Glossary of
Connected and Automated Vehicle Terms
VERSION 1.0
March 2018
Prepared by
University of Virginia Center for Transportation Studies
Hyungjun Park, Zulqarnain Khattak, and Brian Smith
for the
Connected Vehicle Pooled Fund Study
1
Glossary of Connected and Automated Vehicle Terms
Version 1.0
March 2018
Absolute Positioning
Locating the position of a vehicle, to a very high degree of accuracy, with respect to an ideal
surface of the Earth (1).
Ad Hoc Clustering
Clustering process during which vehicles arrive in random sequence and not deliberately seek
out other similarly equipped vehicles. During this case, the probability of driving behind another
suitably equipped vehicle is directly related to the market penetration of equipped vehicles (2).
Also see “ITS Ad Hoc Domain”. Most of the existing Cooperative Adaptive Cruise Control
(CACC) applications rely on ad-hoc clustering of vehicles.
Advanced Driver Assistance System (ADAS)
Additional electronic systems in motor vehicles supporting the driver in certain driving
situations. They often focus on safety aspects or on increased driving convenience. ADAS safety
features are designed to avoid collisions and crashes by offering technologies that alert the driver
to potential problems, or for example, automate the vehicle lighting to come on at dusk or sudden
darkness, provide adaptive cruise control, give automated braking, assist a vehicle to stay in its
lane, give automated traffic warnings via GPS, allow hands free voice activated smartphone
connection, alert drivers to other cars or dangers, etc. There are many forms of ADAS available
that function from data supplied by modules such as cameras, Light Detection and Ranging
(LIDAR), radar, sensors, computers, and in-car networking. Emerging ADAS systems will also
take advantage of externally supplied data through V2V and V2X systems through real time
interface with other vehicles and surrounding infrastructure (1).
Advanced Collision Avoidance Technologies (ACAT)
A National Highway Traffic Safety Administration (NHTSA) program that is defining
methodologies to measure the link between technological performance and safety impact of
crash avoidance systems (4).
Aftermarket
Equipment that is installed or brought in after purchase of the vehicle. Aftermarket modifications
do not involve the original equipment manufacturer (OEM), as contrasted with retrofits which
are done with the involvement of OEM (1).
Aftermarket Safety Device (ASD)
A connected device, not integrated during vehicle manufacture but added after sale. It is installed
in a vehicle and is capable of sending and receiving messages over a Dedicated Short-Range
Communication (DSRC) wireless communications link. The device has a driver interface, runs
V2V and V2I safety applications, and issues audible or visual warnings and/or alerts to the driver
of the vehicle (5).
2
Antilock Braking System (ABS)
A system that prevents wheel lock-up by automatically regulating the brakes. ABS can decrease
braking distances on slippery pavement, prevent skidding, and provide greater control during
sudden stops (6).
Application-Specific Integrated Circuit (ASIC)
An integrated circuit that is customized for a specific use; for example, an AISC designed to
accelerate computer vision (7).
ASIC can be found in almost any electronic device and its uses can range from custom rendering
of images to sound conversion (37).
Artificial Intelligence (AI)
Intelligence that is learned, displayed, and carried out by machines. An "intelligent" machine
perceives its environment and then takes actions that maximize its chance of success at some
goal. Examples that we know include human speech recognition, which turns spoken words into
the contents of a text document or email, and autonomous driving, where the vehicle has a
learning element to recognize its environment including other vehicles, pedestrians and the
infrastructure (3).
Intelligence and decision-making that come from a machine and an autonomous vehicle is
known as artificial intelligence. Deep learning and machine learning are mainly included in AI
(7).
Automated Driving System (ADS)
A complex combination of various components that can be defined as systems where perception,
decision making, and operation of the automobile are performed by electronics and machinery
instead of a human driver, and as introduction of automation into road traffic (43). Automated
Driving Systems may include systems for which there is no human driver or for which the
human driver can give control to the automated driving systems and would not be expected to
perform any driving-related tasks for a period of time (42).
Automated Emergency Braking (AEB)
A system that detects an impending forward crash with another vehicle in time to avoid or
mitigate the crash. These systems first alert the driver to take corrective action to avoid the crash.
If the driver’s response is not sufficient to avoid the crash, the AEB system may automatically
apply the brakes to assist in preventing or reducing the severity of a crash. The NHTSA (8)
believes these technologies represent the next wave of potential significant advances in vehicle
safety. AEB systems, such as dynamic brake support (DBS) and crash imminent braking (CIB),
have the potential not only to save lives but to also reduce moderate and less severe rear-end
crashes that are common on our roadways (9).
Automated Highway System (AHS)
An automated highway or Smart Road, is an intelligent transportation system facility- designed
primarily for driverless or autonomous vehicles on specific, pre-determined routes. It is mainly
3
devised as a means of relieving traffic congestion. These systems greatly reduce distances
normally required between the vehicle in front, therefore enabling the road to carry more
cars. AHSs are usually combined with ADAS technologies, such as adaptive cruise control and
collision avoidance systems (3).
Automated Vehicle
See “Terminologies for a Vehicle with Automation Capability” and “Levels of Driving
Automation”.
Automotive Data Center
A center designed specifically to handle the workloads associated with the development of
autonomous vehicles, including deep learning training and cloud services (7). The development
of autonomous vehicles starts in the automotive data center.
AutoNOMOS – Autonomous Vehicle Software
A modular software system for the operation of autonomous or semi-autonomous cars. Using
AutoNOMOS, it will be possible to detect impending dangers on roads, highways, and crossings
(lane changes, traffic jams, rights of way) at an early stage crashes in order to prevent crashes.
Once the technology is ready, it will be introduced first on private property (test sites) and later
in public traffic (3).
Autonomous Vehicle
See “Terminologies for a Vehicle with Automation Capability” and “Levels of Driving
Automation”.
Basic Safety Messages (BSM)
Data broadcasted from vehicles through V2V and V2I at a frequency of 10 Hz. The core contents
of a BSM are data elements that describe a vehicle’s position (latitude, longitude, and elevation)
and motion (heading, speed, and acceleration) (10).
Big Data
The information assets characterized by such a High Volume, Velocity and Variety to require
specific Technology and Analytical Methods for its transformation into Value (40).
Blind Spot Monitoring
One of the ADAS applications that monitors the driver’s blind spots at the rear quarters of the
car and provides visual, audible and/or tactile alerts when a vehicle is present in a situation
requiring such alerts (6).
Brake Assist
One of the ADAS applications that automatically applies full braking power when it detects that
the driver is executing a panic stop (6). Brake Assist helps in detection of attempted panic
braking based on the force that is applied to the brake pedal and how fast the driver is stepping
on the pedal.
4
Cellular Telecommunications Industry Association (CTIA)
An industry trade group that represents the international wireless telecommunications industry.
Its members include cellular, personal communication services and enhanced specialized mobile
radio providers and suppliers, and providers and manufacturers of wireless data services and
products (4). Please refer to Table 1 Various Related Associations in the appendix for more
related associations.
Central Processing Unit (CPU)
The electronic circuitry in a vehicle’s (CAVs) computing system that performs programming
instructions; for example, Intel Atom® and Intel® Xeon® processors. See also “In-Vehicle
Compute”; “Intel Atom® Automotive Processors”; and “Intel® Xeon® Processors” (7).
Certificate
A set of data that uniquely identifies an entity, contains the entity’s public key and possibly other
information, and is digitally signed by a trusted party, thereby binding the public key to the entity
(1).
Certification
The process of assuring that a system component or interface meets an established standard (1).
Cloud Computing
A cloud refers to accessing computers, information technology (IT), and software applications
through a network connection, often by accessing data centers using wide area networking
(WAN) or Internet connectivity (49). Cloud computing replaces local data storage with storage
in a “cloud” that can be accessed via the Internet (11). This generally involves the delivery of
hosted computing services over the Internet rather than on an individual computer or at an
individual organization’s location. A variety of computing services may be included “in the
cloud,” from network servers to software applications (12).
Collision Avoidance Metrics Partnership (CAMP)
A partnership formed by vehicle OEMs to accelerate the implementation of crash avoidance
countermeasures in passenger vehicles to improve traffic safety (51). CAMP partnership is
engaged in cooperative research with National Highway Traffic Safety Administration (NHTSA)
to advance safety research objectives of the Department’s Intelligent Vehicle Initiative.
Computer Vision
Machine-assisted moderation of images and the ability to extract rich information from images to
categorize and process visual data (13). Such systems, also known as machine vision, are
responsible for the autonomous vehicle’s ability to “see” its environment. Examples include the
technologies developed by Mobileye and Itseez (7).
Connected Vehicle (CV)
A vehicle (car, truck, bus, etc.) that is equipped with a wireless communication device (1). A CV
uses any of the available wireless communication technologies to communicate with other cars
on the road (vehicle-to-vehicle [V2V]), roadside infrastructure (vehicle-to-infrastructure [V2I]),
and other travelers and the cloud (14) (15).

5
A research program – sponsored by the USDOT Research and Innovative Technology
Administration (RITA) and others – focusing on the development and deployment of a fully
connected transportation system that makes the most of multi-modal, transformational
applications addressing safety, mobility, and the environment (52).
Connected Vehicle Applications
Applications that are built to take advantage of a connected vehicle environment. As of
September 2017, the latest list of connected vehicle applications was prepared and provided at
the Architecture Reference for Cooperative and Intelligent Transportation (ARC-IT) website
(34). Descriptions of individual connected vehicle applications are not included in this glossary,
however the twelve application groups in which these applications are categorized are provided
in Table 1.
Table 2 Group of Connected Vehicle Applications from ARC-IT
Application Group Details
Commercial Vehicle
Operations
Includes applications and service packages that are relevant to the
operation, safety and management of commercial vehicles.
Data Management Includes service packages from various data sources including CVs to
support performance monitoring and other uses of historical data.
Maintenance and
Construction
Includes service packages that track maintenance and construction
vehicles and supports dissemination of these activities.
Parking Management Includes service packages that monitors and manages parking spaces
and provides real time information on park and ride services to
support travelers’ decision making.
Public Safety Includes service packages to support basic public safety, call-taking
and dispatch services and provides information to support dynamic
routing of emergency vehicles.
Public Transportation Includes service packages to monitor automated transit vehicle
location, perform automated dispatch of transit services and allows
travelers to request trips and request itineraries.
Support Includes service packages to provide monitoring, management and
control services to other applications and devices operating within CV
environment.
Sustainable Travel Includes service packages to monitor individual vehicle emissions and
support environmentally efficient operation of traffic signals and
lanes.
Traffic Management Includes service packages to support infrastructure and vehicle based
Surveillance and the use of CV information to improve the operation
of traffic systems.
Traveler Information Includes service packages to disseminate traveler information for
route planning and guidance.
Vehicle Safety Includes service packages that leverages sensors and safety messages
transmitted between CVs to support and augment vehicle safety
Weather Includes service packages for collecting road weather data and detect
environmental hazards to alert drivers.
6
Some of the representative CV applications along with a short description are provided below:
Advanced Automated Crash Notification Relay (AACN–RELAY): An application
that is anticipated to help transmit a range of data via other vehicles and roadside hot
spots that can help to enhance incident response (2).
Emergency Vehicle Preemption (EVP): An application providing emergency vehicles
with an expedited green indication to allow faster passage through a signalized
intersection (4).
Emergency Evacuation and Communication (EVAC): An application providing
dynamic route guidance information, current traffic and road conditions, location of
available lodging, and location of fuel, food, water, cash machines, and other necessities
(1).
Incident Scene Work Zone Alerts for Drivers and Workers (INC-ZONE): An
application with two components: one warns drivers that are approaching temporary
work zones at unsafe speeds or trajectories; the other audibly warns public safety
personnel and other officials working in such zones about potential vehicle incursions
(4).
Integrated Dynamic Transit Operations (IDTO): The bundle of applications that
transform transit mobility, operations, and services through the availability of new data
sources and communications. IDTO consist of three applications, T-CONNECT, T-DISP
and D-RIDE (4).
Intelligent Traffic Signal System (ISIG): A traffic signal system that uses data
collected from vehicles through V2V and V2I communications as well as pedestrian and
non-motorized travelers to control signals and maximize flows in real time. The ISIG
application also plays the role of an overarching system optimization application,
accommodating transit or freight signal priority, preemption, and pedestrian movements
to maximize overall network performance (4).
Mobile Accessible Pedestrian Signal System (PED-SIG): A signal system that
integrates information from roadside or intersection sensors and new forms of data from
pedestrian-carried mobile devices (4).
Multimodal Intelligent Traffic Signal System (MMITSS): A V2I connected vehicle
application bundle that is the next generation of traffic signal systems. MMITSS provides
a comprehensive framework to serve all modes of transportation, including general
vehicles, transit, emergency vehicles, freight fleets, pedestrians, and bicyclists (4).
Connected Vehicle Reference Implementation Architecture (CVRIA)
A research effort by the ITS Joint Program Office (JPO) that aims to identify key interfaces of
the Connected Vehicle environment and to develop a plan for Connected Vehicle Standards (5).
The CVRIA has now been incorporated into the national ITS architecture (ARC-IT) and will no
longer be a separate architecture.
Connected Vehicle Trade Association (CVTA)
A non-profit business association established to facilitate the interaction and advance the
interests of the entities involved in the vehicle communication environment. The association
enables the collaboration of companies, organizations, and governmental bodies engaged in
developing bidirectional vehicle communications. Membership is open to any corporation, public
7
entity, standards and specification organization, educational institution, or qualified individual
(5).
Constant Distance Gap (CDG)
CDG employs a constant separation between vehicles even when the speed of vehicles changes
during platooning. With such a tight control, the vehicle occupants experience the perception of a
mechanical linkage between vehicles. This type of control can only be achieved stably when the
communication received by each vehicle includes the information of the platoon leader or first
vehicle in the sequence (2).
Constant Time Gap (CTG)
With CTG, the distance between the vehicles is proportional to their speed (plus a small fixed
offset distance). A doubling of speed leads to an approximate doubling of clearance gap between
the vehicles. This (CTG) most closely represents the way human drivers normally drive at
highway speeds, therefore, commercially available adaptive cruise control systems use CTG (2).
Cooperative Systems
A term specified for systems that can bring new intelligence for vehicles, roadside systems,
operators and individuals, by creating a universally understood communications “language,”
allowing vehicles and infrastructure to share information and cooperate in an unlimited range of
new applications and services (1).
Cooperative Awareness Message (CAM)
A core message of the communications network, regularly providing key information to and
from ITS stations (1). The standard CAM is one of the components of the reference architecture
defined by the European Telecommunication Standards Institute (ETSI) for transmitting
geographically aware information with relevant data for other vehicles (17). CAM messages are
periodically sent and contain basic safety relevant status information like node actual position,
speed, acceleration or heading as well as the node identifier (18).
CV Penetration
A term representing the proportion of the vehicle fleet that are equipped with CV technology (4)
(5). The ability to use CV data depends on the penetration rate of equipped vehicles and the
underlying traffic conditions. Hence, there is a limit of a minimum penetration rate for accurate
estimation of various measures of effectiveness (MOEs) (19).
Cybersecurity
A broad term referring to the processes and practices designed to protect networks, computers,
programs and data from attack, damage or unauthorized access (50). In today’s connected world,
cybersecurity is an emerging threat in every field that relies upon communications. Therefore,
transportation operation and management systems utilizing wired and wireless communications
for managing roadways are also at significant risk of such cyberattacks.
Data Authentication
A process used to verify data integrity, e.g., verification that data received are identical to data
sent, or verification that a program is not infected by a virus (1).
8
Decentralized Environmental Notification Message (DENM)
A message, defined in the EU standard, providing information about a location based situation
detected by vehicles or roadside units and distributed by store and forward mechanisms within
the ITS Ad Hoc Domain without a central control unit (1).
Decision-Making (decide)
The third and final of the three stages of in-vehicle computing required for autonomous driving
(sense, fuse, decide). In this stage, the vehicle must decide how to proceed based on the model it
has created of its environment. See also “Perception” and “Sensor Fusion” (7).
Dedicated Short Range Communication (DSRC)
A communications protocol developed to address the safety critical issues associated with
sending and receiving data among vehicles and between moving vehicles and fixed roadside
access points. These provide low-latency data-only V2V and V2I communications for use in
applications such as Electronic Fee Collection (EFC), crash avoidance, In-Vehicle Signing and
Cooperative Adaptive Cruise Control (CACC) (1). The term “DSRC” originally was used to
refer to tolling systems at 5.8 GHz. Now the term is also used to refer to DSRC operation at 5.9
GHz under the IEEE 802.11p standard).
Deep Learning
A subset of machine learning that involves many layers of processing, massive amount of data,
and enormous computing capacity. Deep learning algorithms can facilitate computer vision,
natural language processing, driving strategy, personalization, and decision-making (7).
Digital Instrument Cluster
A digital panel or dash inside the vehicle that includes instruments such as a speedometer, fuel
gauge, and odometer (7).
Driver Alertness Monitoring
One of the ADAS applications that monitors driver behavior for indications of drowsy or
distracted driving. When warranted, the system provides visual and audible alerts advising the
driver to take rest (6).
Driverless Car Sharing
In terms of the future Driverless era, the meaning of Car Sharing will be the use of one’s own
Autonomous Vehicle, hired by others, during times that the owner does not require to use it.
Alternatively, a Driverless Vehicle owned by a hire company can be shared / rented by many on
a daily, hourly, or more likely, per journey basis (3).
Driverless Vehicle
See “Terminologies for a Vehicle with Automation Capability” and “Levels of Driving
Automation”.
9
Driving Volatility
Liability of driving behaviors to change rapidly and unexpectedly, especially for the worse, that
can be measured by the key measures of longitudinal and lateral acceleration (5). Driving
behaviors however, can also be captured by other measures, such as steering angles and the
position of the accelerator or brake in a vehicle (10).
Dynamic Driving Task
Various activities required to operate a moving vehicle in an environment that changes due to
alignment, weather, roadside conditions, etc. These tasks include steering, braking, accelerating,
etc. (23).
Early Adopter
A person, company, municipality or country that starts using technology including a CV product
as soon as it becomes available (5). In general, this term is also used for referring to people who
become the first users of any other sort of technology.
Electronic Brake Force Distribution
A system that helps reduce stopping distances by using ABS components to vary front-to-rear
braking force. The system compensates for different vehicle loads, and distributes normal weight
transfer to the front axle during a stop (6).
Electronic Control Unit (ECU)
A unit embedded in the vehicle that controls one or more electrical systems, such as the engine
control unit or the human-machine interface (7).
Electronic Stability Control (ESC)
A system that provides selective wheel braking to improve vehicle handling and help drivers
regain control in certain extreme circumstances. ESC employs components of the anti-lock
braking system and is required on all passenger vehicles starting with the 2012 model year.
Systems on SUVs generally also incorporate Rollover Mitigation (6).
Extended Floating Car Data (XFCD)
An extension of floating car data (FCD) (1) that uses additional information from all advanced
driver assistance systems (11).
Far Infrared Sensors (FIRS)
A heat sensing product used by vehicle manufacturers to capture a heat profile of living objects
in low or even zero light situations to detect the existence of pedestrians on or near the road at
night time or in poor visibility. FIRS helps alleviate the limitation of traditional night vision
camera sensors that cannot operate optimally with low light conditions, and allows better
recognition of pedestrians for fully Autonomous Vehicle systems (3).
Field-Programmable Gate Array (FPGA)
An integrated circuit that can be configured after manufacturing, offering more flexibility than
CPUs or GPUs. It is often used as an accelerator and excels at parallel processing. See also “In-
Vehicle Compute and “Intel® Arria® Series FPGAs” (7).
10
Floating Car Data (FCD)
Data (or a method to collect the data) of vehicles currently being driven (20). In particular, FCD
is the data about a vehicle’s movement and location while it is in motion and when it is
stationary, e.g. in congestion, at traffic lights or in waiting areas (a data set containing at least a
time stamp and the location’s coordinates). In floating car data, cars become mobile sensors or
software agents (11).
Freight Signal Priority (FSP)
A method of signal priority that provides right of way at signals near freight facilities based on
current and projected freight movements (4).
Graphics Processing Unit (GPU)
A specialized electronic circuit designed to accelerate image and graphics processing. GPUs
excel at parallel processing. See also “In-Vehicle Compute” (7).
Heterogeneous Architecture
A combination of multiple types of compute functions—such as CPUs, FPGAs, and ASICs—
working together in a complementary fashion (7).
Highly Automated Vehicles (HAV)
SAE Levels 3-5 vehicles with automated systems that are responsible for monitoring the driving
environment, in order to draw a distinction between Levels 0-2 and 3-5 based on whether the
human operator or the automated system is primarily responsible for monitoring the driving
environment (39).
High Intensity Discharge (HID) Headlights:
Headlights that use high voltage to ionize a mix of gases, including xenon, in a special bulb to
produce an extra-white or even bluish light that is several times brighter than a conventional
halogen headlight (6).
Human Machine Interface (HMI)
An interface responsible for two-way communication between a vehicle and its occupants. An
HMI may incorporate touchscreen displays, voice recognition, or integration with mobile
devices. It enables a human being to interact with a machine (11).
Head Up Display (HUD)
A display of important information within the user’s field of vision (11).
Incident Scene Pre-Arrival Staging Guidance for Emergency Responders (RESP-STG)
An application providing information to public safety responders while en-route to help guide
them safely and efficiently to an incident scene (4).
Information and Communication Technology (ICT)
Various types of technologies that are used for processing and delivering information and
communication (11).
11
Infrastructure Device
Any piece of equipment connected to the cooperative system that is placed on the roads, bridges,
rail-lines, and similar public works that are on or near a transportation system or other public
institution (1).
Internet of Things (IoT)
A network of physical objects—devices, vehicles, buildings, machines, and other items—
embedded with electronics, software, sensors, and network connectivity that enables these
objects to collect and exchange data. In its simplest terms, the IoT is about physical “things” with
the ability to sense, actuate, and communicate (21). According to Gartner, Inc., connected things
would reach 25 billion by 2020 (3).
Internet of Vehicles (IoV)
A network of vehicles defined as an integration of three networks: an inter-vehicle network, an
intra-vehicle network, and vehicular mobile network. Based on this concept of three networks
integrated into one, the Internet of Vehicles is defined as a large-scale distributed system for
wireless communication and information exchange between vehicle, road, human and Internet,
according to agreed communication protocols and data interaction standards (3).
Interoperability
The ability of a system to communicate with other systems to provide the same service in
different physical locations. It is also the ability of one system (or component) to replace another
without degrading the service being provided. The term is frequently used in the context of
public safety communications and Dedicated Short-Range Communications (DSRC) (1). For
example:
It is critical that transportation agency communications systems be interoperable with
those of the other responders with whom they will be working at incident scenes.
Interoperability is an important issue for law enforcement, fire-fighting, emergency
services, and other public health and safety departments because first responders need to
be able to communicate during wide scale emergencies. The nation’s lack of
interoperability in the public safety realm became evident during the September 11, 2001,
attacks on the Pentagon and World Trade Center structures.
Standards for DSRC are intended to meet the requirements of applications that
depend upon transferring information between vehicles and roadside devices as well as
between vehicles themselves. SAE J2735 (DSRC Message Set Dictionary) is to support
interoperability among DSRC applications (22).
Intel Atom® Automotive Processors
A generation of Intel Atom processors that powers in-vehicle experiences and ADAS. These
processors offer substantial computing capacity in a low-power package. See also “ADAS”; “In-
Vehicle Compute”; and “In-Vehicle Experiences” (7).
Intel® Field-Programmable Gate Arrays (FPGAs)
Programmable Arrays, formerly owned by Altera and acquired by Intel, offering flexible in-
vehicle compute and power-performance-efficient acceleration to support autonomous driving.

12
These FPGAs deliver a combination of high performance and power efficiency for acceleration
(7).
Intel® GO™ Automotive Solutions
A portfolio of solutions designed for autonomous driving and in vehicle experiences. Ranging
from car to cloud, these solutions include development platforms for in vehicle computing, a 5G
connectivity platform, a software development kit and data center technologies (7).
Intelligent Transportation System (ITS) Architecture
A framework within which interrelated systems can be built that work together to deliver
transportation services. It defines how systems functionally operate and the interconnection of
information exchanges that must take place between these systems to accomplish transportation
services (52).
Intelligent Transportation System (ITS) Architecture
A framework within which interrelated systems can be built that work together to deliver
transportation services. It defines how systems functionally operate and the interconnection of
information exchanges that must take place between these systems to accomplish transportation
services (52). The National ITS Architecture, entitled the Architecture Reference for
Cooperative and Intelligent Transportation (ARC-IT), provides a starting point creation of
regional ITS architectures and project ITS architectures and can be found at
http://local.iteris.com/arc-it/ (34).
Intel® Xeon® Processors
CPUs that deliver high-performance in-vehicle compute for level 4 and 5 driving automation.
See also “In-Vehicle Compute” (7).
In-Vehicle Compute
Any or all computing systems inside the vehicle that power autonomous driving, advanced driver
assistance systems (ADAS), or in-vehicle experiences. See also “Application-Specific Integrated
Circuit (ASIC)”; “Central Processing Unit (CPU)”; “Field-Programmable Gate Array (FPGA)”;
“Graphics Processing Unit (GPU)”; “Intel Atom® Automotive Processors”; and “Intel® Xeon®
Processors” (7).
In-Vehicle Experiences (IVE)
The intuitive experiences inside the vehicle that provide driver assistance, information, and
entertainment, while often enhancing safety. These are delivered by a range of systems,
including in-vehicle infotainment (IVI), digital instrument clusters, and advanced driver
assistance systems (ADAS) (7).
In-Vehicle Infotainment (IVI)
A collection of hardware and software that provide entertainment in the vehicle; for example,
navigation systems, radio, video players, and Wi-Fi (7).

13
ITS Ad Hoc Domain
The ad hoc communications between different ITS stations such as those at the roadside and in
vehicles, using communications protocols such as 802.11p. It includes the necessary measures to
maintain privacy, security and trustworthiness in the communication (1).
ITS Station
A collection of functional components that participate in the provision of ITS services at a
particular location. Thus, an ITS Station may exist in a vehicle, at the roadside, in a central
location such as a TMC, or in a mobile device. Note that it has two meanings: (1) functional and
(2) physical, i.e. an actual physical device (1).
Levels of Driving Automation
The six levels of driving automation, defined in the “Standard J3016: Taxonomy and Definitions
for Terms Related to On-Road Motor Vehicle Automated Driving Systems” by the Society of
Automotive Engineers (SAE) (23). A summary table and more descriptions from the two-page
summary of SAE J3016 (24) are presented below.
A key distinction is between level 2, where the human driver performs part of the
dynamic driving task, and level 3, where the automated driving system performs the
entire dynamic driving task.
System refers to the driver assistance system, combination of driver assistance systems,
or automated driving system.
Some of key definitions in J3016 include:

14
o Dynamic driving task includes the operational (steering, braking, accelerating,
monitoring the vehicle and roadway) and tactical (responding to events,
determining when to change lanes, turn, use signals, etc.) aspects of the driving
task, but not the strategic (determining destinations and waypoints) aspect of the
driving task.
o Driving mode is a type of driving scenario with characteristic dynamic driving
task requirements (e.g., expressway merging, high speed cruising, low speed
traffic jam, closed-campus operations, etc.).
o Request to intervene is notification by the automated driving system to a human
driver that s/he should promptly begin or resume performance of the dynamic
driving task.
A couple of example applications are provided below to show how an application can evolve
through the levels of automation, exerted and modified from the “Automated and Autonomous
Driving” report (54).
Example 1: Driving Application
Level 1 (Driver Assistance) – Adaptive Cruise Control (ACC) including stop-and-go
function: Adaptive cruise control with stop and go function includes automatic distance
control and, within the limits of the system, detects a preceding vehicle. It maintains a
safe distance by automatically applying the brakes and accelerating. A driver still is
responsible for controlling the steering wheel.
Level 2 (Partial Automation) – Traffic Jam Assist: The system controls
forward/backward as well as sideways movements of the vehicle in order to follow traffic
flow. The system can be seen as an extension of the ACC with stop-and-go functionality,
with an addition of an automated lateral movement control. A driver does not have to
control the vehicle; but still must monitor the roadway and stay vigilant to the system and
be ready to take back control of the vehicle when requested by the system.
Level 3 (Conditional Automation) – Highway Chauffeur: Conditional automated
driving on motorways or motorway-like roads. The Highway Chauffeur operates from
entrance to exit, on all lanes, including overtaking movements. The driver must
deliberately activate the system and can override or switch off the system at all times. A
driver does not have to control the vehicle and does not have to monitor the roadway; but
must stay vigilant to the system and be ready to take back control of the vehicle when
requested by the system. There are no requests from the system to the driver to take over
when the system is in its normal operation but the system will request the driver to take
over within a specific time, if automation reaches the system limits.
Level 4 (High Automation) – Highway Pilot: Automated driving on motorways or
motorway-like roads, on all lanes, including overtaking movements. The driver must
deliberately activate the system and can override or switch off the system at all times. A
driver does not have to control the vehicle and does not have to monitor the roadway; but
must stay vigilant to the system and be ready to take back control of the vehicle when
requested by the system. However, in Level 4, the vehicle is supposed to be able to
respond to the situation even when a drive does not response appropriately. There are no
requests from the system to the driver to take over when the system is in its normal

15
operation but the system will request the driver to take over within a specific time, if
automation reaches the system limits.
Level 5 (Full Automation) – Fully automated private vehicle: The fully automated
vehicle should be able to handle all driving from point A to B, without any input from the
passenger. The driver can at all times override or switch off the system. No consensus
exists as to when such systems will become commercially available.
Example 2: Parking Application
Level 0 (No Automation) – Park Distance Control: The Park Distance Control system
assists the driver to manoeuvre into tight spaces and reduces stress by communicating
distance from obstacles by means of acoustic or, depending on vehicle, optical signals.
Note that no action is automated here. Rather the goal of the system is solely to provide
better information to drivers while they perform all of the parking task.
Level 1 (Driver Assistance) – Park Assist: The Park Assist function automatically
steers the car into parallel and bay parking spaces, and also out of parallel parking spaces.
The system assists the driver by automatically carrying out the optimum steering
movements in order to reverse-park on the ideal line. The measurement of the parking
space, the allocation of the starting position and the steering movements are
automatically undertaken by Park Assist – all the driver has to do is operate the
accelerator and the brake. This means that the driver retains control of the car at all times.
Level 2 (Partial Automation) – Park Assist: Partial automated parking into and out of a
parking space in a public or private parking area or garage. The process is initiated
remotely, e.g. via smartphone or adapted remote key. The vehicle carries out the
manoeuvre by itself. The driver can be located outside of the vehicle, but has to monitor
the system and can stop the parking manoeuvre if required.
Level 4 (High Automation) – Parking Garage Pilot: Highly automated parking
including manoeuvring to and from parking place (driverless valet parking). In parking
garages, the driver does not have to monitor the operation and may leave once the system
is active. The process is initiated remotely, for instance via a smartphone or an adapted
remote key.
Light Detection and Ranging (LIDAR)
An expensive, but extremely accurate technology, which is effectively a Laser based version of
Radar and used in autonomous vehicles. The LIDAR unit, usually sits on top of the vehicle roof
to enable unhindered 360-degree view of the area surrounding the vehicle. 64 lasers spin at about
900 rpm and create a detailed 360-degree 3D map of the surrounding environment in order to
view all obstacles in real time. This unit bounces laser beams off object surfaces up to 100m
around the autonomous vehicle and then builds a 3D picture from this raw data via the vehicles
microprocessor, to accurately determine the identity and distance of the object (3).
Light Emitting Diode (LED) Headlights
Headlights that use an array of LEDs to provide forward illumination. LED headlights provide a
“whiter” light than HID units, but they are more directional and typically produce less light
overall (6).
16
Local Coordination
An activity to instruct equipped vehicles, or streams of equipped vehicles, already on the
highway and within a certain distance of each other to speed up or slow down to facilitate
clustering. This local coordination effort helps creating a cluster to support CV applications such
as Cooperative Adaptive Cruise Control (CACC) (2). Also see “Ad Hoc Clustering”.
Long Term Evolution (LTE)
A mobile telephone standard that accelerates the expansion of mobile Internet use. LTE allows
data transfer rates of between 100 and 300 Mbps, and can be used to rapidly download HD
movies to a car’s infotainment system, for example – even while the vehicle is in motion (11).
Machine Learning
A subset of AI that gives machines the ability to learn on their own, resulting in algorithms that
make data-driven decisions (7).
Machine Vision
A technology used to provide imaging-based automatic inspection and analysis for such
applications as automated inspection, process control, and robot guidance, usually in industry.
Machine vision is a term encompassing a large number of technologies, software and hardware
products, integrated systems, actions, methods and expertise (45).
Mobility as a Service (MaaS)
The integration of various forms of transport services into a single mobility service accessible on
demand. To meet a customer’s request, a MaaS operator facilitates a diverse menu of transport
options such as public transport, ride-, car- or bike-sharing, taxi or car rental/lease, or a
combination thereof. For the user, MaaS can offer added value through use of a single
application to provide access to mobility, with a single payment channel instead of multiple
ticketing and payment operations (38).
Mobility Connection Protection (MCP)
An application providing passengers with real-time journey information across various transport
modes to allow them to more accurately predict whether they will make their next connection.
Travellers can use their mobile devices to make a request for a connection to wait. If multiple
people on a delayed transit vehicle will miss their next connection, transportation providers can
adjust departures to enable the passengers to make their next connection (3).
Natural Language Processing (NLP)
A form of AI that enables the vehicle to understand and respond to natural human speech (7).
The computer must recognize what language we are using and then interpret what we say into a
question it understands. It must then find the answer and then phrase the response in our
language. NLP is an area of artificial intelligence research that is attempting to do just that (25).
National Transportation Communications for ITS Protocol (NTCIP)
A family of standards that provides both the rules for communicating (called protocols) and the
vocabulary (called objects) necessary to allow electronic traffic control equipment from different
manufacturers to operate with each other as a system. The NTCIP is the first set of standards for
17
the transportation industry that allows traffic control systems to be built using a “mix and match”
approach with equipment from different manufacturers. Therefore, NTCIP standards reduce the
need for reliance on specific equipment vendors and customized one-of-a-kind software. To
assure both manufacturer and user community support, NTCIP is a joint product of the National
Electronics Manufacturers Association (NEMA), the American Association of State highway
and Transportation Officials (AASHTO), and the Institute of Transportation Engineers (ITE)
(46).
Object and Event Detection and Response
The detection by the driver or automated driving systems of any circumstance that is relevant to
the immediate driving task, as well as the implementation of the appropriate driver or system
response to such circumstance (42).
Obstacle Detection
An ADAS feature sensing slow-moving or stationary objects ahead of the vehicle, usually when
driving at low speeds, and alerting the driver with a flashing command to brake the vehicle,
along with an audible warning and/or a vibration at the steering wheel and/or in the driver’s seat
(3).
Operational Design Domain
A domain describing the specific conditions under which a given automated driving system or
feature is intended to function, in the automated driving environment. An area that is limited by
either geography or operating conditions under which a vehicle or autonomous features may be
intended to work. Examples include Freeways, downtown areas, roadways with speed limits <
35 mph (42).
Original Equipment (OE)
Components used to build the vehicle at the factory or are available as service replacements
through franchised dealers (6).
Original Equipment Manufacturer (OEM)
A company that produces hardware to be marketed under another company's brand name. For
example, if Samsung makes a monitor that will be marketed by Dell, a "Dell" label will get stuck
on the front, but the OEM of the monitor is Samsung (26).
On-Board Equipment (OBE)
A piece of ITS related hardware that is located in a vehicle to collect data from the vehicle and/or
provide an interface through which ITS services can be provided, e.g. tolls, navigation, trip
planning, travel information (1).
On-Board Diagnostics (OBD)
A built-in diagnostic system on all newer vehicles that monitors vehicle emissions control
systems for proper operation. Problems that cause an increase in emissions will illuminate the
“check engine” Malfunction Indicator Light (MIL) on the dash. The OBD system also provides a
standardized Diagnostic Link Connector (DLC) for attaching diagnostic tools to the vehicle (6).
18
Opt-In Services
Services that can be provided only when a user opts in. A connected vehicle may require a user
to opt-in prior to transmitting any ‘sensitive’ data. Each opt-in prompt shall provide the user with
a full description of the data that may potentially be transmitted if the user agrees to the option
(5).
Over-the-Air (OTA) Update:
Software or firmware updates to a vehicle that are downloaded from the cloud (7). Connected
vehicles are increasingly enabled to receive remote OTA software updates and transmit
diagnostic and operational data from on-board systems and components. By leveraging vehicle
connectivity in this way automakers can significantly reduce recall expenses, improve
cybersecurity response time, increase product quality and operational efficiency (27).
Park Assist
A system of ultrasonic sensors on the front and/or rear bumpers that provide the driver with
visual, audible and/or tactile alerts as their vehicle approaches a stationary object (6). Most
manufacturers are incorporating this feature into vehicles that perform self-parallel parking.
Perception (sense)
The first of the three stages of in-vehicle compute required for autonomous driving (sense, fuse,
decide). In this stage, the vehicle collects data from dozens of sensors, including LIDAR, radar,
and cameras (7).
Platooning
A method of grouping vehicles together, primarily to increase the road capacity, which will lead
up to fully automated vehicles on a wide scale. Platooning will decrease the distances between
cars or trucks and would allow vehicles to accelerate or brake simultaneously. This method also
allows for a closer headway between vehicles by eliminating reacting distance needed for human
reaction (28). Smart cars (e.g. autonomous vehicles) with artificial intelligence could
automatically join and leave platoons (3).
Privacy
The ability of an individual or group to seclude themselves or seclude information about
themselves, thereby revealing themselves selectively (1). Privacy is considered a huge concern
with connected vehicle operation since a lot of communication takes place in an environment
that may risk the privacy of users.
Rain-Sensing Wipers
Windshield wipers whose rate of operation is electronically controlled based on the amount of
moisture on the windshield (6).
Rear View Camera
A camera mounted at the back of a vehicle that displays a picture on a screen in the dash or rear-
view mirror of what is behind the vehicle when the transmission is in reverse (6).
19
Real Time Data (RTD)
Data that are collected continuously and made available for immediate processing. Vehicle RTD
includes information about vehicles such as current fuel consumption, braking behavior and
temperature, and information on the current level of traffic or the state of the road ahead (11).
Real Time Kinematics (RTK)
A differential global navigation satellite system (GNSS) technique which provides high
positioning performance in the vicinity of a base station. The technique is based on the use of
carrier measurements and the transmission of corrections from the base station, whose location is
well known, to the rover, so that the main errors that drive the stand-alone positioning cancel out.
A RTK base station covers a service area spreading about 10 or 20 kilometers and a real-time
communication channel is needed connecting base and rover. RTK, which achieves
performances in the range of a few centimeters, is a technique commonly used in surveying
applications (44).
Real Time Traffic Information (RTTI)
A service that provides drivers with information about the current state of traffic in a road
network. It is updated to show how conditions are changing and may apply to all or part(s) of the
road network (1).
Reinforcement Learning
An area of machine learning inspired by behaviorist psychology, concerned with how software
agent ought to take actions in an environment so as to maximize some notion of cumulative
reward. Reinforcement learning differs from standard supervised learning in that correct
input/output pairs are never presented, nor sub-optimal actions explicitly corrected (41).
Retrofit Device
A component that has been installed after a vehicle or part of the transport infrastructure was
constructed. To retrofit is to install on-board equipment into existing vehicles for communication
with other vehicles, the infrastructure or portable communication devices. Retrofits are done with
the involvement of the vehicle manufacturer, as contrasted with aftermarket modifications,
which do not involve the vehicle manufacturer. Retrofitted devices, therefore, can access
proprietary vehicle-based data (1).
Roadside Equipment (RSE)
A piece of ITS related hardware located at the side of the road, exchanging data with vehicles in
its locality and in some instances, providing an interface through which travelers can access ITS
related services, e.g. Public Transport schedules (1). The term Roadside Equipment (RSE) has
been used to describe a broader set of field equipment, incorporating the narrowly-defined RSU
and other functional components such as applications. See also “Roadside Unit”.
Roadside Unit (RSU)
A DSRC transceiver that is mounted along a road or pedestrian passageway. An RSU may also
be mounted on a vehicle or is hand carried, but it may only operate when the vehicle or hand
carried unit is stationary. Furthermore, an RSU operating under this part is restricted to the
location where it is licensed to operate. However, portable or hand-held RSUs are permitted to
20
operate where they do not interfere with a site licensed operation. A RSU broadcasts data to
OBUs or exchanges data with OBUs in its communications zone. An RSU also provides channel
assignments and operating instructions to OBUs in its communications zone, when required (5).
See also “Roadside Equipment”.
Security Credential Management System (SCMS)
Security system for cooperative vehicle-to-vehicle crash avoidance applications using 5.9 GHz
DSRC wireless communications (5).
Self-Driving Vehicle
See “Terminologies for a Vehicle with Automation Capability” and “Levels of Driving
Automation”.
Sensor Fusion (fuse)
The second of the three stages of in-vehicle compute required for autonomous driving (sense,
fuse, decide). In this stage, the vehicle correlates and fuses sensor data to create a model of its
environment (7).
Signal Phase and Timing (SPaT)
The signal state of the intersection and how long this state will persist for each approach and lane
that is active, according to the SPaT Benefits Report. The SPaT message sends the current state
of each phase, with all-red intervals not transmitted. Movements are given to specific lanes and
approaches by use of the lane numbers present in the message. In a connected vehicle
environment, the message is sent from the roadway infrastructure to approaching vehicles (1).
Smart Park
A United States Department of Transportation (USDOT) Federal Motor Carriers Safety
Administration (FMCSA) (8) (29) project to demonstrate technology for conveying real-time
information on parking availability to truckers on the road (1).
Social Equity
The situation in which all people within a society or group have the same status with respect to
access to and use of CV technology and products (5).
Software Development Kit (SDK)
A set of tools—such as performance libraries, leading compilers, performance and power
analyzers, and debuggers—that speeds the time it takes for developers to build software (7).
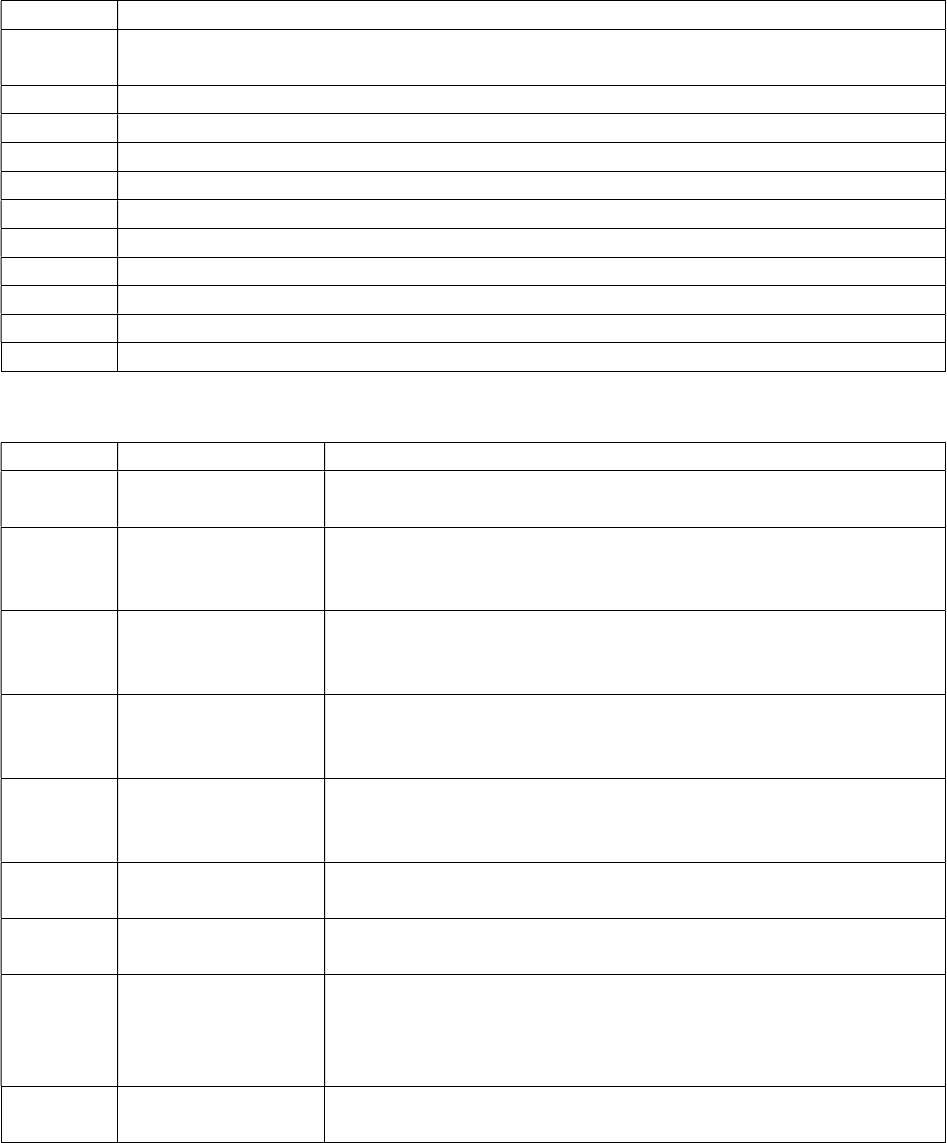
Standard Message Sets
A set of messages which are the primary means by which vehicles communicate with each other
and with the roadway infrastructure. Two of the representative standard message sets are SAE
J2735 and SAE J2945, defined by the Society of Automotive Engineers (SAE) (47). J2735
defines format and structure of message, data frames and data elements for exchanging V2V and
V2I information while J2945 describes use cases and performance requirements for J2735
messages (48). Please see “Table 2 SAE J2945 Standard Message Set” and “Table 3 SAE J2735
Standard Message Set” in the appendix for details.

21
Telematics
A multi-discipline term, encompassing telecommunications, vehicular technologies, road
transportation, road safety, electrical/electronic engineering, multimedia, wireless and Internet
technologies. Telematics can involve sending, receiving and storing information via telecom
devices, to enable control of remote objects. Vehicle Telematics, (which is most Telematics
usage today) specifically defines the use of such systems within road vehicles, including GPS
navigation, integrated hands-free cell phones, wireless safety communications and ADAS (3).
Terminologies for a Vehicle with Automation Capability
The terminologies that have been widely used to call a vehicle with the automation capability.
These are an automated vehicle, an autonomous vehicle, a self-driving vehicle, and a driverless
vehicle. It should be noted that some people use these terminologies interchangeably without any
clear distinctions while other people attempt to differentiate the terminologies and use a specific
term over the other. One of the example comparisons of these four terminologies is provided
below:
“Today, most people use the terms Autonomous, Automated, Self-Driving, and
Driverless as interchangeable. Yet some people in the field make a point of the
differences. If I understand these differences correctly, a self-driving car is not as
advanced as driverless, in that driverless doesn’t have the back-up of a person taking
control, and self-driving might. Driverless taxis are not merely self-driving, they pick up
passengers and may be personless. In SAE terms, driverless is Level 5, while self-driving
is Level 4 or below. Generally, the difference between automatic (or automated) and
autonomous is the degree of human intervention. An automated car does not have the
level of intelligence or independence that an autonomous car has. So driverless and
autonomous are nearer to synonyms, as are self-driving and automated. A truly
autonomous car would decide on destination and route as well as control within the lanes.
An automated car would follow orders about destination and route, and may only adopt
some lane-keeping or car-following guidance (55).”
Given that there is no consensus on the definitions of these terminologies as of now, a few
example definitions from the existing source are provided below.
Automated Vehicle:
o A vehicle in which at least some aspects of a safety-critical control function (e.g.,
steering, throttle, or braking) occur without direct driver input. Vehicles that
provide safety warnings to drivers (forward crash warning, for example) but do
not perform a control function are, in this context, not considered automated, even
though the technology necessary to provide that warning involves varying degrees
of automation (e.g., the necessary data are received and processed, and the
warning is given, without driver input). Automated vehicles may use onboard
sensors, cameras, GPS, and telecommunications to obtain information in order to
make their own judgments regarding safety-critical situations and act
appropriately by effectuating control at some level (57).
Self-Driving Vehicle:
o A vehicle having the ability to drive by itself using onboard sensors, without the
need of any intervention from human driver (3).

22
o A self-driving car is not as advanced as driverless, in that driverless doesn’t have
the back-up of a person taking control, and self-driving might. Driverless taxis are
not merely self-driving, they pick up passengers and may be personless. In SAE
terms, driverless is Level 5, while self-driving is Level 4 or below (55).
Autonomous Vehicle:
o A vehicle that is capable of sensing its environment and navigating without
human input. A human may select a destination but is not required to
mechanically operate the vehicle. Autonomous vehicles sense their surroundings
with such techniques as radar, LIDAR, GPS technology, or computer vision.
Advanced control systems on board the vehicle then interpret the sensor
information to identify the appropriate navigation paths and obstacles and
interpret the relevant signs (56). Given that driverless and autonomous are nearer
to synonyms, autonomous is Level 5 in SAE terms (55).
o A vehicle in which vehicle operation occurs without direct human driver input to
control key functions such as steering, acceleration, and braking. There are
various degrees of autonomy, but future systems will be principally designed so
that the vehicle's passenger is not required to monitor the roadway or intervene in
the operation of the vehicles in any way (3).
Driverless Vehicle:
o A driverless car (sometimes called a self-driving car, an automated car or
an autonomous vehicle) is a robotic vehicle that is designed to travel between
destinations without a human operator. To qualify as fully autonomous, a vehicle
must be able to navigate without human intervention to a predetermined
destination over roads that have not been adapted for its use (53).
Traction Control System (TCS)
A system that uses the ABS components to limit wheel spin when accelerating on slippery
surfaces. More advanced systems can also retard engine spark timing and automatically back off
the throttle when necessary to control wheel spin (6).
Transit Signal Priority (TSP)
A signal system that allows transit agencies to manage service by granting bus right of way at a
traffic signal based on a number of factors, such as schedule adherence or passenger loads (30),
(31), (32).
An operational strategy that facilitates the movement of transit vehicles, either buses or
streetcars, through traffic-signal controlled intersections. Objectives of TSP include improved
schedule adherence and improved transit travel time efficiency while minimizing impacts to
normal traffic operations e trips by providing travelers with choices relative to route, time, and
mode (52).
Vehicle Application
A software program with an interface that provides functionality enabling people to realize
safety, mobility, environmental, or other benefits (5)(4). The term “app” applies in general to any
form of application software. Nowadays, however, it is used mostly to refer to applications for
smartphones and tablet computers, which are acquired from an online shop integrated into the
23
operating system and can therefore be installed directly on the smartphone. In the automotive
context, there are apps for motorists to aid navigation or display parking ticket vending
machines, for example (11).
Vehicle to Infrastructure (V2I) Communication
A communication that promotes the exchange of information between the vehicles and the
infrastructure (11).
Vehicle to Vehicle (V2V) Communication
A communication that promotes the exchange of information between vehicles (11).
Vehicle to X (V2X) Communication
Pronounced “vehicle to many”, a communication that promotes the exchange of information
between the vehicles and various counterparts including other means of transport, the
infrastructure, traffic management centers and various Internet applications (11).
A communication allowing the car to communicate with various, non-vehicle located, smart
enabled road infrastructure, such as electronics built in to traffic signals, stoplights, speed signs,
bollards, barriers, message boards etc. (3).
Vision Processing
The technologies used to provide image-based analysis (also called machine vision) (7).
Computer vision processing provides quantitative and qualitative information from visual data.
Much like the process of visual reasoning of human vision; it can distinguish between objects,
classify them, sort them according to their size, and so forth. Computer vision, like image
processing, takes images as input. However, it returns another type of output, namely
information on size, color, number, etc. In general, image processing methods are harnessed for
achieving tasks of computer vision (33).
Wireless Access for Vehicular Environments (WAVE)
A vehicular communication system that was an amendment to the existing IEEE 802.11 wireless
standard that adds wireless access in vehicular environments, known as WAVE. IEEE802.11p
lays down certain enhancements to the existing wireless 802.11 to enable support of Intelligent
Transportation Systems (ITS) applications. This support includes the exchange of data between
vehicle to vehicle and also vehicle to infrastructure, known as V2V and V2X, which will be vital
data resources in the Autonomous driving era (3).
Wireless Local Area Network (WLAN)
A local radio network usually operating to a specification from the IEEE-802.11 family. In some
countries, the term Wi-Fi is commonly used for this narrower meaning, although it is frequently
regarded as synonymous (11).

24
REFERENCES
1. USDOT. Glossary of Terms for Connected Vehicles 2009 to Present.
http://connectedvehicle.itsa.wikispaces.net/Glossary+of+Terms+for+EU-
US+cooperation+in+ITS#x-Glossary of Terms for EU-US Cooperation, 2009-Present-
Version 7, 2012. Accessed Jan. 1, 2017.
2. Shladover, S. E., R. F. Station, and X. Lu. Cooperative Adaptive Cruise Control
Definitions and Operating Concepts. Journal of Transportatation Research Record, Vol.
2489, 2015, pp. 1–16. https://doi.org/https://doi.org/10.3141/2489-17.
3. Driverless.global. Terms for Driverless Vehicle Systems.
http://www.driverless.global/glossary. Accessed Jan. 1, 2017.
4. USDOT. Intelligent Transportation Systems ePrimer. United States Department of
Transportation, 2013.
5. FHWA. Connected Vehicle Terms OSADP.
https://www.itsforge.net/index.php/information/glossary-of-terms. Accessed Jan. 1, 2017.
6. AAA. Automotive Glossary.
https://www.aaa.com/AAA/common/AAR/files/Automotive-Glossary.docx.
7. Intel. Autonomous Driving Glossary. https://newsroom.intel.com/wp-
content/uploads/sites/11/2017/05/Autonomous-Driving-Glossary.pdf.
8. USDOT. National Highway Traffic Safety Administration. https://www.nhtsa.gov/.
Accessed Aug. 24, 2017.
9. Safecar.go. Automated Emergency Braking. National Highway Traffic Safety
Administration. https://www.safercar.gov/Vehicle-Shoppers/Safety-
Technology/AEB/aeb. Accessed Aug. 23, 2017.
10. Liu, J., and A. J. Khattak. Delivering Improved Alerts, Warnings, and Control Assistance
Using Basic Safety Messages Transmitted between Connected Vehicles. Transportation
Research Part C: Emerging Technologies, Vol. 68, 2016, pp. 83–100.
https://doi.org/10.1016/j.trc.2016.03.009.
11. IAAA. Connected Car Glossary. http://www.connectedcarguide.com/en/glossary.
Accessed Jul. 8, 2017.
12. Azure, M. Cloud Computing Terms. https://azure.microsoft.com/en-us/overview/cloud-
computing-dictionary/. Accessed Jan. 1, 2017.
13. Azure, M. Computer Vision API. https://azure.microsoft.com/en-us/services/cognitive-
services/computer-vision/. Accessed Aug. 30, 2017.
14. Neudorff, L. G., J. Mason, and J. Bauer. Glossary of Regional Transportation Systems
Management and Operations Terms. Transportation Research Board 500 Fifth Street,
NW Washington, DC 20001. August 2012. 1–29.
http://onlinepubs.trb.org/onlinepubs/circulars/ec166.pdf.
15. USDOT. Connected Vehicle Basics.
https://www.its.dot.gov/cv_basics/cv_basics_what.htm. Accessed Aug. 30, 2017.
16. CAAT. Connected and Automated Vehicles. Center for Advanced Automotive Research.
http://autocaat.org/Technologies/Automated_and_Connected_Vehicles/. Accessed Aug.
30, 2017.
17. Trabalza, D., S. Raza, and T. Voigt. Wireless Sensor Networks for Developing Countries.
Communications in Computer and Information Science, Vol. 366, No. April, 2013, pp.
108–119. https://doi.org/10.1007/978-3-642-41054-3.
25
18. ETSI-TS. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of
Applications; Part 2: Specification of Cooperative Awareness Basic Service, Technical
Specification (March 2011).
http://www.etsi.org/deliver/etsi_ts/102600_102699/10263702/01.02.01_60/ts_10263702v
010201p.pdf. Accessed Aug. 26, 2017.
19. Argote-Cabañero, J., E. Christofa, and A. Skabardonis. Connected Vehicle Penetration
Rate for Estimation of Arterial Measures of Effectiveness. Transportation Research Part
C: Emerging Technologies, Vol. 60, 2015, pp. 298–312.
https://doi.org/10.1016/j.trc.2015.08.013.
20. Pfoser, D. Floating Car Data. Encyclopedia of GIS, 2008, pp. 321–323.
https://doi.org/10.1007/978-0-387-35973-1_423.USDOT.
21. Opto-22. Internet of Things - Glossary of Terms. http://info.opto22.com/internet-of-
things-glossary-of-terms. Accessed Aug. 30, 2017.
22. USDOT. ITS Research 2015-2019 Interoperability. Intelligent Transportation Systems
Joint Office. https://www.its.dot.gov/research_areas/interoperability.htm. Accessed Aug.
30, 2017.
23. SAE International. Standard SAE J3016: Taxonomy and Definitions for Terms Related to
On-Road Motor Vehicle Automated Driving Systems. 2016.
24. SAE International. Automative Driving: Levels of Driving Automation. A two-page
summary of SAE J3016.
http://media.cygnus.com/files/base/MASS/document/2017/04/automated_driving.pdf.
Accessed Jan. 1, 2018.
25. Stanford. SKIL Glossary. https://web.stanford.edu/group/vpue/skil/glossary/natlang.htm.
Accessed Aug. 30, 2017.
26. TechTerms. Technical Term Definitions. https://techterms.com/definition/oem. Accessed
Aug. 26, 2017.
27. Airbiquity. OTA Software and Data Management. https://www.airbiquity.com/product-
offerings/software-and-data-management. Accessed Aug. 26, 2017.
28. ACEA. Truck Platooning. European Automobile Manufacturers Association.
https://www.acea.be/uploads/publications/Platooning_roadmap.pdf. Accessed Aug. 26,
2017.
29. USDOT. Federal Motor Carrier Safety Administration. https://www.fmcsa.dot.gov/.
Accessed Aug. 26, 2017.
30. Toyota. Introduction to Electronic Signals. Electronic Circuit Diagnostics.
http://www.autoshop101.com/forms/elec06.pdf. Accessed Aug. 26, 2017.
31. USDOT. Manual on Uniform Traffic Control Devices. Federal Highway Administration.
https://mutcd.fhwa.dot.gov/pdfs/2009r1r2/mutcd2009r1r2edition.pdf.
32. USDOT. Traffic Signals. Brief Issue on Safe Roads.
https://safety.fhwa.dot.gov/intersection/other_topics/fhwasa09027/resources/Intersection
Safety Issue Brief 5.pdf. Accessed Aug. 23, 2017.
33. Vision, R. Difference Between Computer Vision, Image Processing and Machine
Learning. http://www.rsipvision.com/defining-borders/. Accessed Aug. 25, 2017.
34. USDOT. Architecture Reference for Cooperative and Intelligent Transportation.
http://local.iteris.com/arc-it/. Accessed Aug. 30, 2017.
35. USDOT. Concept Development and Needs Identification for Intelligent Network Flow
Optimization (INFLO). Research and Technology Development Organization, United

26
States Department of Transportation, 2012.
36. USDOT. Intelligent Transportation Systems Joint Program Office Mobility Research
Archive. https://www.its.dot.gov/research_archives/dma/dma_development.htm.
Accessed Aug. 30, 2017.
37. Techopedia. Application-Specific Integrated Circuit.
https://www.techopedia.com/definition/2357/application-specific-integrated-circuit-asic.
Accessed Aug 30, 2017.
38. Mobility as a Service Alliance Website. https://maas-alliance.eu/homepage/what-is-
maas/. Accessed Sept 18, 2017
39. USDOT. Federal Automated Vehicles Policy. September 2016.
40. De Mauro, Andrea; Greco, Marco; Grimaldi, Michele (2016). A Formal definition of Big
Data based on its essential Features. Library Review. 65: 122–135. doi:10.1108/LR-06-
2015-0061
41. Reinforcement Learning Wikipedia Website.
https://en.wikipedia.org/wiki/Reinforcement_learning. Accessed October 13, 2017.
42. USDOT. Automated Driving Systems: A Vision for Safety. September 2017.
43. Automated Driving System Wikipedia Website.
https://en.wikipedia.org/wiki/Automated_driving_system. Accessed October 13, 2017.
44. RTK Standards Navipedia. http://www.navipedia.net/index.php/RTK_Standards.
Accessed October 13, 2017.
45. Machine Vision Wikipedia Website. https://en.wikipedia.org/wiki/Machine_vision.
Accessed October 13, 2017.
46. NTCIP. Background Information. https://www.ntcip.org/info/. Accessed October 13,
2017.
47. Jim Misener. SAE Connected Vehicle Standards. SAE International.
http://www.sae.org/events/ces/2016/attend/program/presentations/misener.pdf. Accessed
Oct 27, 2017.
48. Frank Perry. Overview of DSRC Messages and Performance Requirements.
http://www.transportation.institute.ufl.edu/wp-content/uploads/2017/04/HNTB-SAE-
Standards.pdf. Accessed Oct 27, 2017.
49. Sdx. What is Cloud? https://www.sdxcentral.com/cloud/definitions/what-is-cloud/.
Accessed: Oct, 27, 2017
50. Rouse, M. Cybersecurity. http://whatis.techtarget.com/definition/cybersecurity.
Accessed: Oct, 28, 2017
51. Richard Deering. Crash Avoidance Metrics Partnership. National Highway Traffic Safety
Administration. 2002
52. Glossary. National Operations Center of Excellence.
https://transportationops.org//resources/glossary. Accessed: Nov, 21, 2017
53. TechTarget. Driverless Car. http://whatis.techtarget.com/definition/driverless-car.
Accessed: January 2018
54. International Transport Forum of OECD. Automated and Autonomous Driving. 2015.
https://cyberlaw.stanford.edu/files/publication/files/15CPB_AutonomousDriving.pdf
55. David Levinson. On the Differences between Autonomous, Automated, Self-Driving, and
Driverless Cars. https://transportist.org/2017/06/29/on-the-differences-between-
autonomous-automated-self-driving-and-driverless-cars/. Accessed: February 2018.
56. ITS Professional Capacity Building Program of USDOT. ITS ePrimer – Module 13:

27
Connected Vehicles. https://www.pcb.its.dot.gov/eprimer/module13.aspx. Accessed:
February 2018.
57. USDOT, NHTSA. Preliminary Statement of Policy Concerning Automated Vehicles.
2016. https://www.nhtsa.gov/staticfiles/rulemaking/pdf/Autonomous-Vehicles-Policy-
Update-2016.pdf. Accessed: February 2018.
28
APPENDIX
Table 3 SAE J2945 Standard Message Set (47) (48)
Message Attributes
J2945/0 Common Requirements for (DSRC) Minimum Performance (also called “base” or
“slash zero”)
J2945/1 On-board Minimum Performance Requirements for V2V Safety Systems
J2945/2 DSRC Requirements for V2V Safety Awareness
J2945/3 Weather and Road Reporting
J2945/4 Requirement for TIM
J2945/5 Mayday System Requirements
J2945/6 Performance Requirements for Coordinated Maneuvers (Platooning and CACC)
J2945/7 Performance Requirements for Transit Systems
J2945/8 Performance Requirements for Freight Systems
J2945/9 Performance Requirements for Safety Communications to Vulnerable Road Users
J2945/10 System Requirements and Guidance for using SPaT and MAP messages
Table 4 SAE JS2735 Standard Message Set (47) (48)
Message Name Attributes
#18 MAP Provides intersection and roadway lane geometry data for one
or more locations (e.g. intersections and fragments of maps).
#19 Signal Phasing and
Timing (SPaT)
Provides the current signal / phase timing data (times at which
signals will change) for one or more signalized intersections,
as well as other time of day status details.
#20 Basic Safety
Message (BSM)
Core V2V Safety Message Broadcast by vehicles to provide
situational data (location, heading, speed, etc.) to surrounding
vehicles, used to assess threat potentials
#21 Personal Safety
Message (PSM)
Broadcast by Vulnerable Road User (VRU) devices to announ
ce
their presence to approaching vehicles
#25 Probe Data
Management
Broadcast by RSUs to instruct vehicles to adjust data (snapsh
ot)
collection thresholds and/or transmission strategy
#30 Signal Status
Message (SSM)
Broadcast by RSUs to announce pending Priority/Preemption
requests
#29 Signal Request
Message (SRM)
Broadcast by vehicles to request Priority/Pre‐emption
#31 Traveler
Information
Message (TIM)
The TIM message contains a variety of traffic condition and
“advanced traveler” messages. It provides the means to
inform the public about both incidents (traffic accidents) and
pre-planned roadwork events.
#33 Basic Information
Message (BIM)
Under Development and may replace the TIM

29
Table 5 Various Related Associations
Association Role
International Transportation Safety Association
(ITSA)
(https://itsasafety.org/)
Founded on the notion that independent
non-judicial investigations of
transportation accidents contribute
significantly to the safety of the traveling
public
Transportation Intermediaries Association (TIA)
(http://www.tianet.org/)
Act as a facilitator to arrange the
efficient and economical movement of
goods. They serve tens of thousands of
shippers and carriers, bringing together
the transportation needs of the cargo
interests with the corresponding capacity
and special equipment offered by rail,
motor, air, and ocean carriers.
Advanced Transit Association (Atra)
(http://www.advancedtransit.org/)
Aims at increasing the knowledge and
understanding of innovative transit
concepts.
American Association of State Highway and
Transportation Officials (AASHTO)
(https://www.transportation.org/home/organization/)
AASHTO works to educate the public
and key decision makers about the
critical role that transportation plays in
securing a good quality of life and sound
economy for our nation.
American Public Transportation Association
(APTA)
(http://www.apta.com/Pages/default.aspx)
To strengthen and improve public
transportation, APTA serves and leads
its diverse membership through
advocacy, innovation and information
sharing.
American Association of Airport Executives
(AAAE)
(https://www.aaae.org/)
Represents thousands of airport
management personnel at public-use
commercial and general aviation
airports.
National Industrial Transportation League (NITL)
(http://www.nitl.org/about-nitl/)
Work towards shippers’ interests for all
types of freight transportation systems
