
Report No. K-TRAN: KU-19-2 ▪ FINAL REPORT ▪ January 2021
Effectiveness of Entertaining, Non-
Traffic-Related Messages on Dynamic
Message Signs
Alexandra Kondyli, Ph.D.
Steven D. Schrock, Ph.D, P.E., F.ITE
Irtiza Rafid Khan
The University of Kansas

i
1 Report No.
K-TRAN: KU-19-2
2 Government Accession No.
3 Recipient Catalog No.
4 Title and Subtitle
Effectiveness of Entertaining, Non-Traffic-Related Messages on Dynamic
Message Signs
5 Report Date
January 2021
6 Performing Organization Code
7 Author(s)
Alexandra Kondyli, Ph.D.
Steven D. Schrock, Ph.D, P.E., F.ITE
Irtiza Rafid Khan
8 Performing Organization Report
No.
9 Performing Organization Name and Address
The University of Kansas
Department of Civil, Environmental & Architectural Engineering
1530 West 15th St
Lawrence, Kansas 66045-7609
10 Work Unit No. (TRAIS)
11 Contract or Grant No.
C2123
12 Sponsoring Agency Name and Address
Kansas Department of Transportation
Bureau of Research
2300 SW Van Buren
Topeka, Kansas 66611-1195
13 Type of Report and Period
Covered
Final Report
August 2018–January 2020
14 Sponsoring Agency Code
RE-0753-01
15 Supplementary Notes
For more information write to address in block 9.
16 Abstract
This research used a fixed-base driving simulator to determine the effects of dynamic message signs
(DMSs) on driver behavior. A DMS notifies drivers with safety, weather, incident, or traffic condition messages.
Recently, however, state Departments of Transportation (DOTs) display safety messages with entertaining
content. The Kansas DOT (KDOT) wanted to assess how these entertaining messages affect driving behavior.
Therefore, this research evaluated the effect of DMS content on driver behavior using a combination of surveys
and driver behavior data obtained from a fixed-base driving simulator.
Existing literature was reviewed to determine similar studies. Based on the literature, which included
results of DMS modeling in driving simulators and DMS effects on driver behavior, a research methodology was
developed. One hundred participants were recruited and screened using an online survey questionnaire that
included messages currently displayed on DMS; feedback on their perceived effectiveness was requested. The
second data collection was done via a driving simulator experiment. The simulator was prepared for the study, the
DMS was set, and events were designed to capture changes in driver behavior and awareness. A total of 60
participants with diverse demographics drove by several DMSs that displayed a variety of messages. Participants
completed a survey at the end of the experiment, and their responses were compared to responses of the online
survey. Behavioral data (speeds, accelerations, gazes, etc.) were then reduced, and statistical analyses were
performed, including hypothesis testing and analysis of variance, to evaluate to what extent the message content
affected driver behavior. The study identified potential messages that were found to effectively affect driver
behavior.
17 Key Words
Dynamic Message Signs, Driver Behavior, Questionn
aires,
Variable Message Signs, Digital Simulation
18 Distribution Statement
No restrictions. This document is available to the public
through the National Technical Information Service
www.ntis.gov.
19 Security Classification
(of this report)
Unclassified
20 Security Classification
(of this page)
Unclassified
21 No. of pages
66
22 Price
Form DOT F 1700.7 (8-72)
ii
This page intentionally left blank.
iii
Effectiveness of Entertaining, Non-Traffic-Related
Messages on Dynamic Message Signs
Final Report
Prepared by
Alexandra Kondyli, Ph.D.
Steven D. Schrock, Ph.D, P.E., F.ITE
Irtiza Rafid Khan
The University of Kansas
A Report on Research Sponsored by
THE KANSAS DEPARTMENT OF TRANSPORTATION
TOPEKA, KANSAS
and
THE UNIVERSITY OF KANSAS
LAWRENCE, KANSAS
January 2021
© Copyright 2021, Kansas Department of Transportation
iv
PREFACE
The Kansas Department of Transportation’s (KDOT) Kansas Transportation Research and New-
Developments (K-TRAN) Research Program funded this research project. It is an ongoing,
cooperative and comprehensive research program addressing transportation needs of the state of
Kansas utilizing academic and research resources from KDOT, Kansas State University and the
University of Kansas. Transportation professionals in KDOT and the universities jointly develop
the projects included in the research program.
NOTICE
The authors and the state of Kansas do not endorse products or manufacturers. Trade and
manufacturers names appear herein solely because they are considered essential to the object of
this report.
This information is available in alternative accessible formats. To obtain an alternative format,
contact the Office of Public Affairs, Kansas Department of Transportation, 700 SW Harrison, 2
nd
Floor – West Wing, Topeka, Kansas 66603-3745 or phone (785) 296-3585 (Voice) (TDD).
DISCLAIMER
The contents of this report reflect the views of the authors who are responsible for the facts and
accuracy of the data presented herein. The contents do not necessarily reflect the views or the
policies of the state of Kansas. This report does not constitute a standard, specification or
regulation.
v
Abstract
This research used a fixed-base driving simulator to determine the effects of dynamic
message signs (DMSs) on driver behavior. A DMS notifies drivers with safety, weather, incident,
or traffic condition messages. Recently, however, state Departments of Transportation (DOTs)
display safety messages with entertaining content. The Kansas DOT (KDOT) wanted to assess
how these entertaining messages affect driving behavior. Therefore, this research evaluated the
effect of DMS content on driver behavior using a combination of surveys and driver behavior data
obtained from a fixed-base driving simulator.
Existing literature was reviewed to determine similar studies. Based on the literature, which
included results of DMS modeling in driving simulators and DMS effects on driver behavior, a
research methodology was developed. One hundred participants were recruited and screened using
an online survey questionnaire that included messages currently displayed on DMS; feedback on
their perceived effectiveness was requested. The second data collection was done via a driving
simulator experiment. The simulator was prepared for the study, the DMS was set, and events were
designed to capture changes in driver behavior and awareness. A total of 60 participants with
diverse demographics drove by several DMSs that displayed a variety of messages. Participants
completed a survey at the end of the experiment, and their responses were compared to responses
of the online survey. Behavioral data (speeds, accelerations, gazes, etc.) were then reduced, and
statistical analyses were performed, including hypothesis testing and analysis of variance, to
evaluate to what extent the message content affected driver behavior. The study identified potential
messages that were found to effectively affect driver behavior.
vi
Acknowledgments
The authors of this report thank KDOT project monitor Chris Bortz for his guidance and
suggestions.
vii
Table of Contents
Abstract ......................................................................................................................................v
Acknowledgments ..................................................................................................................... vi
Table of Contents ..................................................................................................................... vii
List of Tables ............................................................................................................................ ix
List of Figures ........................................................................................................................... xi
Chapter 1: Introduction ...............................................................................................................1
1.1 Background .......................................................................................................................1
1.2 Objectives ..........................................................................................................................1
Chapter 2: Review of Current Practice ........................................................................................2
2.1 Effect of DMS Messages on Driver Behavior.....................................................................2
2.2 Mechanics of Driving Simulators .......................................................................................5
Chapter 3: Methodology ..............................................................................................................8
3.1 Online and Simulator Surveys ............................................................................................9
3.2 Driving Simulator Experiment ......................................................................................... 10
3.2.1 Participation Recruitment .......................................................................................... 11
3.2.2 Designing Roadway Geometry .................................................................................. 11
3.2.3 Experiment Procedure ............................................................................................... 12
3.2.4 Pilot Testing .............................................................................................................. 15
3.2.5 Data Collection, Reduction, and Statistical Analysis .................................................. 15
Chapter 4: Survey Data Analysis ............................................................................................... 17
4.1 Driving Simulator Survey Data Analysis.......................................................................... 17
4.1.1 Awareness of DMS Messages ................................................................................... 17
4.1.2 Uses of DMS ............................................................................................................. 18
4.1.3 Display of Road Safety Messages .............................................................................. 18
4.1.4 Driver Perception of DMS Messages ......................................................................... 19
4.2 Online Survey Data Analysis ........................................................................................... 23
4.2.1 Awareness of DMS Messages ................................................................................... 23
4.2.2 Uses of DMS ............................................................................................................. 24
4.2.3 Display of Road Safety Messages .............................................................................. 24
viii
4.2.4 Driver Perception of DMS Messages ......................................................................... 26
4.3. Combined Analysis ......................................................................................................... 29
Chapter 5: Driver Behavior Data Analysis ................................................................................. 32
5.1 Speeding Messages .......................................................................................................... 32
5.1.1 “Slow Down” Message .............................................................................................. 32
5.2 Car-Following Event ........................................................................................................ 36
5.3 Move-Over Law .............................................................................................................. 39
5.4 Anti-Texting Messages .................................................................................................... 40
5.5 Summary of Results ......................................................................................................... 42
Chapter 6: Conclusions and Recommendations ......................................................................... 44
6.1 Summary ......................................................................................................................... 44
6.2 Conclusions ..................................................................................................................... 44
6.3 Recommendations and Future Research ........................................................................... 45
References ................................................................................................................................ 47
Appendix A: Survey Questionnaire ........................................................................................... 49
ix
List of Tables
Table 3.1: Profile of Survey Respondents .................................................................................9
Table 3.2: Participant Database .............................................................................................. 12
Table 3.3: Messages Shown in the Driving Simulator ............................................................. 13
Table 4.1: Driver Responses for Displayed DMS Messages (Driving Simulator Survey) ........ 18
Table 4.2: Driver Reactions to Displayed Messages ............................................................... 19
Table 4.3: Message Codes on DMS ........................................................................................ 20
Table 4.4: Driver Perceptions of DMS Messages M1–M14 (Simulator Survey)...................... 20
Table 4.5: Message Codes Not Shown on DMS ..................................................................... 21
Table 4.6: Driver Perceptions of DMS Messages M15–M27 (Simulator Survey).................... 22
Table 4.7: Driver Responses to Displayed DMS Messages (Online Survey) ........................... 25
Table 4.8: Driver Reactions to Displayed Messages ............................................................... 25
Table 4.9: Driver Perceptions of DMS Messages M1–M14 (Online Survey) .......................... 26
Table 4.10: Driver Perceptions of DMS Messages M15–M27 (Online Survey) ........................ 28
Table 4.11: Driver Perceptions (Combined) of Messages Displayed on DMS in Simulator....... 31
Table 5.1: Descriptive Statistics for Avg Speed (Slow Down) ................................................ 33
Table 5.2: Significance in 2-Tailed T-Test for Avg Speed (Slow Down) ................................ 33
Table 5.3: T-Test Results for Avg Speed “Slow Down” Message by Gender Group ............... 34
Table 5.4: T-Test Results for Avg Speed “Slow Down” Message by Age Group .................... 34
Table 5.5: Descriptive Statistics for Avg Speed (Speeding Kills) ............................................ 35
Table 5.6: Significance in 2-Tailed T-Test for Avg Speed (Speeding Kills) ............................ 35
Table 5.7: T-Test Results for Avg Speed “Speeding Kills” Message by Gender Group .......... 36
Table 5.8: T-Test Results for Avg Speed “Speeding Kills” Message by Age Group ............... 36
Table 5.9: Descriptive Statistics for Avg Gap (Give Space, Don’t Tailgate) ........................... 37
Table 5.10: Significance in 2-Tailed T-Test for Avg Gap (Give Space, Don’t Tailgate)............ 37
Table 5.11: Descriptive Statistics for Maximum Speed (Give Space, Don’t Tailgate) ............... 38
Table 5.12: Significance in 2-Tailed T-Test for Maximum Speed (Give Space, Don’t
Tailgate) ................................................................................................................ 39
Table 5.13: Descriptive Statistics for Move-Over Law ............................................................. 40
Table 5.14: Significance in 2-Tailed T-Test for Move-Over Law ............................................. 40
x
Table 5.15: Anti-Texting DMS Messages................................................................................. 41
Table 5.16: Descriptive Statistics for Anti-Texting Messages ................................................... 41
Table 5.17: Significance in 2-Tailed T-Tests for Anti-Texting Messages .................................. 42
Table 5.18: Significance in 2-Tailed T-Test for DMS Messages ............................................... 43
xi
List of Figures
Figure 3.1: Study Tasks ............................................................................................................8
Figure 3.2: Layout of KU Driving Simulator .......................................................................... 10
Figure 3.3: KU Driving Simulator in Action ........................................................................... 11
Figure 3.4: Final Scenario in NADS-ISAT ............................................................................. 14
Figure 3.5: Final Scenario with DMS in NADS-MiniSim ....................................................... 15
Figure 4.1: Exposure to DMS Messages (Driving Simulator Survey)...................................... 17
Figure 4.2: Driver Perceptions of DMS Messages M1–M14 (Simulator Survey) .................... 21
Figure 4.3: Driver Perceptions of DMS Messages M15–M27 (Simulator Survey) .................. 23
Figure 4.4: Exposure to DMS Messages (Online Survey) ....................................................... 24
Figure 4.5: Driver Perceptions of DMS Messages M1–M14 (Online Survey) ......................... 27
Figure 4.6: Driver Perceptions of DMS Messages M15–M27 (Online Survey) ....................... 28
Figure 4.7: Driver Perceptions of DMS Messages M1–M14 (Combined Results) ................... 29
Figure 4.8: Driver Perceptions of DMS Messages M15–M27 (Combined Results) ................. 30
Figure 5.1: Average Speeds and Standard Deviations for the “Slow Down” Message ............. 33
Figure 5.2: Average Speeds and Standard Deviations for the “Speeding Kills” Message ........ 35
Figure 5.3: Average Gap for the “Give Space, Don’t Tailgate” Message ................................ 37
Figure 5.4: Maximum Speeds and Standard Deviations for the “Give Space, Don’t
Tailgate” Message ................................................................................................ 38
Figure 5.5: Move-Over Events Observed for the “Move Over for Law Enforcement”
Message ............................................................................................................... 39
1
Chapter 1: Introduction
1.1 Background
Many transportation agencies throughout the United States use dynamic message signs
(DMSs) to display traffic-related information such as travel times, lane closures, traffic updates,
roadwork warnings, traffic crashes, and inclement weather information to motorists. Several state
Departments of Transportation (DOTs) have recently implemented behavioral traffic safety
messages to attract motorists’ attention, raise awareness, and change driver behavior. These often-
entertaining messages focus on seat belt use, distracted driving, and aggressive driving, as well as
reinforce driving rules. For example, Massachusetts exploited the regional dialect to display “Use
yah blinkah” and “Make yah ma proud, wear yah seatbelt.” Utah displayed “That seat belt looks
good on you,” and one of Tennessee’s popular messages is “Texting and driving, oh cell no.” Iowa
and Missouri DOTs are displaying messages such as “Exit to text it,” or “Get your head out of
your apps.” To raise safety awareness, some DOTs hold contests in which the public is asked to
contribute entertaining messages. Although these messages have gained public approval, no study
has evaluated how effective these messages are in raising public awareness, changing behavior,
and promoting safety.
1.2 Objectives
The objectives of this project were to investigate whether entertaining non-traffic-related
messages influence driver behavior and to specifically identify which messages are most effective.
2
Chapter 2: Review of Current Practice
A thorough literature review was conducted to identify existing research related to DMS
messaging. Several publications, theses, and books were obtained using resources from the
University of Kansas Library and online library databases such as Google Scholar, Transportation
Research International Documentation (TRID), ScienceDirect, DBPIA, JSTOR, and IEEE Xplore
Digital Library.
2.1 Effect of DMS Messages on Driver Behavior
The number of state transportation agencies posting safety messages on DMS has increased
over the last few years. Several studies have proven that these safety messages potentially change
driver behavior, including small samples of traffic data analysis that show speed changes when
drivers approach an active DMS. Although the overall findings from these reports support the use
of DMS to disseminate highway safety messages, more research is needed to validate perceptions
noted in the surveys, and more field studies are necessary to confirm long-term impacts of DMS
use to convey safety messages about driver behavior and traffic safety.
On February 9, 2006, the Federal Highway Administration (FHWA) issued a policy
memorandum that allows driver-safety-focused messages to be displayed on a DMS. The
memorandum recommended that messages should be kept current and related to a specific
campaign, and the period that a specific message is displayed for a safety campaign should be
limited to a few weeks. More recently, DMSs have been used in public campaigns to raise
awareness of safe driving behavior and promote roadway safety. Messages are typically focused
on five common, dangerous behaviors: drowsiness, distractions, aggression, alcohol or drug
impairment, and unrestrained driving. More recently, the displayed messages also included the
state-specific number of traffic fatalities year-to-date.
A recent study by Mitran, Cummins, and Smithers (2018) reviewed the literature and
documented the existing practice of placing safety campaign messages on DMSs to determine if
they effectively influence driver behavior and provide safety benefits to the public. The authors
reviewed reports from states that currently utilize safety message campaigns and display these
messages on DMSs. The findings were based on surveys that were administered to the general
3
public and solicited their input on the effectiveness of specific messages. Although the report is
not detailed and specific data on the sample sizes or detailed survey questionnaires are missing,
the authors claimed that, overall, the use of DMSs for safety campaigns effectively changed driver
behavior. In addition, the results suggested that drivers most often read and process DMS messages
with informative, text-only content with assertive, cautionary language. However, once installed,
the researchers warned, DMSs should be treated as one of many communication channels, meaning
DMSs are likely to be underutilized if they are used only for safety campaigns.
Simulation studies have also been used to evaluate the effect of DMS messages in a
controlled environment. Vaughn, Abdel-Aty, Kitamura, and Jovanis (1992) performed a study
using a PC-based simulation program to investigate how route choice decisions are affected by
Advanced Traveler Information Systems displayed on DMSs. Results showed that males are more
likely to follow advice provided by the system, and drivers are more willing to obey the system
for a route change if the route includes a freeway. Similarly, a study by Adler and Kalsher (1994)
used a simulator program called FASTCARS to investigate the effects of traffic advisory and route
guidance information on en-route behavior and travel performance. Information on simulated
traffic speeds and route guidance was provided, and driver travel speeds were collected. Their
findings showed that providing subjects with guidance information resulted in decreased travel
times because drivers did not have to utilize trial-and-error practices.
Benson (1996) evaluated motorist attitudes regarding the content of DMS messages,
revealing that respondents preferred DMS messages that are simple, reliable, and useful. Messages
with exact locations of crashes and time-tagging traffic information received high levels of
response. Using theoretical calculations and motorists’ experiences, the results showed that a DMS
should not use more than two message screens. Other researchers have discovered that a single
message screen is preferable and that incorrect information can have negative consequences on
DMS effectiveness (Miller, Smith, Newman, & Demetsky, 1995).
DMSs have been incorporated into many metropolitan cities worldwide in the hope that
the information provided by these signs will alter driver behavior in a positive manner (Emmerink,
Nijkamp, Rietveld, & Van Ommeren, 1996). In 2001, results of a European study on the
comprehension of pictograms for DMSs demonstrated the difficulty of finding images that could
4
be readily understood (Luoma & Rämä, 2001). Another study investigated the effectiveness of
safety campaign messages, such as “Watch Your Speed,” that were randomly displayed on DMSs
throughout the United Kingdom’s motorway network (Jamson & Merat, 2007). The study focused
on the effects of individual messages and how their presence influences driver behavior towards
more critical tactical incident messages (TIMs) that warn of imminent hazards. The study used the
University of Leeds Driving Simulator, which recorded eye gazes via a Seeing Machines faceLAB
v4 eye tracker within the simulator to determine if drivers read the message. Research results
suggested that, although DMSs with safety campaign messages did not significantly affect driver
behavior, they still produced safety benefits. When used sporadically, they improved driver
alertness and acted as favorable reminders of safe driving practices. Evidence in this study also
suggested that responses to TIMs are timelier if drivers are accustomed to reading such messages
on DMSs; if not, drivers tend to ignore them.
Tay and de Barros (2008) studied driver perceptions of DMS safety messages. Focus group
discussions with transportation engineers and road safety experts were conducted, and qualitative
analysis was followed by a questionnaire survey of two samples of drivers to examine opinions of
DMS displays and self-reported reactions to several safety messages related to speeding. In
addition to standard demographic and driving information, the survey gathered data on the
respondents’ exposure to various types of messages displayed on a DMS, and the respondents were
asked to identify all the types of messages they recalled seeing on the DMS.
The first sample, which totaled 94 participants, primarily consisted of students in
transportation engineering courses at the University of Calgary, with friends and colleagues of the
research team comprising a small proportion of participants. The second sample consisted of 163
drivers who stopped at the Gasoline Alley, a popular stopover point on Highway 2 between Calgary
and Edmonton, cities in Alberta, Canada. Reports were prepared based on driver attention and
reactions to messages displayed on DMSs along the highway. Most drivers (85.8%) responded that
they looked at the displayed messages, and 69.9% reported that they thought about the displayed
messages. These encouraging results show that drivers are aware of the messages and contemplate
them, indicating that DMS is an effective communication device. Coupled with earlier findings
that most drivers support the display of other non-traffic-related information, the conclusion was
5
made that displaying non-traffic-related information does not negatively impact the effectiveness
of displayed traffic-related information.
Most participants added that the current messages are very “soft” and thus not likely to
grab the attention of drivers. They suggested that “hard-hitting” messages are harder to ignore.
Several participants also suggested that messages should be more current and specific, such as “xx
people were killed this year” or “xx% of the drivers today are speeding.” A few participants also
suggested relevant messages such as “your speed is xxx km/h - slow down” or “you are following
too closely.” Most participants felt that direct, immediate warnings more effectively grab drivers’
attention than general “soft-soft” messages. The study also found that most drivers looked at the
displayed messages and could recall many of the previous messages.
Tay and de Barros (2010) also examined the effectiveness of anti-speeding messages on
driver attitudes and traffic speed on an inter-city highway. “Speeding will catch up to you” and
“Don’t save time, save lives” messages were used to measure driver behavior. A questionnaire
survey, developed, and administrated to 97 drivers, gathered information on driver exposure to and
recollection of the various types of information displayed on DMSs; driver attitudes towards the
messages were recorded using a standard 5-point Likert scale. The authors also performed an on-
road test, based on a simple quasi-experimental design methodology, that provided valid
interference on the effect of a particular message by measuring and comparing traffic speeds when
drivers were exposed to the message and when they were not exposed to the message. This study
showed that the messages had a relatively small, albeit beneficial effect on driver behavior and on-
road traffic speed.
2.2 Mechanics of Driving Simulators
Driving simulators virtually represent the dynamics of a vehicle and surrounding
environment without physically jeopardizing test subjects (Capustiac & Napoca, 2011). The goal
of the driving simulator is to immerse drivers into a virtual environment generated by computer
rendering. While driving in a particular scenario, the virtually generated environment moves with
respect to the vehicle, creating a perception of motion. Several vehicle manufacturers and
educational institutions use driving simulators to research driver behavior, body position, human-
6
vehicle interactions, roadway geometrics, and driver assistance systems. Because they pose no
physical threat to individuals, simulators can efficiently determine driving risks.
Driving simulators are generally categorized in terms of cost and number of degrees of
freedom (DOFs), or the direction in which motion is free to occur. For example, a simulator with
three DOFs can demonstrate motion in three planes: x-axis, y-axis, and z-axis. As the number of
DOFs increases, the driving experience becomes more realistic, but the cost of the driving
simulator also increases. Simulators are typically classified as low level, mid-level, or high-level;
low-level simulators are usually fixed-based (FB) simulators (Slob, 2008).
Driving simulators have existed since the early 1950s when vehicle manufacturers started
designing simulators to test designs. In the early 1970s, Volkswagen built their first driving
simulator with a 3-DOF (yaw, roll, and pitch) motion system (Slob, 2008). Mazda was the next
vehicle manufacturer to develop a 4-DOF (yaw, roll, pitch, and surge) system in 1985. Around the
same period, Daimler-Benz introduced a 6-DOF system with a 180-degree view in a hydraulic
hexapod (Slob, 2008). Ford Motor Company introduced their 6-DOF simulator, Virttex, in 1994.
In addition to yaw, roll, and pitch, Ford’s simulator could also sway, heave, and surge. Renault
implemented a similar system in 2004 (Slob, 2008). Kookmin University in South Korea
developed a 6-DOF system in a single-seat simulator, and in 2001, the system was replaced with
a full-car chassis and a 2-DOF motion platform. The Kookmin University Simulator can also
generate effects such as rumble strips and speed bumps (Lee, Sung, Lee, Kim, & Cho, 2007).
Highly sophisticated simulators (high-level simulators), such as the Toyota Driving
Simulator at the Higashi-Fuji Technical Center in Susono, Japan, and the National Advanced
Driving Simulator (NADS) at the University of Iowa in the United States, provide realistic,
immersive driving experiences. Both Toyota and NADS simulators have 13 DOFs with a fully
enclosed hexapod and a 360
o
horizontal view (Slob, 2008).
Compared to high-level simulators, low-level simulators are not fully capable of delivering
realistic immersion into a virtual driving environment. In addition, low-level simulators are more
prone to effects such as simulator sickness, which occurs because the simulator lacks motion cues.
Humans perceive motion through skin pressure and balance organs in the ear (Capustiac &
Napoca, 2011). When the human body is subject to a simulator, however, the eyes register visual
7
cues, but the ears and skin do not register any movement (motion cues), leading to a lack of motion
perception. The most common symptoms of simulator sickness are nausea, headaches, vomiting,
and sweating. Therefore, Kemeny and Panerai (2003) recommended a minimum horizontal field
of view (FOV) of 120° for drivers to accurately perceive speed with respect to moving images in
a driving simulator.

8
Chapter 3: Methodology
This research used surveys and driving simulator experiments to evaluate the effectiveness
of non-traffic-related messages for changing driver behavior and promoting safety. Participants
recruited for the driving simulator at the University of Kansas (KU) were given a screening
questionnaire that gathered information regarding their demographics and driving behavior.
Simulator scenarios were created, including selecting and setting up DMS messages, and,
following completion of the draft scenario, pilot testing was carried out to detect any discrepancies
missed by the designer. Figure 3.1 highlights the main tasks performed in this study.
Figure 3.1: Study Tasks
Two additional surveys were developed to gauge drivers’ preferences regarding the DMS
and perceived effectiveness of specific messages. The first survey was given online, and the second
survey was administered after the driving simulator study was completed. Data were analyzed

9
using the statistical package for social sciences (SPSS) software (IBM, 2011), and data analysis
included paired t-tests and analysis of variance (ANOVA).
3.1 Online and Simulator Surveys
This study utilized two surveys to examine driver perceptions of DMS use and self-reported
reactions to the displayed messages. One survey was given to 120 participants online via social
media. The other survey was administered to 60 drivers after they finished simulated driving. Both
surveys included the same questions (Appendix A).
Table 3.1 shows the profile of respondents from the online and driving simulator surveys.
As shown in the table, 65 (54.2%) of the 120 respondents in the online survey were male and 55
(45.8%) were female. In addition, results showed that drivers aged 18–49 years were
overrepresented, and the sample consisted of a higher proportion of drivers with more than 10
years of driving experience. Of the 60 respondents in the driving simulator survey, 31 (51.70%)
were male and 29 (48.3%) were female. Again, drivers aged 18–50 years were overrepresented in
the total sample, which also consisted of a higher proportion of drivers with more than 10 years of
driving experience.
Table 3.1: Profile of Survey Respondents
Online Survey Driving Simulator Survey
Gender
Male
54.2% 51.7%
Female
45.8%
48.3%
Age (yrs)
18–25
43.3
41.7
26–49
39.2 41.7
50+ 19.2 16.7
Driving Experience (yrs)
1–5
33.3 36.7
6–10
16.7
16.7
>10
50.0 46.7

10
3.2 Driving Simulator Experiment
The KU driving simulator is a fixed-based simulator in an Acura MDX chassis (half cab).
As shown in Figure 3.2 and Figure 3.3, the simulator provides a 170° horizontal FOV, with three
forward screens and one rear screen. The rear screen renders the view of both sideview mirrors
and the rearview mirror, providing an immersive driving experience. The simulation run and
respective data were recorded on the MiniSim (NADS, 2015) computer, while the video of each
participant’s drive was captured on a video-capture computer. Eye-tracking equipment was used
to collect eye-tracking data from the participants, and the eye-tracking and simulation data were
synchronized.
Figure 3.2: Layout of KU Driving Simulator

11
Figure 3.3: KU Driving Simulator in Action
3.2.1 Participation Recruitment
Outlets such as advertisements at KU, the Lawrence Public Library, the Department of
Motor Vehicles (DMV), churches, and social media platforms (Facebook and LinkedIn) were used
to distribute the survey to the general public in Kansas. In addition, requests for participation were
sent to people who had previously participated in human factors-related research. A web-based
prescreening questionnaire collected demographics and information pertaining to current driving
habits from perspective participants. The driving simulator study and related material were
approved by the University of Kansas Human Research Protection Program (HRPP). A total of
201 participants showed interest in participating in the driving simulator study, and 60 participants
were invited to participate. The selected participants’ database is shown in Table 3.2.
3.2.2 Designing Roadway Geometry
This study utilized the tile mosaic tool (TMT) to generate roadway alignments and render
the virtual environment (NADS, 2016). The program used square tiles with dimensions of 660 ft
by 660 ft, consisting of virtual environment features such as pavement, shoulder, vegetation,
markings, and geometry. The square tiles could be combined to form a continuous roadway layout;
a four-lane divided highway with a grass median, 70 mph speed limit, and several DMSs were
created for this study. The virtual driving scenario consisted of a typical freeway with straight and
curved segments. The total length of the freeway, including two interchanges, was approximately
60 miles.

12
Table 3.2: Participant Database
No.
ID
Age
Gender
No.
ID
Age
Gender
1
V001
28
M
31
V039
32
M
2
V002
19
F
32
V040
21
M
3
V003
29
M
33
V042
20
F
4
V004
18
M
34
V043
54
M
5
V005
26
F
35
V044
42
F
6
V007
22
M
36
V045
18
M
7
V008
19
F
37
V046
21
M
8
V011
28
M
38
V047
62
M
9
V012
24
F
39
V048
56
F
10
V016
20
M
40
V049
46
M
11
V017
28
M
41
V051
37
F
12
V018
42
F
42
V052
77
M
13
V019
21
M
43
V053
21
F
14
V020
38
F
44
V054
31
F
15
V021
46
M
45
V055
20
F
16
V022
26
F
46
V056
21
M
17
V023
23
M
47
V057
64
F
18
V024
21
M
48
V058
21
M
19
V025
34
F
49
V059
24
F
20
V027
39
F
50
V060
25
M
21
V028
24
F
51
V061
18
F
22
V029
21
F
52
V062
26
M
23
V030
50
F
53
V063
55
F
24
V031
18
M
54
V064
21
F
25
V033
37
M
55
V065
34
F
26
V034
60
M
56
V066
34
F
27
V035
28
M
57
V067
18
M
28
V036
28
M
58
V068
31
F
29
V037
30
M
59
V069
50
F
30
V038
50
F
60
V070
29
M
3.2.3 Experiment Procedure
The research team used NADS-ISAT and NADS-MiniSim software programs to create
simulated scenarios of roadways with DMSs that displayed specific non-traffic-related content.
KDOT determined the exact content of the displayed messages in order to test messages that were
thought to specifically influence driver behavior. Each DMS was spaced approximately 3 miles
apart, and drivers drove past approximately 20 DMSs throughout the simulation. The entire
duration of the experiment was approximately 60 min.

13
In the first part of the roadway network, drivers underwent a 5-minute practice session that
resembled experimental motorway conditions. No DMS was present during the practice drive so
participants could acclimate to the driving simulator and the driving process. Screening for
simulation sickness was also carried out, and participants with severe symptoms were excluded
from the study. In the second part of the network, DMSs were introduced into the simulated
network, and driver data such as speed control, lane changing, and gap acceptance were collected
to investigate the impact of message content on driving behavior. The four general DMS message
categories were texting and driving, move-over law, car-following event, and anti-speeding
messages. A total of 14 messages were selected, and most were repeated at least twice to determine
if message repetition changed driver behavior. Since some of the selected messages were related
to texting while driving, participants were provided with the Messenger app that was installed on
a cellphone and placed inside the car. Messages were sent to them from a laptop, and participants
were advised to attempt to reply to the text messages if they felt comfortable while driving the
simulator. The displayed messages are shown in Table 3.3.
Table 3.3: Messages Shown in the Driving Simulator
Type of
Message
Message
Texting
Steering Wheel: Not A Hands-Free Device
Pay Attention and Just Drive
Drive Like Your Life Depends on It
Get Your Head out of Your Apps
One Text or Call Could Wreck It All
Even Texting Drivers Hate Texting Drivers
No Text Is Worth A Life
What’s More Important, Your Text or Your Life?
Don’t Let Texting Blind You
Texting & Driving—It Can Wait
Tailgating
Give Space, Don’t Tailgate
Move-Over Law
Move Over for Law Enforcement and Maintenance Workers
Speeding
Speeding Kills
Slow Down
In each driving scenario, participants had to drive from the starting point to the end point.
The distance from the starting point to the first DMS location was approximately 1,500 m, which
allowed drivers to accelerate to typical driving speeds. In addition, to make the driving scenarios

14
more realistic, several vehicles were modeled as ambient traffic. Because the research team
hypothesized that drivers would change their behavior once they read the message signs,
statistically significant differences in driver speed, acceleration, and gaps were investigated before
and after drivers looked at (and read) the message signs. Upon completion, participants were asked
to answer questions regarding the usefulness and perceived effectiveness of the DMS content.
Figure 3.4 and Figure 3.5 show final scenarios from the NADS-ISAT and NADS-MiniSim
software programs, respectively.
Figure 3.4: Final Scenario in NADS-ISAT

15
Figure 3.5: Final Scenario with DMS in NADS-MiniSim
3.2.4 Pilot Testing
Following the initial scenario design, three test participants with no prior exposure to the
simulator were invited to drive the scenarios. Based on their feedback, modifications were made
to the events within the scenario, such as changing traffic speed, adjusting distances between
vehicles, and fixing unnoticed graphics bugs in the simulated environment.
3.2.5 Data Collection, Reduction, and Statistical Analysis
The scenarios were run using the NADS MiniSim software, which directly linked to
hardware inputs such as steering wheel, accelerator pedal, brake pedal, and gear selector (NADS,
2015). All data collection outputs were stored in a data acquisition file, accessible through
MATLAB (The MathWorks, Inc., 1996). A MATLAB plugin, the data acquisition viewer, provided
by NADS, was used to select required data variables from each scenario. Filtered and sorted data
included variables such as vehicle speed, lateral position, distance to lead vehicle, deceleration
rate, and video data. After extracting the required variables, data were exported to Microsoft Excel
for further sorting into individual events. Each event was uniquely numbered in ISAT between 1
and 20, allowing easy identification during sorting. The data variables were then organized by
participant ID and age group.
16
The surveys and driving simulator data were used to assess whether drivers believed that
the message content had affected their behavior and whether the message content had affected their
driving behavior and improved safety awareness. Statistical tests were used for assessment. For
statistical analysis, the null hypothesis was that there was no significant difference between driver
behavior and awareness of individuals driving before and after seeing the DMS message, as
verified by a 2-tailed paired sample t-test at a confidence level of 95%. ANOVA was also
conducted to identify significant differences in data variables between age groups or genders.

17
Chapter 4: Survey Data Analysis
4.1 Driving Simulator Survey Data Analysis
4.1.1 Awareness of DMS Messages
Upon completion of the driving simulator experiments, participants were asked to complete
a survey pertaining to the perceived effectiveness of DMS messages. In addition to standard
demographics and driving information, the survey gathered data on the respondents’ exposure to
various types of DMS messages. Participants were asked to indicate all the types of messages they
recalled seeing on a DMS. As shown in Figure 4.1, most respondents remembered seeing safety-
related messages; in fact, the positive response rate was 89%, followed by construction-related
information (42%), crash information (40%), travel-time information (36%), and weather-related
messages (21%). These results may reflect the relative amount of exposure or number of times
these messages were displayed. Overall, most drivers recalled seeing the DMS messages, which
indicates that DMS is an effective communication device.
Figure 4.1: Exposure to DMS Messages (Driving Simulator Survey)

18
4.1.2 Uses of DMS
A standard 5-point Likert scale was used to elicit drivers’ opinions on the various displayed
messages. As shown in Table 4.1, most respondents appreciated the display of information
regarding weather, real-time traffic, reminders not to tailgate, general safety messages, and
reminders of driver courteousness. Their opinions on anti-speeding messages, however, were
somewhat neutral.
Table 4.1: Driver Responses for Displayed DMS Messages (Driving Simulator Survey)
Driver Responses to DMS
SD
(%)
D
(%)
N
(%)
A
(%)
SA
(%)
Mean
(1–5)
It is a good idea to remind drivers….
not to follow too closely on the road. 0.00 1.67 28.33 50.00 20.00 3.88
to be courteous on the road. 1.67 8.33 26.67 50.00 13.33 3.65
of hazardous weather conditions. 0.00 0.00 3.33 30.00 66.67 4.63
It is a good idea to display….
general safety messages on highway
message boards.
1.67 6.67 25.00 41.67 25.00 3.82
anti-speeding messages on highway
message boards.
1.67 10.00 36.67 35.00 16.67 3.55
drunk-driving messages on highway
message boards.
5.00 5.00 18.33 50.00 21.67 3.78
anti-texting-and-driving messages on
highway message boards.
1.67 5.00 15.00 41.67 36.67 4.07
seat belt-use messages on highway
message boards.
0.00 6.67 20.00 43.33 30.00 3.97
weather-warning messages. 1.67 3.33 5.00 40.00 50.00 4.33
Note: Mean calculated using strongly disagree (SD) = 1, disagree (D) = 2, neutral (N) = 3, agree (A) = 4, and
strongly agree (SA) = 5
4.1.3 Display of Road Safety Messages
In order to evaluate the effectiveness of the DMS for changing driver behavior, drivers
initially were asked about the attention they paid to the messages. Second, in order to gauge
behavioral change, examples of more specific types of messages were presented to survey
respondents to determine changes in driving behavior. Table 4.2 reports the results of drivers’
attention and reactions to the messages. Most drivers (88.3%) reported that they looked at the
displayed messages, and 85% reported that they thought about the displayed messages. Moreover,
since a majority of the respondents agreed that road safety messages should be displayed but were

19
not overly enthusiastic about anti-speeding messages, displaying other safety messages may be
more effective than displaying anti-speeding messages.
Table 4.2: Driver Reactions to Displayed Messages
Respond to the Following Statements:
SD
(%)
D
(%)
N
(%)
A
(%)
SA
(%)
Mean
(1–5)
I look at the information on highway message
boards when it is displayed.
0.00 3.33 8.33 51.67 36.67 4.22
I think about the information displayed on highway
message boards.
0.00 0.00 15.00 50.00 35.00 4.20
Behavioral Effects of Road Safety Messages
Remind me to check my following distance 3.33 13.33 33.33 40.00 10.00 3.40
Reduce my likelihood of speeding 3.33 13.33 31.67 36.67 15.00 3.47
Remind me not to text while driving 3.33 6.67 20.00 50.00 20.00 3.77
Remind me not to drive after consuming alcohol 10.00 3.33 18.33 40.00 28.33 3.73
Remind me to pay more attention while driving 3.33 3.33 16.67 55.00 21.67 3.88
Remind me to always use the seat belt while
driving
3.33 8.33 13.33 50.00 25.00 3.85
Remind me to move over for law enforcement or
maintenance workers
3.33 3.33 11.67 46.67 35.00 4.07
Note: Mean calculated using strongly disagree (SD) = 1, disagree (D) = 2, neutral (N) = 3, agree (A) = 4, and
strongly agree (SA) = 5
4.1.4 Driver Perception of DMS Messages
4.1.4.1 Messages Shown in Simulator (M1-M14)
Upon completion of the experiment, participants were surveyed regarding their thoughts
about the 14 messages shown on the DMS during the simulator experiment. The message codes
are shown in Table 4.3.
To confirm these survey responses, drivers’ opinions were elicited using a standard 5-point
Likert scale. As shown in Table 4.4 and Figure 4.2, most participants (90%) thought that the
message “Move Over for Law Enforcement and Maintenance Workers” was most effective,
followed by “Give Space, Don’t Tailgate” (81.67%) and “No Text Is Worth A Life” (80%).

20
Table 4.3: Message Codes on DMS
Code Messages
M1 Steering Wheel: Not A Hands-Free Device
M2 Pay Attention and Just Drive
M3 Give Space, Don’t Tailgate
M4 Move Over for Law Enforcement and Maintenance Workers
M5 Speeding Kills
M6 Slow Down
M7 Drive Like Your Life Depends on It
M8 Get Your Head out of Your Apps
M9 One Text or Call Could Wreck It All
M10 Even Texting Drivers Hate Texting Drivers
M11 No Text Is Worth A Life
M12 What’s More Important, Your Text or Your Life?
M13 Don’t Let Texting Blind You
M14 Texting & Driving—It Can Wait
Table 4.4: Driver Perceptions of DMS Messages M1–M14 (Simulator Survey)
Messages
NAE
(%)
NSE
(%)
N (%)
SE
(%)
VE
(%)
Mean
(1–5)
Steering Wheel: Not a Hands-Free Device 1.67 13.33 28.33 23.33 33.33 3.73
Pay Attention and Just Drive 5 8.33 30 33.33 23.33 3.62
Give Space, Don’t Tailgate 1.67 5 11.67 46.67 35 4.08
Move Over for Law Enforcement and
Maintenance Workers
1.67 1.67 6.67 31.67 58.33 4.43
Speeding Kills 0 13.33 21.67 35 30 3.82
Slow Down 3.33 3.33 23.33 35 35 3.95
Drive Like Your Life Depends on It 0 16.67 33.33 23.33 26.67 3.60
Get Your Head out of Your Apps 8.33 11.67 23.33 21.67 35 3.63
One Text or Call Could Wreck It All 0 13.33 26.67 31.67 28.33 3.75
Even Texting Drivers Hate Texting Drivers 8.33 16.67 25 20 30 3.47
No Text Is Worth A Life 1.67 3.33 15 48.33 31.67 4.05
What’s More Important, Your Text or Your
Life?
5 13.33 21.67 35 25 3.62
Don’t Let Texting Blind You 6.67 16.67 38.33 20 18.33 3.27
Texting & Driving—It Can Wait 0 18.33 33.33 30 18.33 3.48
Note: Mean calculated using not-at-all effective (NAE) = 1, not-so effective (NSE) = 2, neutral (N) = 3,
somewhat effective (SE) = 4, and very effective (VE) = 5

21
Note: VE: very effective, SE: somewhat effective, N: neutral, NSE: not so effective, NAE: not at all effective
Figure 4.2: Driver Perceptions of DMS Messages M1–M14 (Simulator Survey)
4.1.4.2 Other Messages
Participants were also asked about the effectiveness of 13 messages that were not shown
in the simulator study. The message codes (M15–M27) are shown in Table 4.5.
Table 4.5: Message Codes Not Shown on DMS
Code
Messages
M15 Click It or Ticket
M16 Click It, Don’t Risk It
M17 Buckle Up, Every Trip, Every Time
M18 Head Up Phone Down
M19
A Steering Wheel Is Not A Hands-Free Device
M20
Slow Down, Ride Like Your Life Depends on It
M21 Speeding Kills—Arrive Alive
M22 Tomorrow Is the Reward for Safe Driving
M23 Don’t Text and Drive, It Can Wait
M24 Just Drive
M25 You Drink. You Drive. You Lose.
M26 Drunk Driving—Don’t Let Cheers Turn into Tears
M27 Drive High Get a DUI

22
As with the first messages, drivers’ opinions about the messages were elicited using a
standard 5-point Likert scale. As shown in Table 4.6 and Figure 4.3, most participants (80%)
thought that the message “Speeding Kills—Arrive Alive” was most effective, followed by “Click
it or Ticket” (78.33%) and “You Drink. You Drive. You Lose.” (71.67%).
Table 4.6: Driver Perceptions of DMS Messages M15–M27 (Simulator Survey)
Messages
NAE
(%)
NSE
(%)
N
(%)
SE
(%)
VE
(%)
Mean
(1–5)
Click It or Ticket 3.33 5 13.33 36.67 41.67 4.08
Click It, Don’t Risk It 6.67 11.67 28.33 41.67 11.67 3.40
Buckle Up, Every Trip, Every Time 6.67 13.33 25 28.33 26.67 3.55
Head Up Phone Down 0 6.67 25 43.33 25 3.87
A Steering Wheel Is Not A Hands-Free
Device
1.67 16.67 26.67 33.33 21.67 3.57
Slow Down, Ride Like Your Life Depends
on It
6.67 8.33 25 38.33 21.67 3.60
Speeding Kills—Arrive Alive 1.67 3.33 15 48.33 31.67 4.05
Tomorrow Is the Reward for Safe Driving 6.67 15 18.33 40 20 3.52
Don’t Text and Drive, It Can Wait 3.33 18.33 21.67 38.33 18.33 3.50
Just Drive 16.67 11.67 30 25 16.67 3.13
You Drink. You Drive. You Lose. 1.67 6.67 20 41.67 30 3.92
Drunk Driving—Don’t Let Cheers Turn
into Tears
5 8.33 23.33 36.67 26.67 3.72
Drive High Get A DUI 6.67 5 25 40 23.33 3.68
Note: Mean calculated using not-at-all effective (NAE) = 1, not-so effective (NSE) = 2, neutral (N) = 3,
somewhat effective (SE) = 4, and very effective (VE) = 5

23
Note: VE: very effective, SE: somewhat effective, N: neutral, NSE: not-so effective, NAE: not-at-all effective
Figure 4.3: Driver Perceptions of DMS Messages M15–M27 (Simulator Survey)
4.2 Online Survey Data Analysis
4.2.1 Awareness of DMS Messages
The online survey gathered data on the respondents’ exposure to various messages
displayed on DMSs. As shown in Figure 4.4, most respondents (85%) reported that they had seen
safety-related messages displayed on DMSs. Subsequently, 45% of respondents reported seeing
crash-related information, 40% reported seeing construction messages, 33% had seen travel-time
information, and only 25% remembered seeing weather-related messages. Since traffic incidents
and adverse weather reports are relatively infrequent, it is not surprising that more drivers recalled
seeing safety messages. Therefore, in terms of awareness and recall, most drivers recalled seeing
DMS messages.

24
Figure 4.4: Exposure to DMS Messages (Online Survey)
4.2.2 Uses of DMS
As shown in Table 4.7, most survey respondents recognized the benefits of displaying
information regarding weather, real-time traffic, reminders not to tailgate, general safety messages,
and reminders of driver courteousness. Similar to the results obtained after the simulation study,
respondents’ opinions on the display of anti-speeding messages, however, were somewhat neutral.
These results show that most drivers support the use of DMS for the display of other types of
messages besides traffic information.
4.2.3 Display of Road Safety Messages
Table 4.8 reports the results of drivers’ attention and reactions to road safety messages on
DMSs. Most drivers (89%) indicated that they look at displayed messages, and 85% reported that
they think about the displayed messages. These results reveal that a DMS is an effective
communication device and that displaying non-traffic-related information does not negatively
impact the effectiveness of traffic-related information. Since most respondents appreciated the
display of road safety messages but were not overly enthusiastic about anti-speeding messages,
displaying other safety messages may be more effective than displaying anti-speeding messages.

25
Table 4.7: Driver Responses to Displayed DMS Messages (Online Survey)
Driver Responses to DMS
SD
(%)
D
(%)
N
(%)
A
(%)
SA
(%)
Mean
(1–5)
It is a good idea to remind drivers….
not to follow too closely on the road.
1.67
1.67
25.83
50.00
20.83
3.87
to be courteous on the road.
1.67
7.50
25.00
50.83
15.00
3.70
of hazardous weather conditions.
0.00
0.00
3.33
28.33
68.33
4.65
It is a good idea to display….
general safety messages on highway message
boards.
1.67 5.83 23.33 43.33 25.83 3.86
anti-speeding messages on highway message
boards.
2.50 10.00 39.17 33.33 15.00 3.48
drunk-driving messages on highway message
boards.
5.00 5.00 16.67 50.00 23.33 3.82
anti-texting and driving messages on highway
message boards.
0.83 4.17 14.17 42.50 38.33 4.13
seat belt-use messages on highway message
boards.
0.83 3.33 20.83 45.83 29.17 3.99
weather-warning messages.
1.67
4.17
5.00
40.00
49.17
4.31
Note: Mean calculated using strongly disagree (SD) = 1, disagree (D) = 2, neutral (N) = 3, agree (A) = 4, and
strongly agree (SA) = 5
Table 4.8: Driver Reactions to Displayed Messages
Respond to the Following Statements:
SD
(%)
D
(%)
N
(%)
A
(%)
SA
(%)
Mean
(1–5)
I look at the information on highway message
boards when it is displayed.
0.83 2.50 7.50 51.67 37.50 4.23
I think about the information displayed on
highway message boards.
0.83 1.67 12.50 51.67 33.33 4.15
Behavioral Effects of Road Safety Messages
Remind me to check my following distance
4.17
12.50
32.50
41.67
9.17
3.39
Reduce my likelihood of speeding
2.50
14.17
30.83
35.83
16.67
3.50
Remind me not to text while driving
2.50
5.00
19.17
52.50
20.83
3.84
Remind me not to drive after consuming alcohol
6.67
3.33
19.17
41.67
29.17
3.83
Remind me to pay more attention while driving
3.33
2.50
15.83
57.50
20.83
3.90
Remind me to always use the seat belt while
driving
4.17 6.67 11.67 53.33 24.17 3.87
Remind me to move over for law enforcement or
maintenance workers
4.17 4.17 12.50 45.83 33.33 4.00
Note: Mean calculated using strongly disagree (SD) = 1, disagree (D) = 2, neutral (N) = 3, agree (A) = 4, and
strongly agree (SA) = 5

26
4.2.4 Driver Perception of DMS Messages
4.2.4.1 Messages Shown in Simulator (M1–M14)
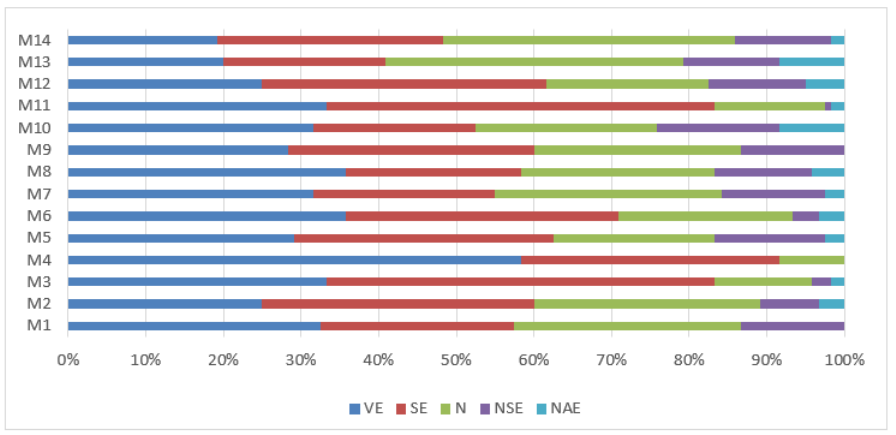
The 14 DMS messages coded M1–M14 (Table 4.3) were also used in the online survey. To
confirm survey responses, drivers’ opinions on various displayed messages were elicited using a
standard 5-point Likert scale. As shown in Table 4.9 and Figure 4.5, most participants (91.67%)
thought that “Move Over for Law Enforcement and Maintenance Workers” was the most effective
message, followed by “No Text Is Worth A Life” (83.33%) and “Give Space, Don’t Tailgate”
(83.3%).
Table 4.9: Driver Perceptions of DMS Messages M1–M14 (Online Survey)
Messages
NAE
(%)
NSE
(%)
N
(%)
SE
(%)
VE
(%)
Mean
(1–5)
Steering Wheel: Not A Hands-Free Device 0 13.33 29.17 25 32.5 3.77
Pay Attention and Just Drive 3.33 7.5 29.17 35 25 3.71
Give Space, Don’t Tailgate 1.67 2.5 12.5 50 33.33 4.11
Move Over for Law Enforcement and
Maintenance Workers
0 0 8.33 33.33 58.33 4.50
Speeding Kills 2.5 14.17 20.83 33.33 29.17 3.73
Slow Down 3.33 3.33 22.5 35 35.83 3.97
Drive Like Your Life Depends on It 2.5 13.33 29.17 23.33 31.67 3.68
Get Your Head out of Your Apps 4.17 12.5 25 22.5 35.83 3.73
One Text or Call Could Wreck It All 0 13.33 26.67 31.67 28.33 3.75
Even Texting Drivers Hate Texting Drivers
8.33 15.83 23.33 20.83 31.67 3.52
No Text Is Worth A Life 1.67 0.83 14.17 50 33.33 4.12
What’s More Important, Your Text or Your
Life?
5 12.5 20.83 36.67 25 3.64
Don’t Let Texting Blind You
8.33 12.5 38.33 20.83 20 3.32
Texting & Driving—It Can Wait
1.67 12.5 37.5 29.17 19.17 3.52
Note: Mean calculated using not-at-all effective (NAE) = 1, not-so effective (NSE) = 2, neutral (N) = 3,
somewhat effective (SE) = 4, and very effective (VE) = 5
27
Note: VE: very effective, SE: somewhat effective, N: neutral, NSE: not-so effective, NAE: not-at-all effective
Figure 4.5: Driver Perceptions of DMS Messages M1–M14 (Online Survey)
4.2.4.2 Other Messages
The online survey also included questions regarding the effectiveness of 13 messages
coded M15–M27 (Table 4.5). Drivers’ opinions on the various displayed messages were also
elicited using the standard 5-point Likert scale. As shown in Table 4.10 and Figure 4.6, most
participants (84.17%) thought that “Speeding Kills—Arrive Alive” was the most effective
message, followed by “Click It or Ticket” (78.33%) and “You Drink. You Drive. You Lose.”
(75.83%).
Most survey participants recommended displaying suggestions for safer driving behavior
and other road safety messages, including warnings about driver fatigue, drunk driving, tailgating,
and speeding. Most participants also affirmed the effectiveness of displaying non-traffic-related
information.

28
Table 4.10: Driver Perceptions of DMS Messages M15–M27 (Online Survey)
Messages
NAE
(%)
NSE
(%)
N
(%)
SE
(%)
VE
(%)
Mean
(1–5)
Click It or Ticket 5 4.17 12.5 36.67 41.67 4.06
Click It, Don’t Risk It 3.33 12.5 29.17 42.5 12.5 3.48
Buckle Up, Every Trip, Every Time 8.33 14.17 23.33 29.17 25 3.48
Head Up Phone Down 0 2.5 26.67 45.83 25 3.93
A Steering Wheel Is Not A Hands-Free
Device
3.33 15.83 25 35 20.83 3.54
Slow Down, Ride Like Your Life
Depends on It
5.83 7.5 23.33 35.83 27.5 3.72
Speeding Kills—Arrive Alive 0.83 2.5 12.5 50 34.17 4.14
Tomorrow Is the Reward for Safe Driving 7.5 14.17 17.5 41.67 19.17 3.51
Don’t Text and Drive, It Can Wait 5 18.33 20.83 39.17 16.67 3.44
Just Drive 14.17 12.5 26.67 26.67 20 3.26
You Drink. You Drive. You Lose. 0.83 2.5 20.83 42.5 33.33 4.05
Drunk Driving—Don’t Let Cheers Turn
into Tears
5 6.67 25 37.5 25.83 3.72
Drive High Get A DUI 5 5 25.83 37.5 26.67 3.76
Note: Mean calculated using not-at-all effective (NAE) = 1, not-so effective (NSE) = 2, neutral (N) = 3,
somewhat effective (SE) = 4, and very effective (VE) = 5
Note: VE: very effective, SE: somewhat effective, N: neutral, NSE: not-so effective, NAE: not-at-all effective
Figure 4.6: Driver Perceptions of DMS Messages M15–M27 (Online Survey)

29
4.3. Combined Analysis
Based on preliminary analysis, the results obtained from the two DMS display surveys
were very similar even though they were administered to different sample populations. Therefore,
the two samples were combined to report aggregated results. Figure 4.7 displays the combined
results of the two surveys for questions M1–M14. Visual assessment of Figure 4.7 and Figure 4.8
reveals that the participants responded similarly across the two surveys; therefore, the difference
between the two surveys was minimal, and the conclusion was made that the simulator drivers and
online survey participants had comparable perceptions regarding the messages.
Note: VE: very effective, SE: somewhat effective, N: neutral, NSE: not-so effective, NAE: not-at-all effective
Figure 4.7: Driver Perceptions of DMS Messages M1–M14 (Combined Results)

30
Figure 4.8: Driver Perceptions of DMS Messages M15–M27 (Combined Results)
After combining the two survey results (Table 4.11), most survey participants (91.11%)
thought that “Move Over for Law Enforcement and Maintenance Workers” was the most effective
message, followed by “Give Space, Don’t Tailgate” (82.78%), “Speeding Kills—Arrive Alive”
(82.77%), and “No Text Is Worth A Life” (82%).

31
Table 4.11: Driver Perceptions (Combined) of Messages Displayed on DMS in Simulator
Code Messages
NAE
(%)
NSE
(%)
N
(%)
SE
(%)
VE
(%)
Mean
(1–5)
M1
Steering Wheel: Not A Hands-
Free Device
0.56 13.33 28.89 24.44 32.78 3.76
M2
Pay Attention and Just Drive
3.89
7.78
29.44
34.44
24.44
3.68
M3 Give Space, Don’t Tailgate 1.67 3.33 12.22 48.89 33.89 4.10
M4
Move Over for Law Enforcement
and Maintenance Workers
0.56 0.56 7.78 32.78 58.33 4.48
M5 Speeding Kills 1.67 13.89 21.11 33.89 29.44 3.76
M6
Slow Down
3.33
3.33
22.78
35.00
35.56
3.96
M7
Drive Like Your Life Depends on It
1.67
14.44
30.56
23.33
30.00
3.66
M8 Get Your Head out of Your Apps 5.56 12.22 24.44 22.22 35.56 3.70
M9
One Text or Call Could Wreck It
All
0.00 13.33 26.67 31.67 28.33 3.75
M10
Even Texting Drivers Hate Texting
Driver
8.33 16.11 23.89 20.56 31.11 3.50
M11
No Text Is Worth A Life
1.67
1.67
14.44
49.44
32.78
4.10
M12
What’s More Important, Your Text
or Your Life?
5.00 12.78 21.11 36.11 25.00 3.63
M13
Don’t Let Texting Blind You
7.78
13.89
38.33
20.56
19.44
3.30
M14 Texting & Driving—It Can Wait 1.11 14.44 36.11 29.44 18.89 3.51
M15 Click It or Ticket 4.44 4.44 12.78 36.67 41.67 4.07
M16
Click It, Don’t Risk It
4.44
12.22
28.89
42.22
12.22
3.46
M17
Buckle Up, Every Trip, Every
Time
7.78 13.89 23.89 28.89 25.56 3.51
M18
Head Up Phone Down
0.00
3.89
26.11
45.00
25.00
3.91
M19
A Steering Wheel Is Not a Hands-
Free Device
2.78 16.11 25.56 34.44 21.11 3.55
M20
Slow Down, Ride Like Your Life
Depends on It
6.11 7.78 23.89 36.67 25.56 3.68
M21
Speeding Kills—Arrive Alive
1.11
2.78
13.33
49.44
33.33
4.11
M22
Tomorrow Is the Reward for Safe
Driving
7.22 14.44 17.78 41.11 19.44 3.51
M23
Don’t Text and Drive, It Can Wait
4.44
18.33
21.11
38.89
17.22
3.46
M24
Just Drive
15.00
12.22
27.78
26.11
18.89
3.22
M25 You Drink. You Drive. You Lose. 1.11 3.89 20.56 42.22 32.22 4.01
M26
Drunk Driving—Don’t Let Cheers
Turn into Tears
5.00 7.22 24.44 37.22 26.11 3.72
M27 Drive High Get A DUI 5.56 5.00 25.56 38.33 25.56 3.73
Note: Mean calculated using not-at-all effective (NAE) = 1, not-so effective (NSE) = 2, neutral (N) = 3,
somewhat effective (SE) = 4, and very effective (VE) = 5
32
Chapter 5: Driver Behavior Data Analysis
Data collected via the driving simulator were used to identify changes in driver behavior
due to DMS messages. The statistical analysis involved 2-tailed paired t-tests. A 95% confidence
interval was assumed for the t-tests.
5.1 Speeding Messages
Two DMS speeding messages were used in the simulator scenario to assess whether driver
behavior changed after drivers saw and read these messages. Average speeds before the displayed
message and average speeds after the message was displayed were extracted from the simulator.
In addition, to ensure that drivers read the DMS message, the exact point that drivers initially
looked at the DMS was obtained using eye-tracking equipment.
5.1.1 “Slow Down” Message
The average speed for each driver was calculated by averaging the point speed recorded at
a frequency of 60 Hz. The average speed was calculated during two separate events. The “before”
event included driving along the roadway for approximately 1.5 miles upstream of the DMS and
before participants identified and read the DMS message. The “after” event included looking at
and reading the message on the DMS and driving along the roadway for approximately 1.5 miles.
Drivers’ eye gazes were recorded using the eye-tracking device. Figure 5.1 shows the average
speeds per gender for three age groups during the two events when the message “Slow Down”
(M6) was shown in the DMS.

33
Figure 5.1: Average Speeds and Standard Deviations for the “Slow Down” Message
Table 5.1 provides descriptive statistics of average speed measurements for the “Slow
Down” message. A comparison of the means among the 60 participants in the paired t-test resulted
in a p-value of 0.0001 (Table 5.2). The obtained p-value indicated a significant difference between
the means of the two phases of the drive. Therefore, the “Slow Down” DMS message significantly
affected driving speeds.
Table 5.1: Descriptive Statistics for Avg Speed (Slow Down)
Avg Speed Mean N Std. Deviation Std. Error Mean
Before 72.9305 60 5.36635 .69279
After 69.5352 60 5.98157 .77222
Table 5.2: Significance in 2-Tailed T-Test for Avg Speed (Slow Down)
Mean
Speed
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
3.39533 4.29701 0.55474 2.28530 4.50537 6.121 59 0.0001

34
In addition, a paired t-test was conducted to evaluate if the message affected certain age
groups or genders. Based on results shown in Table 5.3, a p-value of 0.0002 and 0.0041 (less than
0.025) was obtained for males and females, respectively, indicating that the speed of both male
and female drivers significantly changed after reading the message.
Table 5.3: T-Test Results for Avg Speed “Slow Down” Message by Gender Group
Gender
Mean
Speed
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
Male 4.47774 4.49217 0.80682 2.83000 6.12548 5.550 30 0.0002
Female 2.23828 3.82128 0.70959 0.78474 3.69181 3.154 28 0.0041
Average speed changes were also evaluated for three age groups (18–25, 26–50, and over
50 years old). As shown in the statistical results in Table 5.4, the DMS message significantly
affected driving speeds of the 18–25 and 26–50 age groups (p-values = 0.0003 and 0.0011,
respectively) but did not impact the older age group (over 50 years old), where the p-value was
greater than 0.025.
Table 5.4: T-Test Results for Avg Speed “Slow Down” Message by Age Group
Age
Group
Mean
Speed
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
18–25 4.48320 5.07487 1.01497 2.38840 6.57800 4.417 24 0.0003
26–50 2.73680 3.75747 0.75149 1.18579 4.28781 3.642 24 0.0011
50+ 2.32200 2.99066 0.94573 0.18261 4.46139 2.455 9 0.0363
5.1.2 “Speeding Kills” Message
Figure 5.2 shows the average speeds before and after study participants read the DMS
message “Speeding Kills” (M5).

35
Figure 5.2: Average Speeds and Standard Deviations for the “Speeding Kills” Message
Table 5.5 lists the descriptive statistics of the average speeds before and after the “Speeding
Kills” message was displayed. A comparison of the means among the 60 participants in the paired
t-test resulted in a p-value of 0.0003 (Table 5.6). The obtained p-value indicated a significant
difference between the means of the two phases of the driving test.
Table 5.5: Descriptive Statistics for Avg Speed (Speeding Kills)
Avg Speed Mean N Std. Deviation Std. Error Mean
Before 71.3872 60 5.25022 0.67780
After 67.4317 60 5.74255 0.74136
Table 5.6: Significance in 2-Tailed T-Test for Avg Speed (Speeding Kills)
Mean
Speed
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
3.24750 3.89572 0.50294 2.24113 4.25387 6.457 59 0.0003

36
Based on the paired t-test, a p-value less than 0.025, shown in Table 5.7, was obtained for
male and female participants, respectively, which indicates a significant difference between the
means.
Table 5.7: T-Test Results for Avg Speed “Speeding Kills” Message by Gender Group
Gender
Mean
Speed
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
Male 4.60097 4.56666 0.82020 2.92590 6.27603 5.610 30 0.0001
Female 1.80069 2.33220 0.43308 0.91357 2.68781 4.158 28 0.0003
In Table 5.8, the paired t-test results show that the youngest age group (18–25)
demonstrated a significant change in their speeding behavior after the “Speeding Kills” message
was displayed. For the other two age groups (26–50 and over 50), however, no significant
difference was found between the means of the speed during the two phases of the driving test.
Table 5.8: T-Test Results for Avg Speed “Speeding Kills” Message by Age Group
Age
Group
Mean
Speed
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
18–25 4.47400 4.17941 0.83588 2.74882 6.19918 5.352 24 <0.0001
26–50 2.37840 6.04536 1.20907 -0.11700 4.87380 1.967 24 0.0614
50+ 2.54700 3.10135 0.98073 0.32843 4.76557 2.597 9 0.0293
5.2 Car-Following Event
During the car-following event, measurements of a preferred gap (distance in ft) to the lead
vehicle were recorded. Gaps were collected every 60 Hz (1/60 s). The average gap value from the
beginning to the end of the car-following event was calculated for each participant. Slow-moving
cars were modeled in the simulator during this event to see if drivers altered their car-following
behavior after they saw the DMS message “Give Space, Don’t Tailgate” (M3). Figure 5.3 presents

37
the average gaps for all participants, based on age and gender groups, before and after seeing this
message while they were driving.
Figure 5.3: Average Gap for the “Give Space, Don’t Tailgate” Message
Preferred gap distance provides an insight into risky driver behavior. As shown in Figure
5.3, after the DMS was displayed, most drivers chose to follow longer gaps. Table 5.9 provides
descriptive statistics of average gaps for this message. Statistical analysis (Table 5.10) resulted in
a p-value of <0.0001, indicating a significant difference in the mean gaps of the two phases of the
driving test.
Table 5.9: Descriptive Statistics for Avg Gap (Give Space, Don’t Tailgate)
Avg Gap
Mean N Std. Deviation Std. Error Mean
Before 16.5000 60 4.24863 0.54850
After 24.9667 60 5.29140 0.68312
Table 5.10: Significance in 2-Tailed T-Test for Avg Gap (Give Space, Don’t Tailgate)
Mean Gap
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
-8.46667 5.53408 0.71445 -9.89627 -7.03706 -11.851 59 <0.0001

38
Maximum speed data were also recorded during the car-following event. Results showed
that maximum speeds were higher before the DMS message was displayed (mean velocity of 65.5
mph), compared to maximum speeds recorded after the DMS message was displayed (mean
velocity of 57.5 mph). On average, a 12.2% reduction in maximum speed was observed after the
DMS was displayed. Figure 5.4 and Table 5.11 show the resulting descriptive statistics and
variation of maximum speeds by gender and age group.
Figure 5.4: Maximum Speeds and Standard Deviations for the “Give Space, Don’t
Tailgate” Message
Table 5.11: Descriptive Statistics for Maximum Speed (Give Space, Don’t Tailgate)
Max Speed
Mean N Std. Deviation Std. Error Mean
Before 65.5167 60 3.16491 0.40859
After 57.5333 60 1.85460 0.23943
Statistical comparison between the average maximum speeds for this message showed that
participants changed their preferred speeds after seeing the “Give Space, Don’t Tailgate” message
(Table 5.12).

39
Table 5.12: Significance in 2-Tailed T-Test for Maximum Speed (Give Space, Don’t
Tailgate)
Mean
Speed
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
7.98333 3.93374 0.50784 6.96714 8.99953 15.720 59 0.0003
5.3 Move-Over Law
Each designed scenario contained three locations where the message “Move Over for Law
Enforcement and Maintenance Workers” (M4) could be observed. A value of 1 was assigned each
time participants moved over after reading the message. A maximum number of three observed
locations per scenario could be achieved by each participant. A value of zero was recorded if
participants did not move over at a location. Figure 5.5 shows the move-over events per age and
gender group before and after the message was displayed, and Table 5.13 shows the descriptive
statistics of those events.
Figure 5.5: Move-Over Events Observed for the “Move Over for Law Enforcement”
Message

40
Table 5.13: Descriptive Statistics for Move-Over Law
Events
Mean N Std. Deviation Std. Error Mean
Before 1.38 60 0.739 0.095
After 2.50 60 0.537 0.069
The paired t-test (Table 5.14) resulted in a p-value of 0.0001, which is less than 0.025,
indicating that the data obtained from the sample population succeeded in rejecti ng the null
hypothesis, thereby showing significant difference in driving behavior when the move-over DMS
was displayed.
Table 5.14: Significance in 2-Tailed T-Test for Move-Over Law
Move-
Over
Events
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
-1.117 0.783 0.101 -1.319 -0.914 -11.045 59 0.0001
5.4 Anti-Texting Messages
In this study, 10 text-related DMS messages were displayed in the driving scenario, with
the primary aim of discouraging texting while driving. Each driver received five text messages on
a cellphone when no DMSs were present on the roadway and five text messages after they had
been exposed to DMS messages. The numbers of text messages that the drivers responded to before
and after seeing the DMS were recorded, and then the number of text message responses was
further analyzed to evaluate which DMS message most effectively discouraged drivers from
texting. Table 5.15 lists the anti-texting DMS messages with their respective code numbers. Table
5.16 shows the descriptive statistics of texting responses for all 10 messages.

41
Table 5.15: Anti-Texting DMS Messages
Code
Messages
M1 Steering Wheel: Not A Hands-Free Device
M2 Pay Attention and Just Drive
M7 Drive Like Your Life Depends on It
M8 Get Your Head out of Your Apps
M9 One Text or Call Could Wreck It All
M10 Even Texting Drivers Hate Texting Drivers
M11 No Text Is Worth A Life
M12 What’s More Important, Your Text or Your Life?
M13 Don’t Let Texting Blind You
M14 Texting & Driving—It Can Wait
Table 5.16: Descriptive Statistics for Anti-Texting Messages
Code
Mean No. of
Texts
N
Std.
Deviation
Std. Error
Mean
M1
BEFORE
3.92
60
1.094
0.141
AFTER 1.02 60 1.242 0.160
M2
BEFORE 4.18 60 1.017 0.131
AFTER 3.77 60 1.155 0.149
M8
BEFORE 3.70 60 1.280 0.165
AFTER 0.60 60 0.942 0.122
M9
BEFORE 3.72 60 1.277 0.165
AFTER 2.17 60 1.729 0.223
M10
BEFORE 3.88 60 1.043 0.135
AFTER 3.33 60 1.323 0.171
M11
BEFORE 4.02 60 1.049 0.135
AFTER 1.35 60 1.505 0.194
M12
BEFORE 3.87 60 1.033 0.133
AFTER 2.33 60 1.602 0.207
M13
BEFORE 3.72 60 1.027 0.133
AFTER 3.58 60 1.197 0.155
M14
BEFORE 3.75 60 1.068 0.138
AFTER 3.30 60 1.139 0.147
M7
BEFORE 3.63 60 1.041 0.134
AFTER
3.35
60
1.162
0.150

42
Table 5.17 shows the results of the statistical comparison of the number of text messages
sent by the participants before and after seeing the anti-texting DMS messages. As shown in the
table, the p-value in the paired t-test was greater than 0.025 for messages M2, M10, M13, M14,
and M7. However, for messages M1, M8, M9, M11, and M12, the paired t-test p-values were less
than 0.025. Therefore, the most effective messages for altering drivers’ texting behavior were
“Steering Wheel: Not A Hands-Free Device,” “Get Your Head out of Your Apps,” “One Text or
Call Could Wreck It All,” “No Text Is Worth A Life,” and “What’s More Important, Your Text or
Your Life?”
Table 5.17: Significance in 2-Tailed T-Tests for Anti-Texting Messages
Code
Mean
Difference
Std.
Dev
Std.
Error
Mean
95% CI of the
Difference
t df p-value
Lower Upper
M1 2.900 1.623 0.210 2.481 3.319 13.841 59 0.0002
M2 0.417 1.544 0.199 0.018 0.815 2.091 59 0.0410
M8 3.100 1.298 0.168 2.765 3.435 18.500 59 0.0004
M9 1.550 2.143 0.277 0.997 2.103 5.604 59 0.0002
M10 0.550 1.534 0.198 0.154 0.946 2.777 59 0.0730
M11 2.667 1.847 0.238 2.189 3.144 11.182 59 0.0001
M12 1.533 1.789 0.231 1.071 1.996 6.637 59 0.0000
M13 0.133 1.420 0.183 -0.233 0.500 0.727 59 0.4700
M14 0.450 1.610 0.208 0.034 0.866 2.166 59 0.0340
M7 0.283 1.519 0.196 -0.109 0.676 1.445 59 0.1540
5.5 Summary of Results
Table 5.18 summarizes all messages that were evaluated in the driving simulator
experiment. Statistical analysis showed that 10 of the 14 messages were statistically significant for
affecting driver behavior.

43
Table 5.18: Significance in 2-Tailed T-Test for DMS Messages
DMS Message Variable Phase Mean p-value
Rejected Null
Hypothesis
Slow Down
Average Speed
(mph)
Before 72.93
0.0001 Yes
After 69.54
Speeding Kills
Average Speed
(mph)
Before 71.39
0.0003 Yes
After 67.43
Give Space, Don’t
Tailgate
Gap (feet)
Before 16.5
<0.0001 Yes
After 24.97
Maximum
Speed (mph)
Before 65.52
0.0003 Yes
After 57.53
Move Over for Law
Enforcement
Total Observed
Before 1.38
0.0001 Yes
After 2.5
Steering Wheel:
Not A Hands-Free
Device
Text Message
Responded
Before 3.92
0.0002 Yes
After 1.02
Pay Attention and
Just Drive
Text Message
Responded
Before 4.18
0.0410 No
After 3.77
Get Your Head out
of Your Apps
Text Message
Responded
Before 3.7
0.0004 Yes
After 0.6
One Text or Call
Could Wreck It All
Text Message
Responded
Before 3.72
0.0002 Yes
After 2.17
Even Texting
Drivers Hate
Texting Drivers
Text Message
Responded
Before 3.88
0.0730 No
After 3.33
No Text Is Worth A
Life
Text Message
Responded
Before 4.02
0.0001 Yes
After 1.35
What’s More
Important, Your
Text or Your Life?
Text Message
Responded
Before 3.87
<0.0001 Yes
After 2.33
Don’t Let Texting
Blind You
Text Message
Responded
Before 3.72
0.4700 No
After 3.58
Texting & Driving—
It Can Wait
Text Message
Responded
Before 3.75
0.0340 No
After 3.3
Drive Like Your
Life Depends on It
Text Message
Responded
Before 3.63
0.1540 No
After 3.35
44
Chapter 6: Conclusions and Recommendations
6.1 Summary
The objective of this project was to investigate the effectiveness of entertaining, non-
traffic-related messages in influencing driver behavior. To accomplish this objective, two main
data collection efforts were undertaken. The first data collection effort included an online survey
questionnaire that was administered to 100 participants. The questionnaire included several
messages currently displayed on DMSs and requested feedback on their perceived effectiveness.
The second data collection was done via a driving simulator experiment, during which 60
participants (31 males and 29 females) of diverse demographics drove past several DMSs that
displayed a variety of messages. These messages were categorized as speeding (2 messages), car-
following (1 message), move-over law (1 message), and anti-texting (10 messages). Participants
were surveyed at the end of the experiment, and their responses were compared with responses
from the online survey. Behavioral data (speeds, gaps, gazes, etc.) were extracted from the driving
simulator experiment and then reduced. Statistical analyses were performed to evaluate to what
extent the message content affected the driving behavior of the study participants.
6.2 Conclusions
The following conclusions were obtained from the analysis:
• Significant differences were found in the study between some of the
collected variables. Participants drove at significantly lower average speeds
after seeing the two speeding-related DMS messages (“Speeding Kills” and
“Slow Down”) in all the events configured to capture this variable.
• The gap was significantly lower after showing the DMS message “Give
Space, Don’t Tailgate,” proving that this message helped reduce tailgating.
• A significant increase in maintaining the move-over law was observed after
the “Move Over for Law Enforcement” message was displayed.
• Not all anti-texting messages yielded significant changes in drivers’ texting
behavior. Of the 10 displayed messages, only 5 effectively changed drivers’
texting behavior. Those messages were “Steering Wheel: Not A Hands-Free
45
Device,” “Get Your Head out of Your Apps,” “One Text or Call Could
Wreck It All,” “No Text Is Worth A Life,” and “What’s More Important,
Your Text or Your Life?”
• Based on the survey results, 91% of the drivers stated that the “Move Over
for Law Enforcement” was an effective message to show on a DMS.
• In addition, the following effective messages were identified: “Give Space,
Don’t Tailgate,” “Speeding Kills—Arrive Alive,” and “No Text Is Worth A
Life” (82%); “Click It or Ticket” (78.34%); “You Drink. You Drive. You
Lose.” (74.44%); “Slow Down” and “Head Up Phone Down” (70%).
6.3 Recommendations and Future Research
The following recommendations and steps for future work are proposed:
• The effects of DMS on tired/fatigued drivers should be assessed to provide
key insights into the role of DMS for changing driving behavior.
• Future research should investigate the possible effects of DMS on
distraction, using longer messages in more challenging driving
environments.
• Drivers in this study used a different phone and some were not familiar with
using their phones for text messaging. It is possible that drivers’ familiarity
and adeptness at using another phone may have attenuated any differences
in texting behaviors.
• A separate study could investigate the effects of DMS on drivers who
typically text too much while driving. In the current study, older drivers
were less comfortable with texting than younger drivers, and some drivers
preferred not to use their phones at all while driving.
• Based on the survey, drivers thought some messages that were not used in
the simulator study would be effective. A follow-up research could evaluate
the effectiveness of those unused messages.
46
• Drinking and driving is a serious safety issue, and while drivers thought it
would be a good idea to show anti-drinking and driving messages, the
effects of those messages are difficult to study with a driving simulator.
Future studies could evaluate the impact of anti-drinking and driving
campaigns.
• The duration of the driving simulator experiments was 60 min. Some drivers
felt exhausted after driving the simulator for 30 min, and most participants
suggested a drive duration of 20–25 min.

47
References
Adler, J. L., & Kalsher, M. J. (1994). Human factors studies to investigate driver behavior under
in-vehicle information systems: An interactive microcomputer simulation approach.
Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 38(9), 461–
465.
Adler, J. L., Recker, W. W., & McNally, M. G. (1993). A conflict model and interactive simulator
(FASTCARS) for predicting enroute driver behavior in response to real-time traffic
condition information. Transportation, 20, 83–106.
Benson, B. G. (1996). Motorist attitudes about content of variable-message signs. Transportation
Research Record, 1550, 48–57.
Capustiac, N. A., & Napoca, C. (2011). Development and application of smart actuation methods
for vehicle simulators [Doctoral dissertation]. University of Duisburg-Essen, Duisburg,
Germany.
Emmerink, R., Nijkamp, P., Rietveld, P., Van Ommeren, J. (1996). Variable message signs and
radio traffic information: An integrated empirical analysis of drivers’ route choice behavior.
Transportation Research Part A: Policy and Practice, 30(2), 135–153.
IBM. (2011). IBM SPSS Statistics 20 Core System User’s Guide. IBM Corporation.
Jamson, H. (2000). Driving simulator validity: Issues of field of view and resolution. In
Proceedings of the Driving Simulation Conference, DSC 2000, Paris, France (pp. 57–64).
Jamson, A. H., & Merat, N. (2007). The effectiveness of safety campaign VMS messages – A
driving simulator investigation. In Proceedings of the Fourth International Driving
Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, July 9-
12, 2007, Stevenson, Washington (pp. 459–465). Retrieved from
https://doi.org/10.17077/drivingassessment.1277
Kemeny, A., & Panerai, F. (2003). Evaluating perception in driving simulation experiments. Trends
in Cognitive Sciences, 7(1), 31–37.
Lee, W. S., Sung, D. H., Lee, J. Y., Kim, Y. S., & Cho, J. H. (2007). Driving simulation for
evaluation of driver assistance systems and driving management systems. DSC North
America – Iowa City – September 2007.
48
Levine, O., & Mourant, R. (1995). A driving simulator based on virtual environments technology
(Paper No. 950269). Presented at the 74th Annual Meeting of the Transportation Research
Board, Washington, D.C.
Luoma, J., & Rämä, P. (2001). Comprehension of pictograms for variable message signs. Traffic
Engineering & Control, 42(2), 53-58.
Miller, J. S., Smith, B. L., Newman, B. R., & Demetsky, M. J. (1995). Effective use of variable
message signs: Lessons learned through development of users’ manuals. Transportation
Research Record, 1495, 1–8.
Mitran, E., Cummins, D., & Smithers, A. (2018). Traffic safety messages on dynamic message
signs (DMS) (Report No. FHWA/LA.18/17-01TA-SA). Baton Rouge, LA: Louisiana
Transportation Research Center.
National Advanced Driving Simulator (NADS). (2015). MiniSim user’s guide (Document version
19). Iowa City, IA: The University of Iowa.
National Advanced Driving Simulator (NADS). (2016). TMT user’s guide. Iowa City, IA: The
University of Iowa.
Slob, J. J. (2008). State-of-the-art driving simulators, a literature survey (DCT 2008.107).
Eindhoven, Netherlands: Eindhoven University of Technology.
Tay, R., & de Barros, A. G. (2008). Public perceptions of the use of dynamic message signs.
Journal of Advanced Transportation, 42(1), 95–110.
Tay, R., & de Barros, A. G. (2010). Effectiveness of road safety messages on variable message
signs. Journal of Transportation Systems Engineering and Information Technology, 10(3),
18–23.
The MathWorks, Inc. (1996). MATLAB language reference manual (Version 5). Natick, MA:
Author.
Vaughn, K. M., Abdel-Aty, M. A., Kitamura, R., & Jovanis, P. P. (1992). Experimental analysis
and modeling of sequential route choice under ATIS in a simple traffic network. Berkeley,
CA: California Partners for Advanced Transit and Highways (PATH), UC Berkeley.
49
Appendix A: Survey Questionnaire
1. What types of messages do you usually notice when driving on the highways? (Check all that
apply)
a. Travel time-related messages
b. Crash related messages
c. Construction-related messages
d. Weather-related messages
e. Safety-related messages

50
2. Respond to the following statements
Strongly
Disagree
Disagree
Neither
agree nor
disagree
Agree
Strongly
agree
It`s a good idea to…
Remind drivers not to follow too closely on the road
Remind drivers to be courteous on the road
Remind drivers of hazardous weather conditions
Display general safety messages on the highway message boards
Display anti-speeding messages on the highway message boards
Display drunk driving messages on the highway message boards
Display anti-texting and driving messages on the highway message boards
Display seat belt messages on the highway message boards
Display weather warning messages
I look at the information on highway message boards when they are displayed
I think about the information displayed on highway message board
In general, safety-related messages…
remind me to check my following distance
reduce my likelihood of speeding
remind me not to text while driving
remind me not to drive after consuming alcohol
remind me to pay more attention while driving
remind me to always use the seat belt while driving
remind me to move over for law enforcement or maintenance workers

51
3. Rate these messages in terms of their effectiveness
Messages
Effectiveness
Very
effective
Somewhat
effective
Neutral
Not so
effective
Not at all
effective
Click it or Ticket
Click it, Don’t Risk It
Buckle Up, Every Trip, Every Time
Head Up Phone Down
A Steering Wheel is Not a Hands-Free Device
Slow Down, Ride Like Your Life Depends on It
Speeding Kills – Arrive Alive
Tomorrow is the Reward for Safe Driving
Don’t Text and Drive, It Can Wait
Just Drive
You Drink You Drive You Lose
Drunk Driving – Don’t Let Cheers Turn into Tears
Drive High Get a DUI

52
4. Rate these messages in terms of their effectiveness
Messages
Effectiveness
Very
effective
Somewhat
effective
Neutral
Not so
effective
Not at all
effective
Steering Wheel: Not a hands-free device
Pay Attention and Just Drive
Give space, don`t tailgate
Move Over for Law Enforcement and Maintenance
Workers
Speeding Kills
Slow Down
Drive like your life depends on it
Get your head out of your apps
One text or call-Could wreck it all
Even Texting Drivers Hate Texting Drivers
No text is worth a life
What’s more important, your text or your life?
Don’t let texting blind you
Texting & driving- it can wait

