
MULT
ADD
MULT
MULT
MULT
ADD
ADD
a)
b)
Figure 7: a) Optimal cover with MAC , b) Cover with intrinsic patterns only

Instruction
Set Architecture (ISA)
Architecture Template Application
Retargetable Code Generator
Object Code
Figure 8: Retargetable Code Generator
which pass data to each other through a wire or latch. Graph structure was used for pattern matching rather than
tree structure. Instruction set definition includes selecting the representive application parts, selecting initial data part
out of a library based on statistics obtained from the analysis tool, iteratively updating these parts considering area/
performance trade offs and defining instruction encodings.
6 Code Synthesis
The work reported have followed two different approaches for code synthesis. They are retargetable code gener-
ator and compiler generator.
1. Retargetable Code Generator : Taking architecture template, instructionset architecture (ISA) and application
as inputs, object code is generated (fig. 8). [6], [38], [24, 25, 29], [21], [33], [13], [37] and [39] follow such an
approach.
All these approaches try to address following sub-problems while synthesizing instructions
(a) Instruction mapping: Instruction patterns are mapped to CDFG of given application using tree or graph
pattern matching technique and an optimal cover is formed.
(b) Resource allocation and binding: Resources like registers, memory, FUs, buses etc are allocated and cor-
responding bindings are performed.
(c) Scheduling: Instructions are scheduled for execution.
Some approaches address issue of code compaction also while generating code. Examples are [21], [24], [25]
and [29].
Cheng and Lin [6] address issue of reducing the memory access and register usage conflicts. The goal is to
maximize the possibility of scheduling more instructions into a control step. Wilson et al [38] formulated an
integer linear programming model to solve the three subproblems concurrently. Their model considers spill over
to memory as well. Leupers et al [24, 25, 29] suggest a two phase scheme using pattern matching for instruction
mapping. In the first phase the instructions are modeled as tree patterns and an optimal cover is computed, while
in the second phase a code compaction considering instruction level parallelism is done.

Approach Imai Liem Praet Huang Shu Leupers Hoon Gshwind
Attribute [35, 18, 1, 2] [31] [32] [16, 17] [36] [29] [15] [11]
Generation mech-
anism
selection selection selection
and syn-
thesis
synthesis selection selection synthesis synthesis
Technique/ Algo-
rithm
ILP, branch-and-
bound
tree pattern
matching,
dynamic
programming
graph
pattern
matching
modified scheduling prob-
lem, simulated annealing
tree pattern
matching,
genetic algo-
rithms
ILP, dynamic
programming
sub-set-sum prob-
lem
hw/sw co-
evaluation
Instruction types primary, basic and
special
single-cycle single-cycle,
multi-cycle
complex
intrinsic,
complex
Other main issues
and distinguish-
ing features
primary, basic and
special RTL for ba-
sic, primary and spe-
cial functionalities
capture be-
havioral
representation
of instructions
instruction utilization, in-
struction operand encod-
ing, delay load/ store and
delay branches. Integrated
instruction formation with
scheduling problem
better opti-
mization than
tree pattern
matching
Generated single
and multi-cycle
complex in-
structions then
sub-set-sum
technique
extendable
core tech-
nique, appli-
cation specific
instruction set
extensions
Table 3: Comparison of major instruction generation approaches

Assembler
Generator
Binary
Environment
Architecture
Design
Code
Source
C/C++
Compiler
Front End
Compiler
Back end
Assembler
Simulation
SUIF
ISDL
ISDL
Assembly
AVIV
Figure 9: Compiler frame work used by AVIV
Kreuzer et al [21] suggest a method for code compaction and register optimization to exploit instruction level
parallelism based on trellis tree straight-linecode generation algorithm. Retargetability is provided by the use of
target architecture description file. Algorithms for intermediate code generation, compaction and optimizations
are processor independent. Praet et al [33] have used graph based processor model in their approach which
including the processor connectivity and parallelism. They have defined the sub-problems of code generation
in terms of this processor model. Yamaguchi et al [39] presented new binding and scheduling algorithms for a
retargetable compiler which can deal with diverse architectures.
Hanono and Devadas [13] address all three subproblems concurrently using branch-and-bound approach. It
accomplishes this by converting the input application to a graphical representation that specifies all possible
ways of implementing the application on target processor. A detailed register allocation is carried out in the
second step, whereas its estimates are generated in the first step considering insertion of loads and spill over
to memory if the available resources are exceeded. Their approach is shown in Fig. 9. The compiler front
end receives a source program written in C/C++. It performs machine independent optimizations and generates
an intermediate format description in SUIF. The instruction set description language (ISDL) description of
the target processor is generated either by hand or by a high-level CAD tool. The compiler back end takes
the SUIF code and the ISDL description as inputs and produces assembly code specific to, and optimized for,
the target processor. The ISDL description is also used to create an assembler which transforms the code
produced by the compiler to a binary file that is used as input to an instruction-level simulator. Visser [37] used
simulated annealing technique for code generation. This technique focuses especially on highly irregular DSP
architectures. It fully tackles the compiler phase-coupling problem. Phase-coupling problem is how to order
various phases of code generation.
2. Compiler Generator : Taking architecture template and instruction set architecture as the inputs, a retargetable
compiler is generated. This is used to generate object code for the given application written in a high level
language (fig. 10). Examples are Hatche[14], Kuroda[23] and Leupers[30]. A compiler generated in this manner
generally has phases similar to general compilers, namely, program analysis, intermediate code optimization

Instruction
Set Architecture (ISA)
Architecture Template Application
Retargetable Compiler Generator
Object Code
Customized Compiler
Figure 10: Retargetable Compiler
and code generation. The difference is that the optimizations are tailored to the specific architecture-application
combination.
Hatcher and Tuller [14] developed a code generator generator that accepts a machine description in a YACC-
like format and a set of C structure definitions for valid tree nodes and produces C source (both functions and
initialized data) for a code generator which is time and space efficient. Its important features of their system
include compact machine description via operator factoring and leaf predicates, fast production of time and
efficient code generators. The System supports arbitrary evaluation orders and goal oriented code generation.
Kuroda and Nishitani [23] proposed a knowledge-based compiler for application specific signal processors.
Code optimization knowledge employed by expert programmer is implemented in the knowledge-base and is
applied in various phases of the compiler. The generated retargetable compiler RECORD by Leupers and Mar-
wedel [30] does not require tool-specific modeling formalism, but starts from general HDL processor models.
All processor aspects needed for code generation are automatically derived. Table 4 compares various code
synthesis approaches.
7 Conclusion and future work
We have identified five key steps in the process of designing ASIPs. We have presented a survey on the work
done while attempting classification of the approaches for each step in the synthesis process. Performance estimation
is based either on scheduler based or simulation based technique. Instruction set is generated either through synthesis
or a selection process, whereas, code is synthesized either by a retargetable code generator or by a custom generated
compiler.
Though, a variety of approaches have evolved in addressing each of the key steps, the target architecture space
being explored by these methodologies is still limited. With the increase in integration, it should be possible to support
memory hierarchies on the chip and the same has not been addressed in an integrated manner. Similarly issues of
pipelined ASIP design as well as low power ASIP design is in its infancy. We also observe that the problems of
processor synthesis and retargetable code generation have been considered in isolation.

Approach Hatcher Kuroda Saghir Cheng Wilson Leupers Kreuzer Praet Gebotys Yamaguchi Hanono Visser
Attribute [14] [23] [34] [6] [38] [25, 27, 26, 28] [21, 22] [33] [8] [39] [13] [37]
Code generator/
Compiler generator
compiler
genera-
tor
compiler
genera-
tor
code
genera-
tor
code
gener-
ator
code
gen-
erator
code generator code
genera-
tor
code
genera-
tor
code genera-
tor
code gen-
erator
code generator code
genera-
tor
Instruction mapping tree
pattern
match-
ing
graph pattern
matching
tree
pattern
match-
ing
graph
pattern
match-
ing
yes yes yes
Resource allocation
and binding
yes yes yes yes yes yes yes yes yes yes yes
Scheduling yes yes yes yes yes yes yes yes yes yes
Code optimization yes yes yes yes yes yes yes yes yes yes yes
Register spill over yes yes yes
Technique/ Algo-
rithm
tree
pattern
match-
ing
ILP branch-and-
bound
simulated
anneal-
ing
Retargetability yes yes yes yes yes yes yes yes yes yes yes yes
Instruction level par-
allelism
yes yes yes
Phase-ordering yes yes
Distinguishing fea-
tures
arbitrary
evalu-
ation
order
uses
experts
knowl-
edge
need for
kernel
synthe-
sis
compaction based
on a heuristic
scheduler, behav-
ioral/ structural
target arch., ad-
dress assignment
scheduling
followed by
instruction
mapping
mapping, binding
and schedul-
ing concurrent,
detailed reg. allo-
cation at second
step
Table 4: Comparison of major code synthesis approaches
References
[1] Alomary, A.; Nakata, T.; Honma, Y.; Imai, M.; Hikichi, N. : “An ASIP instruction set optimization algorithm with functional
module sharing constraint.”, Proceedings of the IEEE/ACM International Conference on Computer Aided Design 1993.
ICCAD-93. Digest of Technical Papers 1993 , 7-11 Nov. 1993, Pages: 526-532.
[2] Binh, N.N.; Imai, M.; Shiomi, A.; Hikichi, N. : “A hardware/software partitioning algorithm for pipelined instruction set
processor.”, Proceedings of the Design Automation Conference, 1995, with EURO-VHDL, EURO-DAC ’95, 18-22 Sept.
1995, Pages: 176-181.
[3] Binh, N.N.; Imai, M.; Shiomi, A. : “A new HW/SW partitioning algorithm for synthesizing the highest performance
pipelined ASIPs with multiple identical FUs.”, Proceedings of the Design Automation Conference, 1996, with EURO-VHDL
’96 , EURO-DAC ’96, 16-20 Sept. 1996, Pages: 126-131.
[4] Binh, N.N.; Imai, M.; Takeuchi, Y. : “A performance maximization algorithm to design ASIPs under the constraint of chip
area including RAM and ROM sizes.”, Proceedings of the Asia and South Pacific Design Automation Conference 1998
(ASP-DAC ’98), 10-13 Feb. 1998, Pages: 367-372.
[5] Childers, B.R.; Davidson J.W. : “Application Specific Pipelines for Exploiting Instruction-Level Parallelism.”, University of
Virginia Technical Report No. CS-98-14, May 1, 1998.
[6] Cheng W.; Lin Y. : “Code generation for a DSP processor.”, Proceedings of the Seventh International Symposium on High-
Level Synthesis 1994, 18-20 May 1994, Pages: 82-87.
[7] Gong J.; Gajski, D.D.; Nicolau, A. : “Performance evaluation for application-specific architectures.”, IEEE Transactions on
Very Large Scale Integration (VLSI) Systems, Dec. 1995 Vol. 3 Issue: 4, Pages: 483-490.
[8] Gebotys, C.H. : “An efficient model for DSP code generation: performance, code size, estimated energy.”, Proceedings of
the Tenth International Symposium on System Synthesis 1997, 17-19 Sept. 1997, Pages: 41-47.
[9] Ghazal, N.; Newton, R.; Jan Rabaey. : “Retargetable estimation scheme for DSP architectnre selection.”, Proceedings of the
Asia and South Pacific Design Automation Conference 2000 (ASP-DAC 2000), 25-28 Jan. 2000, Pages: 485-489.
[10] Gloria A. D.; Faraboschi, P. : “An evaluation system for application specific architectures.”, Proceedings of the 23rd Annual
Workshop and Symposium on Microprogramming and Microarchitecture. (Micro 23), 27-29 Nov. 1990, Pages: 80-89.
[11] Gschwind, M. : “Instruction set selection for ASIP design.”, Proceedings of the Seventh International Workshop on Hard-
ware/Software Codesign 1999 (CODES ’99), 3-5 May 1999, Pages: 7-11.
[12] Gupta, T.V.K.; Sharma, P.; Balakrishnan, M.; Malik, S. : “Processor evaluation in an embedded systems design environ-
ment.”, Proceedings of Thirteenth International Conference on VLSI Design 2000, 3-7 Jan. 2000, Pages: 98-103.
[13] Hanono, S.; Devadas, S. : “Instruction selection, resource allocation, and scheduling in the AVIV retargetable code genera-
tor.”, Proceedings of the Design Automation Conference 1998, 15-19 June 1998, Pages: 510-515.
[14] Hatcher, P.J.; Tuller, J.W. : “Efficient retargetable compiler code generation.”, Proceedings of the International Conference
on Computer Languages 1988, 9-13 Oct. 1988, Pages: 25-30.
[15] Hoon Choi; In-Cheol Park; Seung Ho Hwang; Chong-Min Kyung : “Synthesis of application specific instructions for
embedded DSP software.”, Proceedings of the IEEE/ACM International Conference on Computer-Aided Design, 1998.
ICCAD 98. Digest of Technical Papers 1998, 8-12 Nov. 1998, Pages: 665 - 671.
[16] Huang, I.J.; Despain, A.M. : “Generating Instruction Sets And Microarchitectures From Applications.”, Proceedings of the
IEEE/ACM International Conference on Computer-Aided Design 1994, 6-10 Nov. 1994, Pages: 391-396.
[17] Huang I.J.; Despain, A.M. : “Synthesis of application specific instruction sets.”, IEEE Transactions on Computer-Aided
Design of Integrated Circuits and Systems, June 1995 Vol. 14 Issue: 6 Pages: 663-675.
[18] Imai, M.; Alomary, A.; Sato, J.; Hikichi, N. : “An integer programming approach to instruction implementation method
selection problem.”, Proceedings of the European Design Automation Conference, 1992., EURO-VHDL ’92, EURO-DAC
’92, 7-10 Sept. 1992, Pages: 106 - 111.
[19] Kienhuis, B.; Deprettere, E.; Vissers, K.; van der Wolf, P. : “The construction of a retargetable simulator for an architecture
template.”, Proceedings of the Sixth International Workshop on Hardware/Software Codesign 1998 (CODES/CASHE ’98),
15-18 March 1998, Pages: 125-129.
[20] Kin, J.; Chunho Lee; Mangione-Smith, W.H.; Potkonjak, M. : “Power efficient mediaprocessors: design space exploration.”,
Proceedings of the 36th Design Automation Conference 1999, 21-25 June 1999, Pages: 321-326.
[21] Kreuzer, W.; Gotschlich, M.; Wess, B. : “A retargetable optimizing codegeneratorfor digital signalprocessors.”,Proceedings
of the IEEE International Symposiumon Circuits and Systems 1996.ISCAS ’96., Connecting the World., 1996, Vol.2, Pages:
257-260.
[22] Kreuzer, W.; Wess, B. : “Cooperative register assignment and code compaction for digital signal processors with irregular
datapaths.”, Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, 1997. ICASSP-
97, 21-24 April 1997, Vol. 1, Pages: 691-694.
[23] Kuroda, I.; Nishitani, T. : “A knowledge-basedretargetable compiler for application specificsignal processors.”, Proceedings
of the IEEE International Symposium on Circuits and Systems 1989, 8-11 May 1989, Vol. 1, Pages: 631-634.
[24] Leupers, R.; Schenk, W.; Marwedel, P. : “Retargetable assembly code generation by bootstrapping.”, Proceedings of the
Seventh International Symposium on High-Level Synthesis 1994, 18-20 May 1994, Pages: 88-93.
[25] Leupers, R.; Niemann, R.; Marwedel, P. : “Methods for retargetable DSP code generation.”, Proceedings of the International
Workshop on VLSI Signal Processing, VII, 1994, 26-28 Oct. 1994, Pages: 127 - 136.
[26] Leupers, R.; Marwedel, P. : “A BDD-based frontend for retargetable compilers.”, Proceedings of the European Design and
Test Conference, 1995. ED&TC 1995, 6-9 March 1995, Pages: 239-243.
[27] Leupers, R.; Marwedel, P. : “Time-constrained code compaction for DSPs.”, IEEE Transactions on Very Large Scale In-
tegration (VLSI) Systems, March 1997, Vol. 5, Issue: 1, Proceedings of the International Conference on Very Large Scale
Integration (VLSI) Systems 1995, 18-20 Jan. 1995, Pages: 112-122.
[28] Leupers, R.; Marwedel, P. : “Algorithms for address assignment in DSP code generation.”, Proceedings of the IEEE/ACM
International Conference on Computer-Aided Design, 1996. ICCAD-96. Digest of Technical Papers 1996, 10-14 Nov. 1996,
Pages: 109-112.
[29] Leupers, R.; Marwedel, P. : “Instruction selection for embedded DSPs with complex instructions.”, Proceedings of the
European Design Automation Conference, 1996, with EURO-VHDL ’96, EURO-DAC ’96, 16-20 Sept. 1996, Pages: 200-
205.
[30] Leupers, R.; Marwedel, P. : “Retargetable generation of code selectors from HDL processor models.”, Proceedings of the
European Design and Test Conference, 1997. ED&TC 97, 9-13 June 1997, Pages: 534-539.
[31] Liem, C.; May, T.; Paulin, P. : “Instruction-set matching and selection for DSP and ASIP code generation.”, Proceedings of
the European Design and Test Conference, 1994. EDAC, The European Conference on Design Automation. ETC European
Test Conference. EUROASIC, 28 Feb.-3 March 1994, Pages: 31-37.
[32] Praet J.V.; Goossens, G.; Lanneer, D.; De Man, H. : “Instruction set definition and instruction selection for ASIPs.”, Pro-
ceedings of the Seventh International Symposium on High-Level Synthesis 1994, 18-20 May 1995, Pages: 11-16.
[33] Praet, J.V.; Lanneer, D.; Goossens, G.; Geurts, W.; De Man, H. : “A graph based processor model for retargetable code
generation.”, Proceedings of the European Design and Test Conference 1996 (ED&TC 96), 11-14 March 1996, Pages: 102-
107.
[34] Saghir, M.A.R.; Chow, P.; Lee, C.G. : “Application-driven design of DSP architectures and compilers.”, Proceedings of the
IEEE International Conference on Acoustics, Speech, and Signal Processing 1994 (ICASSP-94), 19-22 April 1994, Pages:
II/437-II/440 Vol.2.
[35] Sato, J.; Imai, M.; Hakata, T.; Alomary, A.Y.; Hikichi, N. : “An integrated design environment for application specific
integrated processor.”, Proceedings of the IEEE International Conference on Computer Design: VLSI in Computers and
Processors 1991, ICCD ’91, 14-16 Oct. 1991, Pages: 414-417.
[36] Shu, J.; Wilson, T.C.; Banerji, D.K. : “Instruction-set matching and GA-based selection for embedded-processor code
generation.”, Proceedings of the Ninth International Conference on VLSI Design 1996, 3-6 Jan. 1996, Pages: 73-76.
[37] Visser, B.-S. : “A framework for retargetable code generation using simulated annealing.”, Proceedings of the 25th EU-
ROMICRO Conference 1999, 8-10 Sept. 1999, Pages: 458-462.
[38] Wilson, T.; Grewal, G.; Halley, B.; Banerji, D. : “An integrated approach to retargetable code generation.”, Proceedings of
the Seventh International Symposium on High-Level Synthesis 1994, 18-20 May 1994, Pages: 70-75.
[39] Yamaguchi, M.; Ishiura, N.; Kambe, T. : “Binding and scheduling algorithms for highly retargetable compilation.”, Pro-
ceedings of the Asia and South Pacific Design Automation Conference 1998 (ASP-DAC ’98), 10-13 Feb. 1998, Pages:
93-98.
