
About Argonne National Laboratory
Argonne is a U.S. Department of Energy laboratory managed by UChicago Argonne, LLC
under contract DE-AC02-06CH11357. The Laboratory’s main facility is outside Chicago,
at 9700 South Cass Avenue, Argonne, Illinois 60439. For information about Argonne
and its pioneering science and technology programs, see www.anl.gov.
DOCUMENT AVAILABILITY
Online Access: U.S. Department of Energy (DOE) reports produced after 1991 and a
growing number of pre-1991 documents are available free via DOE’s SciTech Connect
(http://www.osti.gov/scitech/)
Reports not in digital format may be purchased by the public from the
National Technical Information Service (NTIS):
U.S. Department of Commerce
National Technical Information Service
5301 Shawnee Rd
Alexandria, VA 22312
www.ntis.gov
Phone: (800) 553-NTIS (6847) or (703) 605-6000
Fax: (703) 605-6900
Email: [email protected]
Reports not in digital format are available to DOE and DOE contractors from the
Office of Scientific and Technical Information (OSTI):
U.S. Department of Energy
Office of Scientific and Technical Information
P.O. Box 62
Oak Ridge, TN 37831-0062
www.osti.gov
Phone: (865) 576-8401
Fax: (865) 576-5728
Email: [email protected]
Disclaimer
This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States
Government nor any agency thereof, nor UChicago Argonne, LLC, nor any of their employees or officers, makes any warranty, express
or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus,
product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific
commercial product, process, or service by trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply
its endorsement, recommendation, or favoring by the United States Government or any agency thereof. The views and opinions of
document authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof,
Argonne National Laboratory, or UChicago Argonne, LLC.

i
Table of Contents
Table of Contents ............................................................................................................................. i
Figures............................................................................................................................................. v
Tables .............................................................................................................................................. v
List of Acronyms ........................................................................................................................... vi
Acknowledgment ........................................................................................................................... ix
1 Introduction ............................................................................................................................. 1
1.1 Overview ....................................................................................................................... 2
1.2 Functional Scopes and Responsibilities of DMS, DERMS, and Microgrids ............... 2
1.3 Relationships among DMS, DERMS, and Microgrid Controllers ............................... 4
2 DMS – Current Status and New Challenges ........................................................................... 7
2.1 Current Status of DMS Development ......................................................................... 10
2.1.1 Passive and Radial Distribution Network with One-Way Power Flow ........ 10
2.1.2 Advanced Applications in DMS .................................................................... 11
2.1.3 Protection Schemes ....................................................................................... 18
2.1.4 Simplified Implementations – Expansion from SCADA System ................. 19
2.2 Advanced DMS ........................................................................................................... 19
2.2.1 Enterprise Integration with OMS, AMI, and DRM ....................................... 19
2.2.2 Data Communication between DMS and OMS, AMI, and DRM ................. 20
2.3 Penetration of DER ..................................................................................................... 22
2.3.1 Impacts of DER on Distribution Grid Operation .......................................... 22
2.3.2 DER Modeling in DMS ................................................................................. 23
2.3.3 Impacts on DMS Advanced Applications ..................................................... 23
2.3.4 Impacts on the Protection Scheme ................................................................ 26
2.4 Connection of Microgrids ........................................................................................... 27
2.4.1 Connection Modes ......................................................................................... 27
2.4.2 Interface at the PCC ...................................................................................... 27
2.4.3 Power Exchange ............................................................................................ 27
2.4.4 Mutual Support in an Emergency .................................................................. 27
2.4.5 Protection Scheme ......................................................................................... 28
3 Microgrid Operation .............................................................................................................. 29
3.1 Basic Concepts of Microgrid Operation ..................................................................... 29
3.2 Basic Requirements for a Microgrid Connecting to a Distribution Grid .................... 29
ii
3.2.1 Response to Normal Conditions .................................................................... 29
3.2.2 Response to Abnormal Conditions ................................................................ 30
3.3 Point of Common Coupling ........................................................................................ 32
3.4 Generation Resources and Types ................................................................................ 32
3.5 Voltage/VAR, Frequency, and Load Following ......................................................... 32
3.6 Connection to and Disconnection from the Distribution Grid .................................... 32
3.7 Intentional and Unintentional Disconnection ............................................................. 33
3.8 Internal Protection ....................................................................................................... 33
4 Distributed Energy Resources ............................................................................................... 35
4.1 Basic DER Types ........................................................................................................ 35
4.2 Basic Requirements for DER Connecting to the Distribution Grid ............................ 35
4.3 Communication Requirements.................................................................................... 36
4.3.1 Scalability ...................................................................................................... 36
4.3.2 Bandwidth ..................................................................................................... 36
4.3.3 Quality of Service .......................................................................................... 36
4.3.4 Data Quantity and Storage ............................................................................ 37
4.3.5 Data Content .................................................................................................. 37
4.3.6 Cybersecurity ................................................................................................. 37
4.3.7 Interoperability .............................................................................................. 37
4.4 Volt/VAR Characteristics ........................................................................................... 37
4.5 Real and Reactive Power Characteristics and Control ............................................... 38
4.6 Fluctuation and Intermittency ..................................................................................... 38
4.7 Harmonics ................................................................................................................... 39
5 Distributed Energy Resources Management System............................................................. 41
5.1 Objectives and Functionalities .................................................................................... 41
5.2 Group Structures and Aggregation Policies ................................................................ 41
5.3 Operation Rules and Resource Optimization .............................................................. 41
5.4 Controls and Monitoring of Individual DER .............................................................. 42
5.5 Generation Forecasting of DER .................................................................................. 42
5.6 Impacts of DERMS on DMS ...................................................................................... 42
6 DMS Integration with Microgrids ......................................................................................... 43
6.1 Data Communication between the DMS and Microgrid ............................................ 43
6.2 Operation Rules for Both the DMS and the Microgrid............................................... 47
6.3 Synchronization and Connection/Disconnection ........................................................ 48
iii
6.4 Microgrid Control while Integrated with DMS .......................................................... 49
6.4.1 Frequency Control and Load Following ....................................................... 49
6.4.2 Volt/VAR Control ......................................................................................... 49
6.4.3 Emergency Support ....................................................................................... 50
6.5 Resource Optimization in Microgrid .......................................................................... 50
6.6 Energy Transactions and Wheeling between the Distribution Grid and Microgrid ... 50
6.7 DMS Function Enhancement with Microgrid Integration .......................................... 51
6.8 Protection Schemes ..................................................................................................... 51
6.9 Responsibilities of Microgrids and DMS in Integrated Operation ............................. 52
6.9.1 Responsibilities of Microgrids ...................................................................... 52
6.9.2 Responsibilities of DMS ............................................................................... 52
7 DMS Integration with the DERMS ....................................................................................... 53
7.1 Data Communication between the DMS and the DERMS ......................................... 53
7.1.1 Model Sharing ............................................................................................... 53
7.1.2 Operation Data Communication .................................................................... 55
7.2 Responsibilities of the DERMS for DMS ................................................................... 56
7.3 Responsibilities of the DMS for the DERMS ............................................................. 56
7.4 Operation of DER under the DERMS Connecting to the Distribution Grid .............. 56
7.4.1 Impacts of DER on Distribution Power Quality ........................................... 57
7.4.2 Volt/VAR Support and Control ..................................................................... 57
7.5 Strategies and Policies for Emergency Control and Management.............................. 57
8 DMS Design Principles for Integration with DERMS and Microgrids ................................. 59
8.1 DER and Microgrid Modeling in DMS ...................................................................... 59
8.1.1 DMS Model ................................................................................................... 59
8.1.2 Modeling DER in DMS ................................................................................. 60
8.1.3 Modeling Microgrids in DMS ....................................................................... 60
8.2 Data Exchange Requirements ..................................................................................... 60
8.2.1 Data Exchange between DMS and Microgrids ............................................. 60
8.2.2 Data Exchange between the DMS and DERMS ........................................... 61
8.3 Advanced DMS Applications for Active Distribution Networks ............................... 62
8.3.1 Topology Processor ....................................................................................... 63
8.3.2 On-line Power Flow ...................................................................................... 63
8.3.3 Short-Circuit Analysis ................................................................................... 63
8.3.4 Fault Location, Isolation, and Service Restoration ....................................... 63
iv
8.3.5 Volt/VAR Optimization ................................................................................ 64
8.3.6 Optimal Network Reconfiguration ................................................................ 64
8.4 Monitoring and Control Requirements ....................................................................... 64
8.5 Communication System Requirements ....................................................................... 64
8.5.1 Bandwidth ..................................................................................................... 65
8.5.2 Quality of Service .......................................................................................... 65
8.5.3 Data Storage .................................................................................................. 65
8.5.4 Cybersecurity ................................................................................................. 65
8.5.5 Interoperability .............................................................................................. 65
8.5.6 Other Requirements ....................................................................................... 66
8.6 Integrated Operation of DMS with Microgrids, DER, and DERMS .......................... 66
8.6.1 Integration Approaches ................................................................................. 66
8.6.2 More Than One Active PCC in a Microgrid ................................................. 68
8.6.3 Phase Balancing of DER ............................................................................... 68
8.7 Protection Schemes for Microgrids/DER and the Distribution Grid .......................... 68
8.7.1 Faults in Microgrids ...................................................................................... 68
8.7.2 Faults in DER ................................................................................................ 69
8.7.3 Faults in the Distribution Grid ....................................................................... 69
8.7.4 Distribution Grid Protection with Microgrids and DER Connected ............. 69
8.8 Use Cases for the Integration of Microgrid Controller, DERMS, and DMS .............. 70
9 Summary and Conclusion ...................................................................................................... 71
9.1 Challenges and Objectives .......................................................................................... 71
9.2 Current Status of DMS and New Challenges ............................................................. 71
9.3 DMS Integration with Microgrids .............................................................................. 72
9.4 DMS Integration with DERMS .................................................................................. 72
9.5 Protection Schemes ..................................................................................................... 72
9.6 Design Principles of DMS Integration ........................................................................ 73
10 References ............................................................................................................................. 75
Appendix A: Distribution Management System Functions ........................................................ A-i
Appendix B: Distribution Management System Industry Survey ............................................... B-i
v
Figures
2-1 Reference Layout and Structure of a DMS ............................................................................. 8
2-2 Example of Full Integration of DMS via ESB ........................................................................ 9
2-3 Example of Partial Integration of DMS via ESB .................................................................... 9
2-4 Integration of DMS via Direct Connection ........................................................................... 10
2-5 Schematic Diagram of a Conventional Feeder Circuit .......................................................... 11
2-6 Feeder Circuit Protection Coordination ................................................................................. 19
2-7 Advanced DMS System Integration ...................................................................................... 20
2-8 Data Communication between DMS and OMS .................................................................... 21
2-9 Data Communication between DMS and AMI ..................................................................... 21
2-10Data Communication between DMS and DRM .................................................................... 22
4-1 Voltage/VAR Characteristics of a DER ................................................................................ 38
4-2 kW and kVAR Operation Range of a DER ........................................................................... 39
6-1 Wheeling Path in a Microgrid – Inner-Feeder Loops ............................................................ 44
6-2 Wheeling Path in a Microgrid – Inter-Feeder Loop .............................................................. 44
6-3 Data Communication and Function Mapping between a Microgrid Controller and a DMS 46
6-4 Control Signals Generated by the Advanced Applications to Adjust the Operation of the
Microgrid ....................................................................................................................... 47
6-5 Simplified Microgrid Topology in DMS ............................................................................... 48
7-1 A Typical Connection of DER at a Feeder and User Transformers ...................................... 54
7-2 An Organizational Hierarchy of Individual DER .................................................................. 54
7-3 Data Communication between the DMS and DERMS ......................................................... 55
8-1 Integration of Microgrid Controllers and DERMS into the Existing Control Systems of
Distribution Grids ....................................................................................................................... 59
8-2 DMS Integration with DERMS and Microgrids through ESB .............................................. 67
Tables
3-1 Interconnection System Response to Abnormal Voltages ................................................... 31
3-2 Interconnection System Response to Abnormal Frequencies ............................................... 32
4-1 Maximum Harmonic Current Distortion in Percentage of the Fundamental Current ........... 39
vi
List of Acronyms
AM Asset Management
AMI Advanced Metering Infrastructure
AOR Area of Responsibility
CBM Condition-Based Maintenance
CHP Combined Heat and Power
CIP Critical Infrastructure Protection
CSM Cyber Security Manager
CVR Conservation Voltage Reduction
DA Distribution Automation
DER Distributed Energy Resources
DERMS Distributed Energy Resource Management System
DG Distributed Generation
DMM Data & Model Management
DMS Distribution Management System
DNP3 Distributed Network Protocol, Version 3
DOE U.S. Department of Energy
DR Demand Response
DRM Demand Response Management
DRMS Demand Response Management System
DSCADA Distribution Supervisory Control and Data Acquisition
DTS Dispatcher Training Simulator
EEDR Energy Efficiency and Demand Reduction
ESB Enterprise Integration Bus
ELS Emergency Load Shedding
EMS Energy Management System
EPRI Electric Power Research Institute
ESB Enterprise Service Bus
EVMS Electric Vehicle Management System
FAN Field Area Network
FCI Faulted Circuit Indicator
FLISR Fault Location, Isolation, and Service Restoration
GIS Geographical Information System
GUI Graphical User Interface
HIS Historical Information System
HV High-Voltage
MV Medium-Voltage
vii
IAP Intelligent Alarm Processing
ICCP Inter-Control Center Protocol
IEC International Electrotechnical Commission
IED Intelligent Electronic Device
IEEE Institute of Electrical and Electronics Engineers
IEEE PES IEEE Power & Energy Society
IOU Investor-Owned Utility
IPP Independent Power Producer
IT Information Technology
kVA kilovolt-ampere
kW kilowatt
LTC Load Tap Changer
MC Microgrid Controller
MDMS Meter Data Management System
M&V Measurement & Verification
ms millisecond
NUG Non–Utility Generator
OC Overcurrent
OLPF On-Line Power Flow
OMS Outage Management System
ONR Optimal Network Reconfiguration
OV Overvoltage
PCC Point of Common Coupling
PEV Plug-in Electric Vehicle
PFL Predictive Fault Location
PV Photovoltaic
QoS Quality of Service
RDBMS Relational Database Management System
RF Radio Frequency
RFP Request for Proposal
RTU Remote Terminal Unit
s second
SAIDI System Average Interruption Duration Index
SCA Short-Circuit Analysis
SCADA Supervisory Control and Data Acquisition
SE State Estimation
SI System Integrator
viii
SOM Switch Order Management
STLF Short-Term Load Forecasting
TP Topology Processor
UI User Interface
UV Undervoltage
V volt
VGU Virtual Generation Unit
VVC Volt/VAR Control
VVO Volt/VAR Optimization
ix
Acknowledgment
This report was prepared by UChicago Argonne, LLC, operator of Argonne National Laboratory.
Argonne’s work was supported by the U.S. Department of Energy under contract DE-AC02-
06CH11357.
The authors wish to acknowledge the sponsorship and guidance provided by Dan Ton of the
U.S. Department of Energy (DOE) Office of Electricity Delivery and Energy Reliability. We
would also like to extend our special appreciation to James Reilly for his advice throughout the
project; and to Jiyuan Fan from Southern State, LLC., and Arindam Maitra and Brian Seal from
the Electric Power Research Institute (EPRI) for their valuable suggestions. Special thanks as
well to Bob Uluski, Chair, Task Force on Distribution Management Systems for the IEEE Power
and Energy Society, for his many contributions during the research for this report.
x
This page is intentionally left blank.
1
1 Introduction
Grid modernization calls for distribution management systems (DMS) that meet fundamental
challenges to distribution grid operations from high-penetration distributed energy resources
(DER), behind-the-meter generation, two-way power flows, and microgrids. This modernization
effort requires enhanced DMS functionality that interacts with distributed control systems — an
advanced DMS.
With the development of the smart grid in recent years, advanced measurement and control
devices, such as automated distribution circuit reclosers and sectionalizers, are being installed in
utility distribution networks to improve reliability under both normal and event-driven operations.
With advances in grid telemetry, enabling two-way information exchange between utilities and
consumers, it is now possible for grid operators to have access to near-real-time data
measurement for control of distribution circuits, substations, transformers, switches, and relays.
On the consumer side, the fast-growing development and deployment of smart grid solutions,
such as advanced metering infrastructure (AMI), demand response (DR), aggregated DER, and
microgrids, create challenges for distribution management and control. For example, the output
of behind-the-meter DER may not be visible to distribution system operations. The inherent
uncertainty and variability of energy sources such as distributed photovoltaic (PV) may cause
voltage control issues on the feeders of the distribution system.
Grid modernization requires advanced DMS that can integrate and further enhance existing
customer information systems (CIS); geographic information systems (GIS); outage management
system (OMS); energy management system (EMS); and other information and control systems
available at utilities to improve their visibility, control, and support analytics. An advanced DMS
can realize comprehensive and optimal monitoring and control of distribution systems, which are
critical to taking full advantage of smart grid investments and enhancing the value of both utility-
owned and customer-owned assets. (Common, emerging, and/or required DMS functions are
discussed in Section 2 and in Appendix A).
The implementation of DMS varies across utilities (see Distribution Management System
Industry Survey, Appendix B). While some utilities have just begun planning for DMS
implementation, others are already far along in the process. Some DMS applications such as fault
location isolation and service restoration (self-healing), Volt/VAR optimization (VVO), on-line
power flow (OLPF), and switch order management (SOM) have gained wide acceptance. There
is a growing consensus on the need for new applications for control and management of
distribution systems with high-penetration DER and microgrids. This need requires an advanced
DMS that integrates the functionality and capabilities of the DMS with those of DER
management systems (DERMS) and microgrid controllers (MC).
2
1.1 Overview
Conventionally, distribution grids are generally passive networks with power flows that travel
solely in one direction from source substations down to individual passive consumer loads. In
addition, the distribution networks are largely configured to operate radially, which further
ensures that power flow takes a single path between the source and a consumer load in either
normal operation or a faulted condition. When DER and microgrids are connected to the
distribution network, the conventional features mentioned above no longer exist, even though a
network would still be configured radially. This result occurs because distribution grids generally
become active networks, and power flows become two-way flows. The actual flow directions of
individual circuit sections will depend on load distributions and the output contributions of
dispersed DER and microgrids from time to time.
With high-level penetration of DER in a distribution grid, it may be necessary to have a DERMS
to aggregate, control, and manage the operation of the DER dispersed widely in the network. A
DERMS can be mainly responsible for aggregating the dispersed DER into different energy
resource groups, achieving energy optimization for the overall distribution grid, and also
possibly participating in energy transaction bidding at the transmission level of energy trading.
Individual DER connected to a distribution grid may be broadly classified by a DERMS/DMS as
either a directly monitored/controlled DER or as an indirectly monitored/controlled DER. The
same classification rule may also apply to microgrids connected to the distribution grid. For
example, indirectly monitored DER may have small capacities (e.g., 10 kW or less) and may be
represented simply as negative loads, allowing them to be merged with the ordinary loads in a
DMS. However, a larger microgrid or a major DER, especially an aggregated DER in a DERMS,
may have considerable capacity, and its operation may have impacts on distribution grid
operation that cannot be ignored and may need to be well modeled, monitored, controlled, and
coordinated with the DMS for reliable operation and control in providing quality power delivery
to consumers in the distribution grid.
This guideline focuses on the integration of DMS with DERMS and microgrids connected to the
distribution grid by defining generic and fundamental design and implementation principles and
strategies. It starts by addressing the current status, objectives, and core functionalities of each
system, and then discusses the new challenges and the common principles of DMS design and
implementation for integration with DERMS and microgrids to realize enhanced grid operation
reliability and quality power delivery to consumers while also achieving the maximum energy
economics from the DER and microgrid connections.
1.2 Functional Scopes and Responsibilities of DMS, DERMS, and Microgrids
A distribution system is generally considered to be part of an electric power grid and is usually
extended from the primary (high-voltage [HV]) buses of distribution substation transformers all
the way to distribution service transformers through distribution feeder circuits. It may cover a
large geographical area with many distribution substations or a small area with one or a few
substations. It may also be extended to cover a certain part of the sub-transmission network, if it
exists, that supplies the primary buses of the distribution substation transformers and/or by being
extended down further to the lower voltage network on the secondary side of the distribution
service transformers. A distribution system may be owned by a single power utility or by more
3
than one, with each owning part of the system; or there may be mixed ownership may that is
shared among utilities and customers, or independent energy/service providers, etc.
A distribution system may be operated under a single DMS’s monitoring and control, or it may
be partitioned into several subsystems geographically, with each subsystem having a dedicated
DMS. A DMS may be assigned to control and manage a single distribution system, multiple
systems, or multiple subsystems; however, a single system or a subsystem should be under only
one DMS at a time, although it may have one or more backup DMS for fail-over in actual
operation.
Traditionally, a DMS is fully responsible for overall operation reliability, power delivery quality,
grid economics (minimum energy losses), and all of the normal and emergency controls of the
distribution system or subsystem, including maintaining an acceptable voltage profile. A DMS
may operate in an integrated environment with other associated systems (e.g., the advanced
metering infrastructure [AMI] and demand response management system [DRMS]); however,
the other systems do not interfere with the tasks of the DMS within the scope of the overall
distribution grid operation assigned to the DMS.
A microgrid is a small and local distribution grid having its own energy resources and loads. It
may operate independently as an islanded grid or be connected to the utility distribution grid
(i.e., grid-connected mode). Similar to utility distribution grids, a microgrid may be owned by a
utility or a customer or both with each one owning part of the microgrid. Regardless of how its
ownership is allocated, the microgrid generally has a unique controller or control system that is
located at the site of the microgrid and is fully responsible for the operation of the microgrid. The
controller or control system should also be responsible for ensuring an acceptable voltage profile
and maintaining continuous power exchange at the point of common coupling (PCC) connecting
it to the utility distribution grid. In the island mode, the MC has to maintain the energy balance
and frequency within the allowable deviation. It should be noted that the concept of an MC can
be limited to a regional system with a relatively smaller scale. However, it also applies to larger
systems. In this case, the MC can be used as a fully functional control unit. Particularly in the
case of islanding operation, it can be regarded as a local DMS.
A DERMS is designed to manage and control widely dispersed DER in the distribution system.
As discussed in the report by the Electric Power Research Institute (EPRI) [1], DER
management is achieved by using a DERMS. Meanwhile, the interactive operation of an MC and
a DERMS is investigated in [1]. Providing four main functions, a DERMS:
• Aggregates: A DERMS takes the services of millions of individual DER and presents
them as a smaller, more manageable number of aggregated virtual resources.
• Simplifies: A DERMS handles the complex and granular details of DER settings and
presents DER capabilities as simple, grid-related services that are consistent with DMS
needs.
• Optimizes: A DERMS optimizes the utilization of DER within various groups to obtain
the desired outcome at minimal cost, maximum utilization, and best possible power
quality.
4
• Translates: Individual DER may “speak” different languages, depending on their type
and scale. A DERMS handles these diverse languages and presents the information to the
DMS (or other upstream calling entity) in a cohesive way.
The optimal schedules may be allocated to the individual DER through disaggregation for actual
execution. A DERMS may directly monitor and control the individual DER or may coordinate
through shared supervisory control and data acquisition (SCADA), AMI, field area network
(FAN), or other communication-capable applications.
Like a demand response application server (DRAS), a DERMS may be a utility-operated
application or a third-party system that provides DER management services to the utility. In
either case, a DERMS is a tool for the distribution operator and a “slave” to the DMS. A
DERMS may cover the service area of the DMS, or multiple DERMS systems together may
cover the entire service area of the DMS. This latter structure means that the DMS may integrate
with multiple DERMS, which is similar to how it may be structured with microgrids.
A DER may or may not participate in the management of a DERMS, regardless of how large its
capacity, where it is located, and its ownership structure. If it does not participate in a DERMS, it
may be under direct control of the DMS using another architecture or following proprietary
operation rules, which may not follow the guideline defined in this document.
1.3 Relationships among DMS, DERMS, and Microgrid Controllers
In the integration of the DMS with microgrids and DERMS, the DMS may play the leading role,
with the others mainly occupying supporting positions, although each of the systems has its own
responsibilities, functionalities, and tasks.
The functions of an MC or control system may be implemented in a physically independent
device or a processor located in a control room or somewhere in the local area of the microgrid,
or they may be implemented as a subsystem or a subfunction of the DMS or a system in parallel
to the DMS. However, the functionality of the MC or control system should depend on relatively
independent logic, regardless of where and how it is implemented. The guidelines defined in this
document largely focus on the functional logic and common integration features that would be
applicable to various implementations as long as the microgrids follow the industry standards
such as those defined in the Institute of Electrical and Electronics Engineers (IEEE) 1547
standard [2].
Similarly, the integration of a DMS with a DERMS may be accomplished in many different
ways. A DERMS may be fully independent of the DMS and may be located in a substation, in an
engineering office, a local or remote control center, or, in the case of a third-party DERMS, in a
cloud server on the Internet. It may also be implemented as a subfunction or a dedicated
application in the DMS. However, the basic functionality of a DERMS and its integration logic
with the DMS should have similar features. This guideline will focus on the fundamental
common functionalities and integration logic between the DMS and DERMS that are generally
applicable to various implementation options.
5
In some cases, a microgrid may be managed directly by a DERMS rather than by communicating
directly to the DMS. In such cases, the microgrid may be treated in the same way as the other
DER, and all of its features and functionalities as a microgrid to DMS integration would be
omitted. Its operation should be modeled and managed as an aggregated DER rather than as a
microgrid when connected to the grid.
6
This page is intentionally left blank.
7
2 DMS – Current Status and New Challenges
DMS is regarded as one of the most critical components for the modernization of today’s
distribution system with automatic control and management. As a fully functional unit, a DMS
may have dozens of individual applications, such as fault location, isolation, and service
restoration (FLISR); VVO; and OLPF. An industry survey on DMS, as shown in Appendix B,
has been conducted to investigate the interests and current practices of different stakeholders so
that trends regarding the future development of DMS can be documented. Meanwhile, the main
technical barriers can be identified. This survey, which consists of 20 multiple choice questions,
was sent to more than 300 participants. Based on the results of the survey, a growing number of
entities have DMS running in their systems given that the available DMS products are becoming
more mature and field proven. However, participants also indicated that challenges remain in
developing a highly reliable and functional DMS in different respects (e.g., system integration,
communication). It is fair to conclude that the wide adoption of DMS means it is significantly
welcome in field applications, although there are still some technical barriers to overcome.
Considering the integration of DMS, the MC, and DERMS, which is the main topic of this
guideline, the most relevant applications in DMS can be summarized as FLISR, VVO, OLPF,
outage management, state estimation (SE), DER management, network configuration, DR, short-
circuit analysis (SCA), intelligent alarm processing (IAP), emergency load shedding (ELS), and
short-term load forecasting (STLF). The integration of the MC and DERMS with DMS should
consider the compatibility of the above functionalities. For the rest of the applications that may
be performed by a DMS, because they are not highly related to the integration of the above three
systems, they will not be addressed in detail in this guideline but discussed in the Appendices.
Most of the DMS in operation today are designed to meet the operational requirements for the
automation and management of traditional distribution grids. The key common features of the
traditional distribution grids are that they are largely passive networks that are usually configured
in a radial operation topology for distribution feeders. A typical DMS consists of or coordinates
with several subsystems and major software modules, including a SCADA system, a GIS, a Data
& Model Management (DMM) module, a set of advanced applications, and a User Interface (UI)
module. Figure 2-1 shows a high-level layout and structure of the subsystems and key
components in a typical DMS.

8
Figure 2-1 Reference Layout and Structure of a DMS
In Figure 2-1, the SCADA subsystem is responsible for acquiring real-time operational data from
distribution substations and remote intelligent electronic devices (IEDs) or remote terminal units
(RTUs) installed along the feeder lines. The SCADA system provides the “field-facing” interface
that enables the DMS to monitor the distribution field equipment in real-time (measurements
made and reported in 1 minute or less on average) or near-real-time (measurements made and
reported every 10 to 15 minutes on average). The SCADA subsystem is also responsible for
issuing control commands to the remote IEDs to operate switch devices, change voltage
regulator taps, turn on/off capacitor banks, issue set points to various device controllers, and
download configuration parameters or settings to the individual IEDs and RTUs. The GIS
provides the overall distribution grid models, including the feeder connectivity models, the
electrical parameters, and the geographical locations of the feeder line equipment and devices.
The DMM module manages the internal data and models converted from the raw network
information from the GIS and the real-time data from the SCADA system in a format that can
effectively and efficiently support the real-time operation and management of the advanced
applications and the UI. The advanced applications are the intelligence of a DMS that conducts
the analysis and optimization for decision-making either manually or automatically and proposes
or executes control actions.
An actual DMS used at a specific utility may include more or fewer components and advanced
applications. The specific integration of the individual components may also be quite different.
For instance, the interface to the GIS may be through an Enterprise Service Bus (ESB) in one
utility’s implementation but through a direct and proprietary connection in another utility’s
implementation. A similar situation exists for the SCADA interface and integration with other
components. In some cases, different interface/integration approaches may also be applied to
individual advanced applications. For example, one or more typical applications may be
provided by different vendors, and the integration may occur at the ESB or may go through a

9
dedicated proprietary interface to the DMM. Figures 2-2 and 2-3 show two sample integrations
via an ESB, and Figure 2-4 shows a sample integration through a direct/proprietary interface.
Figure 2-2 Example of Full Integration of DMS via ESB
Figure 2-3 Example of Partial Integration of DMS via ESB

10
Figure 2-4 Integration of DMS via Direct Connection
2.1 Current Status of DMS Development
The basic functionalities of a typical DMS in operation today include real-time monitoring and
control through a SCADA system and individual advanced applications, such as the following:
• Topology processor (TP);
• Intelligent alarm processing (IAP);
• On-line power flow (OLPF);
• Short-circuit analysis (SCA);
• State estimation (SE);
• Fault location, isolation, and service restoration (FLISR);
• Volt/VAR optimization (VVO);
• Optimal Network Reconfiguration (ONR);
• Switch order management (SOM);
• Emergency load shedding (ELS); and
• Short-term load forecasting (STLF).
The listed applications are the key advanced functions in a DMS and are generally designed for
controlling and managing distribution grids with passive networks. They are all facing
fundamental challenges from the high penetration of DER that make the distribution grids no
longer passive but highly active networks. The basic functionalities and features of the individual
applications will be discussed in the following subsections, and the specific impacts from the
DER penetration on the individual applications will be discussed in Subsection 2.3.3.
2.1.1 Passive and Radial Distribution Network with One-Way Power Flow
Traditionally, distribution grids are largely passive networks in which each of the feeder circuits
is supplied by a distribution substation as its sole energy source. It is generally assumed that no
other energy resources or devices are connected to the feeder circuit except passive shunt devices

11
like capacitor banks and loads of the individual end users that are modeled as pure energy
consumers, as schematically shown in Figure 2-5. There may be tie switches that connect the
feeder to a nearby feeder that can serve as a backup source; however, these tie switches are
normally open.
Figure 2-5 Schematic Diagram of a Conventional Feeder Circuit
Figure 2-5 shows that a conventional distribution grid can consist of many feeder circuits, each
one of which extends from a distribution substation all the way to the individual end users
through the feeder circuits. Power flow direction is predetermined by the configured radial
circuit topology and is not dependent on the voltage profiles along the feeder circuits.
Moreover, distribution feeder circuits are generally configured as a radial network, according to
which power flow to each end user is single sourced and delivered on a single path according to
the operational topology of the network. Such a configuration makes all issues associated with
grid planning and operation much simpler, including those having to do with distribution feeder
circuit design and planning; operation and management; and more importantly, much easier
implementation of protection, control, and voltage regulation schemes.
The one-way power flow and radial network configuration are two key characteristics of
traditional distribution systems and are fundamental to the existing DMS design, implementation,
and operation.
2.1.2 Advanced Applications in DMS
In addition to supporting subsystems such as GIS and SCADA that provide overall system
models and real-time data acquisition, respectively, a DMS also includes many advanced
applications for various functionalities. The following subsections introduce a few widely used
advanced applications in a typical DMS [3–7]:
12
2.1.2.1 Topology Processor
TP is usually a background processor that accurately determines the distribution network
topology based on the static connectivity model and the dynamic status of switch devices, and it
also displays feeder circuit colorization signifying energization status, supplying paths, and so
forth. In case a non-intentional loop is being formed, TP can detect the loop condition and issue
an alarm to alert operators. Once the topology is determined, power flow direction is as well
because of the radial configuration. The topology data are the basis of many other DMS
applications. It is also used to support IAP (Section 2.1.2.2) based on the topology structure. In
some cases, a distribution grid may have intentional looped operation scenarios. TP is
responsible for tracing the looped circuits and can make special marks to highlight them upon
operators’ requests. In general, the TP function can perform the following functions:
• Locate an element of the distribution network (e.g., transformer, section) by name or ID,
• Locate and mark supply paths of network elements,
• Determine and highlight the energization status of network elements,
• Locate and highlight network loops,
• Locate and highlight all network elements for the downstream of a selected element,
• Locate and highlight neighboring feeders of a selected feeder that can serve as an
alternate supply for the feeder,
• Color individual feeders,
• Color by voltage level,
• Color line segments with voltage magnitudes less than specified thresholds,
• Color line segments with loading greater than specified thresholds, and
• Locate and highlight portions of the distribution feeder that are isolated from the utility’s
power grid and are being energized by microgrids or DER.
In addition to requiring correct connectivity models, it is also essential to have accurate phase
information in the connectivity model for TP to provide correct topology information for the UI
displays and other advanced applications. This is because distribution networks generally operate
in unbalanced conditions, including unbalanced networks (e.g., single-phase and two-phase
laterals) and unbalanced power flow among the three phases. Incorrect phase information will
lead to topology and power flow “solutions” that are completely wrong.
2.1.2.2 Intelligent Alarm Processing
The conventional alarm mechanism has been based on the basic SCADA functions where the
data are organized with independent data points. When an event occurs in the distribution grid,
the associated data points will be used to trigger an alarm for the abnormal condition
independently, which can result in many unnecessary annoying alarm messages being presented
to the system operator. The IAP function is designed with sufficient intelligence to generate
concise and root cause alarm messages to alert the system operators about abnormal conditions
by filtering the unnecessary alarms. It includes a variety of distinct alarm priority logics that can
13
determine the manner and priority in which each alarm is announced, acknowledged, and
recorded.
The IAP function can effectively assist the operators in managing “bursts” of alarms that may
occur during an emergency or combinations of alarms related to a single event. Generally, an
IAP function should include the following functionalities and features:
• Dependent alarms for which alarming of specified points should be enabled or disabled
based on the status or values of another related data point,
• Prevention of repetitive alarms for the same alarm condition,
• Combining of related alarm messages (e.g., a single alarm message “feeder ABC tripped”)
provided instead of multiple messages that convey the same information (breaker tripped,
loss of voltage, loss of current),
• Prioritizing of alarm messages and highlighting of the most urgent messages,
• Combining of the alarm states of two or more alarms to produce a higher-priority alarm
message, and
• Suppression of alarms based on related conditions (i.e., suppressing or enabling the alarm
based on the value or state of another system variable).
The IAP function may also include “time-sensitive alarming.” It monitors and tracks time-
sensitive ratings on substation transformers, cables, and other equipment’s time-sensitive ratings.
The time-sensitive alarm function can track the amount of time that the short-term emergency
loading on a substation transformer or cable has been exceeded and alert the operator when the
time limits are being approached. For example, if a substation transformer has exceeded its
4-hour emergency rating for a user-specified period (e.g., 3.5 hours), the system operator will be
alerted.
2.1.2.3 On-line Power Flow
OLPF is a very important application in a DMS. It solves the three-phase unbalanced power flow
of the distribution network, either in a pure radial configuration or weakly meshed network with
a few loops. OLPF is one of the core applications in a DMS. Power flow results from OLPF are
used by many other DMS applications to set initial conditions and validate performance or to
show hypothetical impacts, such as in VVO, FLISR, and SOM.
The OLPF also provides the control center personnel with calculated line section current and
power flow values and node voltage values in place of actual measurements and alerts the
operators to abnormal conditions out on the feeders, such as low voltages at feeder extremities
and overloaded line sections.
In solving power flow problems, the OLPF uses the distribution system model and load estimate
provided by load allocation and estimation functions in its calculations. It may also use the
available real-time status from the substation and feeder devices and the voltages and phase
angles obtained from the EMS state estimator used by the transmission operator at the injection
points (usually placed on a high-voltage transformer bus in distribution substations). More
14
detailed OLPF results include the calculated current and voltage magnitudes and phase angles,
the real and reactive power flows and injections for the entire distribution system, and all
technical losses. All of the detailed results may be presented in various formats automatically or
on demand on convenient graphical displays for viewing power flow summaries for a large area
of the distribution system and/or viewing (on demand) the detailed results for the individual
points or sections of the distribution system.
2.1.2.4 Short-Circuit Analysis
SCA is an analysis tool in DMS that operates upon the operator’s or a user’s request. It calculates
the short-circuit current distribution for hypothetical fault types and pre-fault operation
conditions to evaluate the possible impacts of the fault on the distribution grid. SCA results can
be used to verify the relay protection settings and operation, as well as the circuit breaker and
fuse ratings, and propose more accurate relay settings or a better feeder circuit configuration
from the viewpoint of circuit protection.
The SCA function enables users to calculate the three-phase voltages and currents on the
distribution system that could occur as a result of postulated fault conditions and pre-fault
loading conditions. It can calculate and compare fault currents against switchgear current-
breaking capabilities and device fault-current limits. It may also enable users to identify
estimated fault location using measured fault magnitude, pre-fault loading, and other information
available at the time of the fault.
2.1.2.5 Fault Location, Isolation, and Service Restoration
FLISR is designed to improve distribution grid reliability. It can detect a fault on a feeder section
based on real-time telemetries from the field RTUs or IEDs installed along the feeder line, and
can quickly isolate the faulted feeder section by opening the adjacent automatic switches. FLISR
then restores services to the healthy upstream of the faulted section by the same source prior to
the fault occurring and then to the downstream sections by connecting to an alternative source. If
a single alternative source lacks sufficient capacity to pick up all healthy feeder sections that are
downstream of the faulted section, multiple alternative sources may be utilized to share the load,
depending upon their available capacities. FLISR can significantly reduce the outage time,
generally from several hours to less than a minute, considerably improving distribution system
reliability and service quality, for example, in terms of System Average Interruption Duration
Index (SAIDI) because of reduced outage duration and System Average Interruption Frequency
Index (SAIFI) because some customers can be restored to service in less time than the threshold
for permanent outages (usually 1 minute).
The main FLISR logic includes the following features:
• Automatically detects faults,
• Automatically determines the approximate location of the fault (i.e., the faulted section of
the feeder that is bounded by two or more feeder switches),
• Automatically isolates the faulted section of the feeder, and
15
• Automatically restores service to as many customers as possible in less than 1 minute
following the initial circuit breaker or recloser tripping.
The FLISR can analyze all available real-time information acquired from field devices, including
fault detector outputs, fault magnitude at various locations on the feeder, feeder segment or even
the customer meter energization status, and protective relay targets, to detect faults and other
circuit conditions for which service restoration actions are required. All control actions identified
by FLISR are executed by issuing supervisory control commands to substation circuit breakers,
reclosers, and various feeder switching devices (reclosers, load breakers, and sectionalizers that
are equipped with supervisory control capabilities).
The FLISR function is normally only responsible for dealing with permanent faults occurring out
on the main three-phase portion of the feeder and those substation faults that cause the sustained
loss of one or more feeders at the substation. Temporary faults that are cleared without sustained
loss of service by standard automatic reclosing schemes are included in FLISR logic. FLISR
function is not responsible for restoring service loss that occurs because of blown fuses on feeder
laterals, ELS activities, and manual feeder tripping.
The FLISR generally considers all possible ways to restore as much of the load as possible
without creating such undesirable conditions. The following service restoration strategies are
commonly used for service restoration by FLISR, such that it:
• Does not cause undesirable electrical conditions on any distribution feeder,
• Restores electrical service to the maximum number of customers, and
• Requires the fewest number of switching actions.
2.1.2.6 Volt/VAR Optimization
VVO adjusts the feeder voltage profile and VAR flow. It generally has the following three key
objectives and the weighted combination of them as it seeks to.
• Minimize network losses by switching the available switched capacitor banks “on” or
“off.”
• Ensure a desired voltage profile along the feeder circuit during normal and emergent
operation conditions.
• Reduce peak loads through conservation voltage reduction (CVR) by controlling
transformer tap positions in substations and voltage regulators on feeder sections.
Advanced optimization algorithms are employed to optimally coordinate the controls of
the capacitor banks, voltage regulators, and transformer tap positions.
The VVO function can operate either in closed-loop or advisory (open-loop) mode. In advisory
mode, VVO provides advisory control actions that can be reviewed and then either approved by
the dispatcher for execution or rejected. In closed-loop mode, VVO will automatically execute
the optimal control actions without operator verification. The VVO function can be executed
periodically at a user-adjustable interval, upon occurrence of a specified event (e.g., significant
16
change in the distribution system such as significant load transfer or a topology change) or when
requested by the user (on demand) manually.
In addition to the real-time data from the field IEDs, VVO may also use the near-real-time
voltage measurements from a small number of AMI meters if available. These voltage
measurements can be continuously monitored by VVO to verify that voltage constraints are not
violated at these locations.
2.1.2.7 Optimal Network Reconfiguration
ONR is designed to provide better recommendations of switch operation sequences to
reconfigure the distribution feeder circuits from the existing state to the optimal one in order to
achieve the objectives of minimizing network energy losses in operation by maintaining desired
feeder voltage profiles and balancing the loading condition among substation transformers, the
feeders, and the three phases. ONR can also be utilized to develop planned outage plans for
feeder circuit maintenance or fieldwork for service expansion. Common objectives of the ONR
function are to:
• Minimize total electrical energy losses on the selected group of feeders over a specified
time period,
• Minimize the peak demand among the selected group of feeders over a specified time
period,
• Balance the load between the substation transformers or selected groups of feeders
(i.e., transfer load from heavily loaded feeders to lightly loaded feeders), and
• Implement a weighted combination of the above.
The ONR function output is presented with a list of recommended switching actions and a
switching plan to accomplish these actions, along with a summary of the expected benefits
(e.g., amount of loss reduction).
2.1.2.8 Switch Order Management
The SOM function is to assist system operators in preparing and executing switching procedures
for various elements of the distribution system, including both substation and field devices
(outside the substation fence). It can assist the user in generating switching orders that comply
with applicable safety policies and work practices. It supports the creation, execution, display,
modification, maintenance, and printing of switching orders containing lists of actions that are
needed to perform the switching, such as opening/closing various types of switches,
implementing cuts and jumpers, blocking, grounding, and tagging. It is also able to help in
viewing a portion of the feeder being worked on in either geographic form or schematic form
that may be automatically created from the geographic view.
In addition to the computer-assisted switch order generation facility described above, the SOM
can automatically generate switching orders, with which the dispatcher can select the distribution
system device or portion of the system to be isolated and worked on. The defined switching
orders may be executed in real-time mode or in study mode. The real-time executions will
17
involve supervisory control commands, while study mode execution allows the dispatcher to
check out the switching order’s potential impact on the distribution grid, including possible
current and voltage violations, at a specified time and date using the OLPF function prior to
actual execution. SOM can alert the dispatcher if any violations are detected during study mode
execution of the switching order.
2.1.2.9 Emergency Load Shedding
The ELS function is executed in real time on request for the quick shedding of load in the
distribution system. This function is usually synchronized with the load-shedding functions that
are executed in EMS (under frequency, under voltage load shedding). The objective of ELS is to
minimize the manual effort that is required to shed a specified amount of load and restore the
previously shed load when the initiating problem is corrected. The user is allowed to initiate the
load shedding only for loads that are included in the user’s assigned Area of Responsibility
(AOR). When ELS is required, the user can activate the ELS function and enter the amount of
load to be shed. The ELS will then determine which switching devices to operate to accomplish
the load-shedding objective.
The loads that participate in the emergency load-shedding program may be assigned different
priorities corresponding to various shedding strategies. The loads at the same priority level may
be rotated dynamically for equal chance and duration of out of service.
2.1.2.10 Short-Term Load Forecasting
STLF in DMS is a function that predicts the distribution system load based on the historical load
and the historical and forecasted weather data on an hourly basis for up to a 168-hour rolling
forecast period. The STLF results should be available for viewing and outage planning and
should also be used by other DMS application functions that require an estimate of expected
peak loading in the near term, such as OLPF, FLISR, SOM, and ONR.
STLF in DMS usually provides the load forecast for the entire system or on a substation basis.
The forecast load is then allocated to individual feeders or even individual consumer
transformers based on certain allocation rules, such as using hourly or daily peaks or averages of
the feeders or consumer transformers as the allocation factors.
STLF may use both a weather-adaptive and a similar-day forecast methodology to obtain the best
accurate prediction. The forecasting model is updated based on the difference between the
previous forecast and the actual load value at the time when it becomes available. Because the
actual load consumption measured reflects the real consumption that excludes the loads out of
service and other manually manipulated portions of loads (e.g., ELS) during the hour, it is
necessary for the model updating mechanism to take into account such load adjustments. The
load forecast accuracy may be significantly enhanced in advanced DMS by incorporating actual
meter readings obtained from AMI for the specified feeder, where AMI is integrated with the
DMS.
18
2.1.3 Protection Schemes
The protection schemes used in distribution grids are less complex than those in the transmission
grids, mainly because distribution grids are generally passive networks and, more importantly,
mainly arrayed in a radial configuration. In fact, the reason why existing distribution systems
have generally been configured as radial networks is predominantly for the benefits of simple
and cost-effective protection schemes, as well as because this arrangement completely eliminates
the possibility of wheeling power flow between two substations through one or more loops
among the distribution feeders. In most cases, the distribution circuits can be well protected with
time-inverse overcurrent (OC) protection and, in some special cases, with over/undervoltage
(OV/UV) protections, as well. Moreover, because of the characteristics of one-way power flow
and the single supply path from the energy source to an end user, relay protection coordination
between an upstream device and a downstream device also becomes very easy, just by simply
setting a different time delay and/or different trigger settings. For example, an upstream OC
should have a longer pickup time than its immediate downstream OC but have the same pickup
current. This setting also allows the upstream OC to play the role of the backup protection for the
downstream OC. However, in some cases, the upstream OC may be set with a higher pickup
current, depending on the load condition between the two OCs and the short-circuit current level
at the maximum fault impedance considered for downstream OC, which can be well coordinated
based on SCA results from various hypothetical fault scenarios. There is no need to involve other
expensive or more sophisticated protection schemes, such as directional protections, differential
protections, and impedance protections, as are commonly used in the transmission grid
protections.
Figure 2-6 depicts the basic concept of feeder circuit protection coordination. When adding
microgrids into conventional distribution systems, the protection schemes become more complex
considering the two-way power flow, distributed generation (DG), and so forth. For example, the
settings of directional relays may need to be adjusted to accommodate two-way power flows.

19
Figure 2-6 Feeder Circuit Protection Coordination
2.1.4 Simplified Implementations – Expansion from SCADA System
The term DMS still lacks a unique or an industry-standard definition regarding its exact scope,
standard components, and implementations. In many cases, a DMS in a utility has been created
by combining many legacy systems or subsystems. One typical example involves expanding
from a legacy distribution SCADA system by incrementally adding more features, components,
and applications toward achieving a system with more and more DMS functionalities. It is
common in such implementations that the system lacks a good initial design and that all of the
new features or added applications resemble patches attached to the SCADA system. This
approach may reach its performance or capability limit when adding more applications and
results in a very high cost to migrate to the level of a well-designed DMS compared with the cost
of completely replacing it with a new system.
2.2 Advanced DMS
The advanced DMS not only contains the full features and advanced applications of a DMS, but
is also well integrated with other associated systems, such as the OMS, AMI, and Demand
Response Management (DRM).
2.2.1 Enterprise Integration with OMS, AMI, and DRM
Figure 2-7 depicts a high-level chart of DMS integration with OMS, AMI, and DRM through an
Enterprise Integration Bus.

20
Figure 2-7 Advanced DMS System Integration
In most utilities, an OMS is a separate system developed rather independently of the DMS and
SCADA systems. OMS is responsible for tracking outages from all available information
channels, including trouble calls, public media, real-time data from SCADA or DMS, or other
dedicated field or home devices, as well as other sources. Based on the information collected,
OMS does its best to find out the faulted areas and possible root causes and, more importantly, to
propose troubleshooting and/or restoration plans based on the best estimation of the amount of
work, resources needed, and how quickly the problem can be fixed; it also organizes and
dispatches crews to deal with the outages.
Similar to OMS, AMI has been developed independently for the purposes of energy metering
and billing to individual consumers. However, the data collected directly from consumer
consumption levels can also be useful for developing enhanced DMS functions. An AMI system
generally manages consumer energy meters directly, without modeling the distribution circuits.
Some AMI systems may include a simple model of user transformers feeding individual
consumers. The distribution system modeling in a DMS usually stops at the user transformers in
a feeder. Therefore, the user transformer is the common device through which a linkage can be
established between the distribution system model in a DMS and the energy consumption model
of the individual users in AMI.
In the meantime, DRM has received considerable attention for direct management of the
individual loads in recent years, which can be well coordinated with DMS to optimize both
normal operation and emergency load balancing for enhanced operation reliability and power
delivery quality.
2.2.2 Data Communication between DMS and OMS, AMI, and DRM
The data communication between DMS and OMS, AMI, and DRM are presented in Figures 2-8,
2-9, and 2-10, respectively.

21
Figure 2-8 Data Communication between DMS and OMS
Figure 2-9 Data Communication between DMS and AMI

22
Figure 2-10 Data Communication between DMS and DRM
As shown in Figures 2-8, 2-9, and 2-10, data communication between DMS and OMS and
between DMS and DRM can be two-way, whereas that between DMS and AMI is one-way. This
is because the data from DMS can also be useful for enhancing OMS and DRM operation,
whereas AMI, based on its original design, needs no data from DMS. However, in some special
cases, DMS may skip DR and directly use the “Remote Disconnect” feature of the AMI for ELS.
2.3 Penetration of DER
High penetration of DER introduces a series of challenges to distribution grids. The following
subsections address a few of the important issues.
2.3.1 Impacts of DER on Distribution Grid Operation
As mentioned in the previous sections, the traditional distribution grid is passive and radially
configured with one-way power flow. Because of the connections of DER along the distribution
feeder circuits, distribution networks will become active and may involve two-way power flow.
The network topology may still be radial or may be weakly meshed depending on how a utility
manages and configures its feeders—in other words, the same as what has been done before.
Therefore, the voltage profiles and power flow directions in the individual feeder circuits will not
be obviously observed from the topology and will need to be dynamically determined from real-
time measurements and/or periodic load-flow or state-estimation calculations. The static and
dynamic operational characteristics of individual DER, as well as their connection/disconnection
to/from the grid, will have direct impacts on operational reliability and power delivery quality.
All these factors introduce considerable challenges to the DMS, including the proper modeling of
23
the DER in the DMS, the impacts on advanced application functionalities and algorithms, and
issues associated with the DERMS and overall integration.
2.3.2 DER Modeling in DMS
Many different types of DER may be defined based on their energy sources and technologies,
including solar, wind, hydro, biogas, fuel cell, combined heat and power (CHP), battery storage,
and other forms of energy storage. However, DER can be categorized into two classes from an
electrical perspective: (1) inverter-based generation (e.g., PV), and (2) rotational machine-based
generation (e.g., CHPs). The energy storage technologies, regardless of whether they are inverter
based, like battery storage, or rotational machine based, like pump storage, have to be modeled
differently because they can operate in either the generation mode or load mode. Accordingly,
the proper DER models should be defined in a DMS for each different class and operation mode.
2.3.3 Impacts on DMS Advanced Applications
The connections of DER will have significant impacts on the functionalities and algorithms used
by advanced DMS applications. This is not only because the distribution grids become active
networks and power flow may become two-way, but also because the static and dynamic
characteristics of the individual DER can lead to very different conditions of overall system
operation. The following subsections discuss the issues for a few typical advanced applications
in DMS.
As mentioned, a fully functional DMS unit commonly has multiple applications. Considering the
penetration of DER, its impact on some applications should be further studied to ensure the
reliable integration of the MC, DERMS, and DMS. As stated previously, the most relevant
applications to meet the challenges of grid modernization are (1) FLISR, (2) VVO, (3) OLPF, (4)
SE, (5) DER management, (6) ONR, (7) DRM, (8) SCA, (9) IAP, (10) ELS, and (11) STLF.
The following subsections discuss the issues for the typical advanced applications in DMS.
2.3.3.1 Topology Processing
In addition to offering its own functionalities, TP is the base function in the DMS and supports
several other key applications. A few key points introduced to TP by DER connections are as
follows:
1. The status of DER and microgrids at the PCC needs to be included,
2. Network topology alone does not enable determination of flow direction,
3. The power flow or SE results need to be combined to determine the direction of power
flow of the individual feeder sections and devices, and
4. Portions of the distribution feeders that are isolated from the utility’s power grid and are
being energized by microgrids or DER need to be located and highlighted.
24
2.3.3.2 Intelligent Alarm Processing
With the connection of DER and microgrids, the logic of IAP may have to be adjusted
significantly. For example, the voltage profile will no longer be uniformly distributed along a
feeder, and a low voltage at a point does not mean all of the downstream points will also be of
low voltage as in the conventional passive network. Therefore, the old alarm-processing logic for
the dependent low-voltage profile will no longer be valid. The similar rule applies to the
overload conditions. The other situation is that the opening of a switch that would cause the
entire downstream sections to be de-energized in the passive network and the IAP could
effectively suppress all of the dependent alarms for the downstream devices. If the downstream
sections are connected with DER and/or microgrids, the switch operation may be deliberately
directing the feeder sections to the microgrids, along with the DER, for islanded operation. The
switch operation will not cause any feeder section to be de-energized but brings about a status
change only to the switch itself.
2.3.3.3 On-line Power Flow
OLPF solutions are based on specified power injections to individual buses and a slack bus with
a voltage that is constant in magnitude and phase angle, with generation being treated as positive
injections and load as negative injections. In conventional passive distribution networks, there is
no generation in the distribution circuits, and the substation source is the only energy source that
is defined as the slack bus, which is the source of the power that feeds loads and network losses.
With DER connected, however, the positive power injections to the DER connection buses have
to be specified. For single-phase DER, the injections are given to individual phases based on
their phase connections. For three-phase DER, however, it may be the three-phase total rather
than individual phases, especially for rotational machine-based generation in which power
allocations to individual phases are determined by terminal bus voltages of individual phases.
The unbalanced condition of three-phase terminal bus voltages, in turn, is not determined by the
local DER alone, but by the overall load and generation injections in the grid. On the other hand,
the distribution load-flow algorithm requires that power injections at each bus be specified for
each phase. Therefore, special generation models have to be included when dealing with the
three-phase power injections from DER.
2.3.3.4 State Estimation
DSE has been studied extensively over the last two decades but has not been widely
implemented in DMS so far. SE is essentially a data consolidation process to obtain the more
accurate values from many inaccurate and redundant data and models. SE has been very
successful in EMS for transmission networks because of the sufficient redundancy (generally
more than 1.5) of real-time measurements. Distribution systems, however, lack such redundancy
and, sometimes, even lack sufficient real-time data to perform power-flow calculations.
In recent years, with the development of the Smart Grid, distribution automation (DA) has been
greatly improved, and more and more field IEDs are being installed in feeder circuits for remote
monitoring and control. Plus, with the integration with AMI and DRM, more real-time or quasi
real-time measurements have become available, which make the application of DSE possible.
Similar to OLPF, DSE needs to include DER models to deal with power injections from the DER.
25
It has to handle the allocation of three-phase power injections if the values from individual
phases are not available.
2.3.3.5 Short-Circuit Analysis
When a fault occurs in a distribution circuit, each DER connected to the circuit will contribute
short-circuit current to the fault. SCA has to include dynamic models of the DER generators in
the calculations, especially for rotational machine-based DER. For inverter-based DER, their
short-circuit current contributions may be ignored because power electronic devices in the DER
can respond quickly to effectively limit the fault current contribution.
2.3.3.6 Fault Location, Isolation, and Service Restoration
The connection of DER may have significant impacts on the logic of fault detection and the
strategy of service restoration in FLISR. This result occurs because the fault current will take
multiple paths to all connected energy sources, rather than a single path in a conventional passive
network. After the faulted segment is determined and isolated, achieving service restoration will
not be as simple as it is for the passive feeders. It may have to account for the presence of the
associated DER in the feeder sections in addition to the de-energized loads, the reliability
requirements, the service priorities, and other constraints applied to FLISR. In general, the
connection of DER and microgrids may not cause much change to the fault isolation logic, but it
may require more advanced algorithms for effectively detecting the faulted feeder section and
providing the best effective restoration plan.
2.3.3.7 Volt/VAR Optimization
The Volt/VAR control and management in VVO will also face a few challenges from the DER
connections. The voltage profiles of a feeder circuit will not be determined only by the
transformer taps, voltage regulators, and capacitor bank status, but also by the real and reactive
power outputs from the DER and microgrids at different locations along the feeder circuits. The
VAR outputs of DER can generally be changed continuously, not like the VAR outputs from
capacitor banks that are in integers, which are either “on” or “off” with an approximately fixed
amount of VAR. Some of the DER may be schedulable by VVO, forming a mixed-integer
programming problem in VVO optimization. The real algorithm will be more complicated when
combined with other objectives and constraints, such as multi-interval, look-ahead optimization
and operation limits of the capacitor and voltage regulator operations. The VVO may have to
involve a two-stage optimization process, with the first stage dealing with the discrete control
variables (capacitor bank on and off status and the tap positions of substation transformers and
feeder voltage regulators), and the second stage dealing with the continuous control variables of
the DER and microgrid VAR generations. The two stages can go through cycles iteratively to
converge to the optimal solution.
2.3.3.8 Optimal Network Reconfiguration
There may still be significant technical and economic advantages to keeping the distribution
feeders operating in radial configuration even with the high penetration of DER. However, the
DER connections will introduce additional complexities to the ONR, because it has to account
for the generation distributions to the individual feeder sections from the DER, rather than the
load distributions alone in the conventional passive distribution networks.
26
It is well known that the ONR can use the load forecasting results to optimize the feeder
reconfiguration for the next few hours, days, or even weeks for the traditional passive
distribution networks. With the connections of DER and microgrids, it has to include the DER
forecasts and microgrid schedules for the same objective. This task is very challenging. Effective
and realistic algorithms may need to be developed to cope with the new challenges.
2.3.3.9 Switch Order Management
The SOM process will also be largely affected by the penetration of DER and microgrids where
the switch operation sequences to be developed or executed have to take into account the
associated DER and microgrids connected at the corresponding feeder sections. An improper
switch operation may cause overload or voltage violations on the other feeder sections that do
not appear to be of direct correlation to the switch operation. Therefore, it may be necessary to
study each operation with a power flow analysis for the hypothetical operation of the switch.
2.3.3.10 Emergency Load Shedding
ELS can shed load in various granular levels, for example, a substation, a feeder, or partial feeder
level. The presence of DER and microgrids will further complicate load-shedding logic,
especially for the partial feeder level. This complication occurs because feeder sections may have
both loads and DER/microgrids, and disconnecting a section will not only disconnect the loads
but also the DER and microgrid generations that will involve a series of local actions in
responding to the disconnection. It would be necessary to consider all of the consequences when
planning the ELS strategies and executing the ELS plans.
2.3.3.11 Short-Term Load Forecasting
The key feature of the STLF is its accuracy, which is dependent on the forecast model being
updated periodically based on the forecast error calculated when the actual system load becomes
available. With the connection of DER and microgrids, the total system load is not only what is
measured at the substations but also the sum of the generation from all DER and microgrid
injections. Correspondingly, the allocation methods used in the conventional passive distribution
systems for shares of the forecast to the individual feeders and loads may have to be adjusted
accordingly.
2.3.4 Impacts on the Protection Scheme
The existing protection schemes for distribution grids are generally designed on the basis of
having a single source of fault current, passive networks, one-way power flow, and radial
configuration. The DER connections will cause significant impacts on the existing schemes in
the distribution system protection. The situation will gradually become more severe when DER
penetration increases. Faster protection schemes may be needed on the electric system to clear
faults before associated voltage sags cause DER to drop off because of low-voltage ride through
(LVRT) requirements.
If the distribution system can still maintain the radial configuration with the DER penetration,
the impacts can be limited to that of the two-way power flow and the multiple paths of fault
current contribution to the faulted point. The issues mainly relate to the coordination with the
27
directional OCs, as well as the coordination of the grid protection schemes with the protection of
individual DER.
2.4 Connection of Microgrids
A microgrid, as its name implies, is considered to be a small and local area distribution power
grid with both the generation resources and the loads connected. It can operate in either islanded
mode (grid-disconnected mode) or connected mode (grid-connected mode) while being
connected to the utility distribution grid.
2.4.1 Connection Modes
In the islanded or grid-disconnected mode, a microgrid can operate independently to supply
power to its individual loads using the local energy resources. In this operation mode, the MC
needs to maintain the grid frequency and voltage profile at standard levels within the deviations
allowable by its own resources. The MC needs to ensure effective load following and voltage
regulation performance for both normal operation and emergency conditions.
When connected to the utility distribution grid, the microgrid should be able to maintain the
scheduled power transaction and participate in maintaining the voltage profile at the PCC.
2.4.2 Interface at the PCC
A PCC is the coupling point between a microgrid and the utility distribution grid. Although a
microgrid may have more than one PCC configured to it, the controls would be simpler with
only one active PCC in normal operation. A microgrid may connect to the distribution grid
through multiple active PCC, especially when the microgrid needs more support from the
distribution grid or vice versa. The microgrid may split into multiple internal islands, with each
island being connected to the distribution grid through a PCC. In such a case, the microgrid is
actually split into multiple sub-microgrids, and each one has its own active PCC.
2.4.3 Power Exchange
A microgrid may be scheduled to exchange power to/from the utility distribution grid when it is
operating in the grid-connected mode. In such situations, it is usually the microgrid’s
responsibility to maintain the target power transaction by following the schedule.
2.4.4 Mutual Support in an Emergency
Under emergency conditions, either occurring in the microgrid or the distribution grid, additional
voltage and energy support may be requested from the other party. For instance, when a
generation resource in the microgrid is shut off because of an internal fault, an emergency energy
schedule may be activated immediately to deliver more power from the utility grid through the
PCC. In some other cases, however, the utility circuit may need support from a microgrid to
provide additional power to restore service to normal, unfaulted feeder sections resulting from a
feeder fault. A microgrid may be requested to energize some of the isolated feeder sections
through a PCC, forming a wheeling path between the utility and the microgrid; that is, the
distribution grid supplies power to the microgrid through one PCC, and the microgrid supplies
power to the isolated part of the utility grid through another PCC.
28
2.4.5 Protection Scheme
As a power grid, a microgrid has its own internal protection schemes that must perform correctly
in grid-connected and islanded modes. However, when it is in the connection mode, a microgrid
becomes an integrated part of the grid as an active entity at the PCC from the distribution grid’s
point of view, and it must follow the utility’s protection rules and policies, similar to those for
individual DER. It should be able to isolate itself from the distribution grid at the PCC for either
the internal or external faults. For an internal fault, it may clear the fault as fast as possible and
recover to its normal operation before disconnecting from the distribution grid. However, it may
need to disconnect itself quickly from the distribution grid in some fault conditions that are not
effectively cleared by its local protection mechanism within the allowable time period. Once
disconnected because of a fault, it should restore its service in the disconnected mode before
requesting a reconnection to the distribution grid. For an external fault, it should follow a similar
process and, if disconnected, should maintain its operation in the disconnected mode until the
external distribution grid is ready for its reconnection.
29
3 Microgrid Operation
As briefly discussed in the previous chapter, a microgrid is a small and local distribution power
grid that can operate either in the connected mode to the utility distribution grid or as an islanded
grid while disconnected from the utility distribution grid. As a power grid, no matter how large
its size, there are some basic features and operation-related performance requirements that are
commonly shared, such as the voltage and frequency quality, load-following characteristics,
synchronization, and power exchange fluctuations when connected to the grid. A microgrid
generally has its own local distribution circuit, local loads, and energy resources that are directly
connected to its local grid. It may be implemented with multiple PCC to the distribution grid.
Under some specific topology conditions, it may form wheeling paths to the utility distribution
grid if more than one PCC is active. Some special restrictions may be needed in reconfiguring
the microgrid’s internal topology in order to avoid possible wheeling paths to the utility grid
when operating in the connected mode.
In the disconnected mode, a microgrid should be able to maintain voltage quality and frequency
and effective load-following characteristics, as well as prepare for reconnecting to the grid
through the synchronization process.
It should be noted that for the operation and management of DER or the aggregated DER, the
basic concepts and requirements can be found in the existing IEEE standards. Some of the data
shown in Sections 3 and 4 can be found in IEEE Std. 1547 [2].
3.1 Basic Concepts of Microgrid Operation
In either a grid-connected or -disconnected operation mode, a microgrid should meet specific
operation requirements, such as maintaining an acceptable voltage profile, grid frequency,
synchronization, and load following. In the grid-connected mode, a microgrid can exchange
energy with the local utility of the distribution grid following a predefined schedule between the
DMS and the microgrid in normal operation and can provide mutual support in abnormal
conditions. In the disconnected mode, the microgrid should be able to balance its internal load
demand by its own energy resources and maintain the same level of voltage quality and grid
frequency. It should also be able to reconnect to the distribution grid when requested, which
involves the resynchronization process to the grid.
3.2 Basic Requirements for a Microgrid Connecting to a Distribution Grid
3.2.1 Response to Normal Conditions
A microgrid should be able to perform proper operation functions under normal operating
conditions. The following subsections introduce some basic requirements, which are mainly
based on the IEEE 1547 standard.
3.2.1.1 Voltage Regulation
A microgrid should be able to regulate the voltage within a certain range at the active PCC as
requested by the DMS and should not cause a voltage violation at the PCC or any other point in
the distribution grid, as defined in the American National Standard Institute’s C84.1-1995,
Range A standard.
30
3.2.1.2 Coordinated Grounding with the Distribution Grid
A microgrid must have a proper grounding scheme that should be well coordinated with the
distribution grid to avoid the occurrence of any possible overvoltage or safety issues in the
microgrid or the distribution grid. Meanwhile, the grounding scheme in the microgrid may also
coordinate with the protection scheme in the distribution grid to avoid any possible interference
with the existing ground fault protection logic.
3.2.1.3 Synchronization
In the grid-connected mode, a microgrid may operate in parallel with the distribution grid
through a single active PCC or multiple PCC. For the synchronization between the microgrid and
the distribution grid at each PCC, the voltage fluctuations should be within ±5% of the prevailing
voltage level. Meanwhile, the requirements for limiting voltage flicker should also be fulfilled.
When multiple active PCC co-exist, wheeling paths among the PCC may be formed that are
more likely to remain unnoticed by the distribution grid operators. Such a situation should be
eliminated. Voltage fluctuation imposed by circulating power among PCC should also be
avoided.
3.2.1.4 Inadvertent Energization of the Distribution Grid
The microgrid must cease to energize the distribution grid at any PCC when the grid is de-
energized.
3.2.1.5 Monitoring Provisions
If the capacity of the interfacing device at each PCC is greater than 250 kVA, the monitoring of
its connection status may be performed, including the monitoring of real power output, reactive
power output, and voltage at the PCC.
3.2.1.6 Isolation Device
When required by the distribution grid, isolation devices may be equipped with the circuit
breaker at each PCC of the microgrid.
3.2.1.7 Interconnect Integrity
The microgrid should be able to withstand electromagnetic interference (EMI) environments in
accordance with the IEEE C37.90.2-1995 standard.
Meanwhile, it should also be able to withstand voltage and current surges as defined in the IEEE
C62.41.2-2002 or IEEE C37.90.1-2002 standards.
3.2.2 Response to Abnormal Conditions
Apart from the responses to normal conditions, the microgrid should perform proper operation
during abnormal conditions, as shown in the subsections below. This guidance also mainly
follows the requirements presented in the IEEE 1547 standard.

31
3.2.2.1 Distribution Grid Faults
In case of distribution grid faults, the microgrid should cease to energize the grid at any PCC.
Meanwhile, power balancing inside the microgrid should be performed.
3.2.2.2 Distribution Grid Reclosing Coordination
When a microgrid operates in the islanded mode, it may be energizing a portion of the isolated
distribution grid through a PCC. The microgrid should cease to energize the isolated portions of
the distribution grid at any PCC prior to reclosing. Power balancing inside the microgrid should
be achieved prior to reclosing, and zero power exchange should be maintained after reclosing
until it is ready to start transaction schedules.
3.2.2.3 Voltage Requirements
The voltage at the PCC of the microgrid should be monitored in case a fault occurs. If the
voltage at the PCC is within a range shown in Table 3-1, the microgrid should cease to energize
the distribution grid at the PCC. The clearing times for each of the different fault voltages are
also shown in Table 3-1. At a PCC with a capacity greater than 30 kW, the voltage set point
should be field adjustable, and the clearing time shown in Table 3-1 is the default value. If the
microgrid is disconnected from the distribution grid, the power balance inside the microgrid
should be maintained.
Table 3-1 Interconnection System Response
to Abnormal Voltages [2]
Voltage Range
(% of Base Voltage)
Clearing Time (s)
V < 50
0.16
50≤ V <88
2.00
110 < V< 120
1.00
V≥ 120
0.16
3.2.2.4 Frequency Requirements
When the system frequency falls within a range listed in Table 3-2, the microgrid should cease to
energize the distribution grid at the PCC. The clearing time for different faulted frequencies is
shown in Table 3-2. If the microgrid is disconnected from the distribution grid, the power
balance inside the microgrid must be maintained.

32
Table 3-2 Interconnection System Response to Abnormal Frequencies [2]
Capacity at PCC Frequency Range (Hz) Clearing Time (s)
≤ 30 kW
> 60.5
0.16
< 59.3
0.16
> 30 kW
> 60.5
0.16
< 59.8–57.0
(adjustable set point)
0.16 to 300
< 57.0
0.16
3.2.2.5 Reconnection to Distribution Grid
Reconnection of the microgrid can take place when the voltage is within the range of 88% to 110%
of the base voltage and the frequency is within the range of 59.3 Hz to 60.5 Hz.
The reconnection at the PCC should include an adjustable or a fixed delay (e.g., 5 minutes).
Power balance inside the microgrid should be guaranteed after reconnection during this time
period. Potential wheeling paths when multiple PCC are reconnected may be allowable.
3.3 Point of Common Coupling
Point of coupling refers to the connecting points of the microgrid to the distribution grid. For
integrating microgrids into the distribution grid, multiple PCC can co-exist. In this situation, that
is, when the microgrid is connected to the distribution grid through multiple PCC, the wheeling
paths should be noted in order to avoid circulating power.
3.4 Generation Resources and Types
Diverse types of generation resources can be deployed in a microgrid, including synchronous
machines, induction machines, and power-electronic-converter-interfaced renewable energy
sources (e.g., PV, wind turbine, and fuel cell).
Energy storage units are also commonly employed in a microgrid, if applicable. Different types
of energy storage can be used, including batteries, flywheel, and super-capacitors.
3.5 Voltage/VAR, Frequency, and Load Following
A microgrid should have sufficient capability to maintain the standard voltage profile and
frequency range, which requires that the microgrid has sufficient energy resources for both real
and reactive power generation to balance its load demands in normal operation, especially for the
disconnected operation mode in which it has no external assistance but only its own resources.
3.6 Connection to and Disconnection from the Distribution Grid
Microgrids should have the capability of connecting to and disconnecting from the distribution
grid. As stated in Section 3.2.2, microgrids should disconnect from the distribution grid when
encountering non-timely cleared faults in the distribution grid. Power balance inside the
33
microgrids should be ensured after the disconnection. Meanwhile, in the case where there are
multiple PCC, the microgrid should disconnect from the distribution grid at all PCC when the
distribution grid is in a severe fault condition, so that the microgrid can completely cease to
energize the faulted distribution grid. In case a fault occurs inside the microgrid and the local
protection mechanism fails to clear the fault within the allowable time frame, the microgrid
should also disconnect from the distribution grid at the PCC to avoid further impacts on the
distribution grid.
When the fault is clear, the microgrid can reconnect to the distribution grid. Sufficient delay time
is required to ensure the normal status of the grid. As stated in Section 3.2.2.6, this delay time
can be either adjustable or fixed (e.g., 5 minutes).
3.7 Intentional and Unintentional Disconnection
Intentional disconnection occurs when the microgrid responds to a command from the
distribution grid or requests to operate in the islanded mode. Intentional disconnection should not
induce large voltage and frequency fluctuations and should maintain power balance after
disconnection. It is common practice to ramp-down power exchanges at the PCC to near zero to
help ensure that there will be minimum impacts on both the distribution grid and the microgrid
during the transition to disconnection. Control or additional hardware devices can be deployed to
alleviate voltage and current surge during disconnection.
Unintentional disconnection occurs when unintentional islanding is detected. The MC should be
capable of detecting the unintentional islanding operation. Power balance after the disconnection
should be ensured, just as in a case with intentional islanding.
The transient process of unintentional islanding should be accomplished within 2 seconds,
according to the IEEE 1547 standard.
3.8 Internal Protection
An MC should be capable of detecting any internal fault occurring anywhere in its internal grid.
When an internal fault is detected, the faulted circuit, or the PCC, should be tripped to ensure
that the fault will not cause an operation problem to the distribution grid; at the same time, the
faulted circuit section should be isolated for the microgrid to restore service for the healthy
sections of the faulted circuit. Power balancing within the microgrid should be fulfilled after
isolating the faulted section or disconnecting from the distribution grid.
34
This page is intentionally left blank.
35
4 Distributed Energy Resources
DER connections to the distribution grid involve many challenges to both the DER and the
distribution grid. The basic concepts of DER connecting to the distribution grid are addressed in
the following subsections, including their energy sources, rotating machine or inverter-based
generation, real and reactive power outputs, voltage/VAR and frequency characteristics, impacts
on the grid voltage, harmonics, phase unbalance, fluctuations and intermittency, and low-/high-
voltage ride-through capability, as well as the overall benefits and impacts on the grid operation
reliability.
4.1 Basic DER Types
DER are the energy sources connected to a distribution grid in a dispersed manner, such as PV,
wind turbine, small hydro, and fuel cell, as well as distributed energy storage units (e.g., batteries,
flywheels, and ultra-capacitors).
4.2 Basic Requirements for DER Connecting to the Distribution Grid
The basic requirements for DER connecting to distribution grids are similar to those for
microgrids. As indicated in the IEEE 1547 standard, a single DER or aggregated group of DER
can be connected to the grid at a single PCC. From the perspective of grid connection, a
microgrid is similar to an aggregated DER, although it can be presented with either a positive (as
a generator) or negative (as a load) power injection to the grid and, hence, both DER and
microgrids follow the same rules and requirements as defined in the IEEE 1547 standard. The
basic requirements have been discussed in Section 3, and characteristics dedicated to DER will
be highlighted in this section.
For DER under normal operation conditions, the requirements regarding voltage regulations,
integration with the distribution grid, synchronization, inadvertent energization of a distribution
grid, isolation devices, and interconnection integrity should be the same as those for microgrids.
For monitoring provisions, as required by the IEEE 1547 standard, only DER at 250 kVA or
more should have provisions for monitoring their connection status, real and reactive power
outputs, and voltages at a DER connection PCC.
For abnormal operation conditions, the requirements regarding distribution grid faults, reclosing
coordination, loss of synchronization, and reconnection to the distribution grid should be the
same as those for microgrids.
For abnormal voltage conditions, if a DER is greater than 30 kW in peak capacity, the
requirements should be those shown in Table 3-1, where the clearing time is the default value,
and it should be field adjustable. If the DER is less than 30 kW in peak capacity, the
requirements should also be those shown in Table 3-1; however, the clearing time should be the
maximum value, and it should be either fixed or field adjustable. When the aggregated capacity
of grouped DER connected to a single PCC is less than or equal to 30 kW, the voltage should be
detected at either the PCC or the point of DER connection.
36
For abnormal frequency conditions, if the DER is greater than 30 kW in peak capacity, the
requirements should be the same as those shown in Table 3-2. The clearing time shown in
Table 3.2 is the default value, and it should be field adjustable. If the DER is less than 30 kW in
peak capacity, it should also follow the requirements in Table 3-2. However, the clearing time
should be the maximum value, and the frequency set-points and clearing time should be either
fixed or field adjustable.
4.3 Communication Requirements
Two-way communication capabilities may be required for effective monitoring and control of
the DER operation. Many communications and networking technologies can be used to support
these applications, including traditional twisted-copper phone lines, cable lines, fiber optic cable,
wireless cellular, satellite, power line carrier, and wireless short-range networks such as Wi-Fi
and ZigBee. Choice of the proper communication technologies for DER monitoring and control
is determined based on an analysis for a specific system’s communication requirements and
mainly depends on the type of applications, locations, and topologies of the system. When
designing communication networks for DER monitoring and control, the basic requirements
presented in the following subsections should be considered.
4.3.1 Scalability
The integration of large-scale, dispersed DER may require that communication networks be
scalable as the number of DER connected to the network increases to meet the needs of various
applications. The architecture of the network should be designed to cope with this challenge. In
general, a hierarchical network architecture is desirable because of its flexibility and
expandability in incorporating new types of data and applications. This network design can
enable “near-user” data processing and distributed control, which significantly reduces the
communication and computation burden at the control center or data center for DER integration.
4.3.2 Bandwidth
The bandwidth requirements for a communication network refer to data traffic speed, that is,
how many data packets per second are needed, and the data traffic pattern, that is, the periodicity
or burst (event-based) for each application. The U.S. Department of Energy (DOE) guidance on
bandwidth requirements for DER monitoring and control is 9.6 kbps to 56 kbps [8]. This defines
an acceptable range, which an actual design should consider based on its specific application
needs, requirements, and constraints for DER integration.
4.3.3 Quality of Service
Because of various aspects of DER connections (e.g., protection, monitoring and control, energy
management, and post-event analysis), the quality of service (QoS) requirements may differ in
terms of data quality and communication latency. The DOE guide provides a communication
latency range required by DER connections between 20 ms and 15 s [8]. The data quality
(accuracy) can be increased by utilizing error correction and acknowledgement feedback
mechanisms for data transmission. The communication latency can be lowered by increasing the
transmission priority. The communication protocols should have mechanisms to adjust the
37
accuracy and latency of data transmission to accommodate the various QoS requirements for
DER connections.
4.3.4 Data Quantity and Storage
The quantity of data flow varies among different applications, and thus data storage (buffer) in
communication networks should be properly designed to account for data flow requirements. For
example, in protection and control, the quantity of data transmitted is usually very low for a fast
response, so little data storage is needed. On the other hand, for forecasting or post-event
analysis, a large volume of data may be required and thus sufficient data storage is needed.
4.3.5 Data Content
When designing the data packet of the communication protocol, the fields of each packet
corresponding to the specific measurements or control signals should be well defined. The data
contents depend on the inputs/outputs of the various DER applications.
4.3.6 Cybersecurity
Cybersecurity is essential in communication network design for DER connections, since high
penetration of DER would have significant impacts on the distribution grid operation. As a result,
a cyber-attack on DER communication networks can result in severe consequences to power grid
operation. According to the DOE’s guide [8], the cybersecurity requirements for DER
communications should generally be high. The general technical security requirements for
information technology (IT) should be tailored to the unique features of the DER connections.
The general cybersecurity requirements for a Smart Grid can be found in [9], and a detailed
mapping of cybersecurity requirements tailored for DER connections can be found in [10].
4.3.7 Interoperability
The communication protocols for DER should also comply with the existing standards for
distribution systems, including Modbus, SEP2, DNP3, and International Electrotechnical
Commission (IEC) 61850. Special attention should be paid to Part 90-7 of IEC 61850, which
describes the information model for inverter-based DER in the communication networks [11].
The design of the communication protocols should be interoperable with these widely accepted
standards.
4.4 Volt/VAR Characteristics
Each DER should be configured with specific voltage and VAR characteristics, as shown in
Figure 4-1 [12].

38
Figure 4-1 Voltage/VAR Characteristics of a DER
As shown in Figure 4-1, a DER can maintain its normal and constant VAR output within the
normal voltage range and will increase or decrease if the voltage drops or increases, respectively.
Once it reaches its reactive power capacity limit, the VAR output will remain constant even
though the voltage drops or increases further.
4.5 Real and Reactive Power Characteristics and Control
The real and reactive power capacities of a DER are generally not constant values, but depend on
its operation conditions and the relative values between these capacities. Figure 4-2 depicts the
operation range of a DER’s real and reactive capacities [12]:
At a normal voltage level, the apparent power capacity of a DER is constant; when the kVAR
output increases, the kW capacity will be reduced accordingly. The set points for the voltage
control, VAR control, and real power control should be within the capacity range, each of which
depends on the other.
4.6 Fluctuation and Intermittency
Because of the natural characteristics of distributed energy resources, the power output of a DER
may not be able to remain constant at all times. For example, a PV-based DER may have a
significant drop in power output, with sudden cloud coverage changes at the PV site. A similar
situation can occur with wind-based DER when the wind speed varies significantly in a short
period of time. A large DER may require special measures to avoid very short-term fluctuations
and intermittency (e.g., by installing energy storage devices to smooth out the fluctuations).
However, small-sized DER may not have mechanisms to address such fluctuations. It is the
distribution grid’s responsibility to be robust enough to handle the intermittency and deliver
quality electric energy to the end consumers.

39
Figure 4-2 kW and kVAR Operation Range of a DER
4.7 Harmonics
When a DER serves balanced linear loads, the harmonic currents injected into the distribution
grid should not exceed the values shown in Table 4-1. Any harmonic current induced by
harmonic voltage distortions present in the distribution grid without DER connections should be
fully excluded.
Table 4-1 Maximum Harmonic Current Distortion in Percentage of the Fundamental
Current [2]
Individual
Harmonic
Order h (odd
harmonics)
h < 11 11 ≤ h < 17 17 ≤ h < 23 23 ≤ h < 35 35 ≤ h
Total
Demand
Distortion
(TDD)
Percent (%)
4.0
2.0
1.5
0.6
0.3
5.0
40
Note that the current should be one of the following values, whichever is greater:
• Maximum load current integrated demand (15 or 30 minutes) in the distribution grid
without DER units, or
• Rated current capacity of the DER unit.
Even harmonics are limited to 25% of the odd harmonic limits shown in Table 4-1.
41
5 Distributed Energy Resources Management System
DERMS is a relatively a new concept to the distribution industry. Its key objectives and
functionalities mainly consist of effectively organizing, managing, optimizing, and controlling
DER resources for maximum grid economic benefits, enhanced grid operation reliability, and
service quality. This functionality includes how the DER are aggregated or grouped, for example,
at the substation level, feeder level, or even at the feeder section level, as well as in other ways,
such as by generation types, capacities, response rates, or other characteristics. The aggregated
groups may be modeled as virtual generation units (VGUs), which can be optimally scheduled
with targeted operation schedules hourly or by a fraction of hourly intervals for hours one day
ahead. The resultant VGU schedules can be further distributed to the individual physical DER
through disaggregation as their operation base points for the DER operating in real time.
5.1 Objectives and Functionalities
DERMS should effectively manage, optimize, and control the DER dispersed along the
distribution feeder circuits in order to maximize the economic benefits of DER, enhance grid
operation reliability, improve power supply quality, and minimize possible negative impacts (if
any).
5.2 Group Structures and Aggregation Policies
The group structures and aggregation policies are the core features of DERMS. DER can be
physically dispersed anywhere on the distribution grid. They also have very diversified
characteristics, for example, in terms of energy sources (solar, wind, biogas, hydro, fuel cell, and
battery storage), generation types (inverter-based or rotational machine-based), physical
locations in the feeder circuits or feeder sections, power capacities, dynamic response
performance to voltage and frequency changes, controls (local or remote), connection status, and
many other features. It may be necessary for the DERMS to organize or group them properly in
different aspects based on their features or specific characteristics to manage and optimize the
resources effectively. Therefore, a single DER can be a member of several featured groups; for
example, a remotely controllable solar DER can be a member of the solar group, a member of
the remote control group, and a member of the fast-response group for a specific feeder circuit or
section where the DER is connected. The grouped DER based on their specific characteristics or
features may be organized as VGUs that can be the main base unit to participate in the optimal
resource scheduling in the DERMS. The optimized operation schedules for the individual groups
may be disaggregated to the individual physical DER as the set points to guide their operation
around the committed schedules.
5.3 Operation Rules and Resource Optimization
A DERMS may need to consider the network constraints of distribution grid operation while
optimizing the DER operation schedules based on their energy availabilities and the demands at
different levels (e.g., substation, feeder, and feeder sections). It should communicate with the
DMS to obtain the real-time operation condition and the committed operation plans to define the
network constraints. Before committing to a schedule, it may be necessary for the DMS to verify
that such a schedule will not cause any issue to the overall grid operation reliability and service
quality. The DMS, in turn, may accept or reject the schedule, or counter offer a better schedule
42
for the DERMS to review or consider. Once a schedule is accepted, it becomes a committed
schedule, and both systems have to follow it closely. Under emergency conditions, temporary
schedules may be provided, or the DMS may take emergency actions by shedding loads and/or
the generation of some DER.
5.4 Controls and Monitoring of Individual DER
A DERMS may directly monitor the operations of the individual DERs remotely, or go through
the DMS system and indirectly collect the operation data. It may also directly issue controls to
the individual DER to download the set point values to the DER under remote control with the
real power (kW) and reactive power (kVAR) generations or the voltage and real power (kW)
settings based on the committed operation schedules. For those DER not under remote
monitoring and control, DERMS may estimate their generation profiles based on their historical
patterns and weather forecasts, or use the near-real-time data from AMI or other systems
integrated with DERMS.
5.5 Generation Forecasting of DER
The optimization in scheduling an individual DER would be based on the available energy
resources. However, a big portion of the DER may be from renewable energy sources, such as
wind and solar, which are highly weather-condition-dependent and cannot be fully dispatchable
to meet the demands. Therefore, it is necessary to have a good forecast of the available
generation for the individual DER based on the weather forecast and other conditions. The
generation forecast can either be an independent module to provide the forecasts to DERMS or
be part of DERMS as an application.
5.6 Impacts of DERMS on DMS
The installation of a DERMS may help DMS operation. It may significantly reduce the
uncertainties caused by the dispersed DER that may not follow a unified or coordinated
operation pattern. With a DERMS, the DMS can obtain not only the real-time generation values
of grouped VGUs, but also their operation schedules for look-ahead time intervals. This
capability can be very effective in enabling the DMS to make predictive operation, control, and
management decisions to further enhance operation reliability.
43
6 DMS Integration with Microgrids
Microgrids can operate in either a grid-connected or a grid-disconnected (islanded) mode. The
integration of DMS and MCs needs to ensure that both the distribution grid and the microgrids
are maintaining reliable operation for normal operation and contingency conditions, as well as
making seamless transition from one mode to the other.
A microgrid may be independently owned by a customer, an energy provider, or the distribution
utility that runs the distribution grid. The MC or control system can be physically located either
locally or remotely, or even virtually in a cloud server on the Internet, regardless of its ownership.
It may also be implemented as a subfunction or an advanced application in the DMS. This case
would most likely occur when the microgrid is owned by the same utility that runs the
distribution grid.
Regardless of the ownership structures and the controller locations, and how they are actually
integrated with the DMS, the integration of microgrids with the DMS should follow common
principles and rules as long as they respect the common definition of microgrids and the
operation principles. The following subsections focus on the common principles and features in
the integration.
6.1 Data Communication between the DMS and Microgrid
When connected to the distribution grid, a microgrid should have the necessary data
communication for operation coordination under both normal operation and emergency
conditions.
Under normal operation, the DMS needs to receive information on the energy interchange and
voltage/VAR support schedules between the microgrid and the distribution grid at the PCC. In
addition, it needs to receive real-time data in terms of phase voltages, currents, kWs, and kVARs
at the active PCC. The microgrid may also provide a simplified internal operation topology to the
DMS to indicate whether it forms wheeling paths to the distribution grid in case there is more
than one PCC in active status. The wheeling paths may generate hidden loops to the distribution
grid, which can cause considerable operation difficulties for the DMS and the distribution grid
while system operators would remain unaware or lack acknowledgment. Figure 6-1 depicts a
wheeling path in a microgrid.
Figure 6-1 shows that when the microgrid has both of the PCCs (PCC-1 and PCC-2) activated
and its internal tie switch (S-1) closed, a hidden loop is formed to the distribution feeder that the
DMS will not be aware of because it does not have the internal operation topology of the
microgrid.
The situation could be even worse if the DMS were to transfer some loads from one feeder to
another, as shown in Figure 6-2.

44
Figure 6-1 Wheeling Path in a Microgrid – Inner-Feeder Loops
Figure 6-2 Wheeling Path in a Microgrid – Inter-Feeder Loop
45
Such hidden loops could cause significant operational difficulties or even catastrophic
consequences in DMS control and management.
Under emergency conditions, either initiated from a microgrid or from the distribution grid in the
grid-connected mode, support may be needed from the other party, including emergency energy
interchange and voltage/VAR support. The request for emergency support should be forwarded
to the other party and be confirmed quickly for effectively relieving the emergency problems.
Under severe fault conditions, either occurring in the distribution grid or the microgrid, the PCC
should be disconnected by the relay protections. This type of disconnection is classified as
unintentional disconnection.
For unintentional disconnection, regardless of the root causes, both the DMS and the MC should
take quick actions first, such as FLISR or other emergency measures, to isolate the problem at
the troubled side, followed by recovering actions to restore load balancing and voltage profile
recovery (e.g., increase real and reactive power generation in the microgrid, shed load or increase
local DER generation, and activate the VVO to re-optimize the voltage profile in the DMS of the
distribution grid).
For intentional disconnection, either by the MC or the DMS, depending upon which one requests
the disconnection, the other party should be notified to prepare for the disconnection, including
reducing the energy interchange to be near zero at the PCC and re-optimizing the grid voltage
profiles. These steps can be done by balancing the real and reactive demands in their respective
grids.
For reconnection to the grid, the microgrid should notify the DMS, and it sometimes may need to
receive a confirmation notice before starting the reconnection process. Once confirmation is
received, the microgrid can start the resynchronization process, which requires that (1) the grid
frequency and voltage level closely match the distribution grid values across the PCC, and
(2) the voltage angle difference between the two grids at the PCC is near zero. Once connected
and stabilized, the energy exchange and mutual support functions can be activated.
Figure 6-3 is a summary of data communication and function mapping between an MC and a
DMS to highlight the different functions of each under both normal and fault conditions. As
shown in Figure 6-3, in both operation modes, the functions in the MC and DMS are coordinated
with each other to ensure effective integration between the two control systems.

46
Normal Condition
• Real-time data at the PCC, e.g., voltage,
current, active and reactive power, etc.
• Simplified Microgrid internal topology to
indicate the potential wheeling paths
Fault Condition
• Emergency support to the distribution grid
when necessary
• Disconnection under severe fault condition
in the distribution grid if it is not cleared by
the distribution grid protection within the
predefined time period of the Microgrid
reaction to a grid fault
• Severe fault is either not detected or not
cleared by the Microgrid protection within
the predefined time period of the grid
reaction to a Microgrid fault.
• Unintentional islanding: load balancing and
voltage profile recovery
• Intentional islanding: notify DMS to prepare
for the disconnection; balance the active and
reactive demand in the Microgrid
• Reconnection: notify DMS for the
reconnection
Normal Condition
• Real-time data at the PCC, e.g., voltage,
current, active and reactive power, etc.
• Be aware of the potential wheeling path in
the Microgrid
Fault Condition
• Emergency support to the Microgrid when
necessary
• Severe fault is either not detected or not
cleared by the grid protection within the
predefined time period of the Microgrid
reaction to a grid fault.
• Disconnection under severe fault condition
in the Microgrid if it is not cleared by the
Microgrid within the predefined time period
of the grid reaction to a Microgrid fault
• Unintentional islanding: load shedding or
local DER generation increase, VVO to re-
optimize the voltage profile
• Intentional islanding: prepare for the
disconnection when receiving the request
from the Microgrid; balance the active and
reactive demand in the distribution grid
• Reconnection: prepare for the microgrid
reconnection and start the normal operation
when the reconnection is terminated
Microgrid Controller DMS
Figure 6-3 Data Communication and Function Mapping
between a Microgrid Controller and a DMS
Considering the data communication and interactive control functions between an MC and a
DMS, the microgrid can be seamlessly integrated and treated as an energy asset to improve the
operation of distribution grids. The control signals are generated by different advanced
applications in DMS to change the status of the microgrid according to the operation condition
and requirements, as shown in Figure 6-4.

47
• Fault Location, Isolation, and
Service Restoration
• Intelligent Alarm Processing
• Optimal Network Reconfiguration
(during and after service restoration)
• Emergency Load Shedding
• Volt/VAR Optimization
• On-line Power Flow
• Optimal Network Reconfiguration
• DER Management
• Demand Response Management
• Electric Vehicle Charging
Islanding
Grid-
Connected
• Voltage regulation at the PCC
• Interchange active and reactive
power control
Fault Condition
Normal Condition
Fault Condition Normal Condition
DMS
Microgrid
Controller
Control Signal
Figure 6-4 Control Signals Generated by the Advanced Applications
to Adjust the Operation of the Microgrid
6.2 Operation Rules for Both the DMS and the Microgrid
A microgrid is generally an independent entity having its own operation rules and regulations.
However, when connected to the distribution grid, it should also follow the operation rules of the
distribution grid at the PCC, including those of the DMS responsible for the control and
management of the distribution grid. Although the DMS may not be granted the control access to
penetrate into the internal operation of a microgrid, it should enforce rules such that the
microgrid cannot cause operational difficulties for the distribution grid owing to its own internal
improper topology configuration, circuit faults, voltage control, or load-following problems. For
instance, the DMS may request internal circuit topology from a microgrid that has more than one
active PCC to the distribution grid, from which the DMS can detect whether the microgrid is
forming a wheeling path or a parallel loop to the distribution grid, as shown in Figure 6-5.

48
Figure 6-5 Simplified Microgrid Topology in DMS
As Figure 6-5 makes evident, with the simplified topology, system operators can easily
determine what impact the microgrid has on the overall operation topology of the DMS when the
microgrid has multiple PCCs activated.
The microgrid should disconnect from the grid if any fault or event occurs internally that will
jeopardize the operation of the distribution grid. If a fault occurs in the distribution grid, the
protection schemes in the DMS will be activated, but the related microgrids are also responsible
for protecting themselves from any harm the fault may cause. Microgrids in the grid-connected
mode should disconnect from the grid if a fault causes the corresponding distribution circuit to
trip and become de-energized. The microgrids should also have the capability to ride through
certain levels of low voltage owing to temporary fault conditions, as defined in the standards
(e.g., the IEEE 1547 standard) during a fault time period that does not cause the circuit trip.
The microgrid should contribute to maintaining the healthy voltage profiles of the distribution
grid at the active PCC when connected to the grid.
6.3 Synchronization and Connection/Disconnection
When a microgrid is to connect to the distribution grid, it should go through the synchronization
process (that may be automatically checked by the synchronization relay) to ensure that its
voltage level, frequency, and phase angle across the reclosing switch meet the synchronization
criteria before closing the connection switch. No voltage or power disturbances to the
distribution grid may be tolerated during the synchronization process. In other words, the
49
synchronization process should be aborted if any severe disturbance occurs during the process.
Upon the completion of the synchronization process, the energy exchange may be ramped to the
committed target at a predefined ramping rate.
For intentional disconnections, the microgrid may ramp the energy exchange at the active PCC
to near zero before disconnecting from the grid, regardless of which party initiated the
disconnection.
For unintentional disconnections, both the distribution grid and the microgrids may need to have
sufficient resources and proper control strategies in place to absorb the impacts and quickly
recover to normal operation by complying with the operation standards, such as the
corresponding sections defined in the IEEE 1547 standard.
6.4 Microgrid Control while Integrated with DMS
A microgrid’s local energy resources and load management should have sufficient monitoring
and control capabilities to do the following: (1) maintain the synchronization with the
distribution grid, (2) maintain the desirable voltage profile at the PCC and its internal grid, and
(3) quickly respond to the changes in internal load and generation and the disturbances from the
distribution grid or the internal grid. Its operation conditions at the PCC should be monitored or
visible to the DMS of the distribution grid. The connection switch at the PCC may also be
controllable by the DMS for emergent disconnection.
6.4.1 Frequency Control and Load Following
A microgrid is generally not powerful enough to influence the frequency of the distribution grid
significantly; however, it should maintain synchronization at the PCC with constant power
exchange by following the committed transaction schedules with minimum deviation and
minimum accumulated inadvertent energy exchange. The DMS should closely monitor the
voltage profiles and power fluctuations at the PCC in real-time operation. The microgrid should
be able to respond quickly to its internal load and generation changes or disturbances so there
will be minimum impacts on the distribution grid at the PCC. In case of significant generation
shortage or surplus, a new power exchange between the distribution grid and the microgrid
should be scheduled, or the action of load or generation shedding may be launched in order to
maintain the load balancing.
6.4.2 Volt/VAR Control
The DMS of the distribution grid should maintain healthy voltage profiles for the feeder circuits
where one or more microgrids may be connected. In addition, a microgrid is responsible for
assisting the DMS in maintaining the desirable voltage at the PCC. The microgrids may offer
their additional reactive capacities and resources to the DMS for the overall voltage/VAR
optimization of the distribution grid. The DMS can also provide or recommend the optimal
voltage or VAR settings for the individual PCC of each microgrid.
The conventional VVC algorithms in the DMS are designed for controlling the on/off states of
the capacitor banks at the feeder circuits and distribution substations, the substation transformer
tap positions, and the voltage regulator taps at the feeder circuits, all in binary or discrete
50
quantities. With the microgrid and DER connections, the reactive power and voltage controls
may be continuously adjustable quantities within certain ranges. This arrangement will introduce
new challenges to the VVC algorithms because they have to handle mixed control variables,
some in binary and others in continuous (adjustable) quantities.
6.4.3 Emergency Support
Under emergency conditions, regardless of where the emergency starts, the DMS and microgrids
should be able to support each other with only minimum negative impacts felt by either party.
An emergency support policy may be established between the two parties, including emergency
voltage/VAR and real power supplies from one to the other with specific levels and conditions.
6.5 Resource Optimization in Microgrid
The energy resource optimization of a microgrid is actually the internal issue of the microgrid
and does not have much to do with the DMS of the distribution grid. However, the DMS may
define constraints on the microgrid at the PCC (e.g., the operation ranges of the voltage, VAR,
and the allowable real power exchange at the individual PCC for different time periods). The
individual microgrids may optimize their resources by taking into account all of the constraints
to maximize their overall benefits, including taking advantages of peak/off-peak energy price
differences of the distribution grid so they can use their internal energy resources and storage
capacities intelligently.
6.6 Energy Transactions and Wheeling between the Distribution Grid and
Microgrid
Power exchanges, or energy transactions, between the distribution grid and a microgrid should
be fully monitored by both the DMS and the microgrid and be directly controlled by the
microgrid to follow the committed transaction schedules.
The energy transactions between the distribution grid and a microgrid are counted as net
quantities from any active PCC of the microgrid. When more than one active PCC is involved,
energy wheeling will be more likely to occur. An example of this occurrence is when one party
delivers a certain amount of power to another through one PCC and receives some amount of
power from another PCC. Operators may need to avoid such wheeling in normal operation,
although it may be needed in emergency support and therefore must be well coordinated between
the two parties.
A wheeling path through a microgrid will form a looped operation condition for both the
distribution grid and the microgrid, which may result in operation difficulties if the grids are
configured to operate in radial configuration, including impacts on the protection mechanism,
voltage and VAR control, and the load flow distribution.
However, under emergency conditions, such wheeling can be useful in providing alternative
paths to deliver power to consumers and helpful in maintaining voltage profiles for the grid.
When microgrids are owned by the utility that owns/operates the distribution grid, the microgrid
control systems may be embedded into the DMS as subfunctions or applications. This structure
51
permits the scheduling of energy exchanges to be optimized in the same domain as the entire
distribution grid. In this case, there may be no need for independent optimization of individual
microgrids.
6.7 DMS Function Enhancement with Microgrid Integration
A microgrid can be considered as an energy resource just as a DER. Under some circumstances,
it can be considered as a controllable load to the distribution grid. Therefore, it should be
properly modeled in the DMS as a special entity with variable generation and load capacities.
Microgrid connections can be very helpful in further enhancing the operation reliability and
power supply quality of the distribution grid by optimally utilizing their potentials. The
corresponding operation strategies in DMS may be adjusted to meet the operation rules and the
natural characteristics of microgrids, including those for power transactions, voltage/VAR
optimization, emergency support, etc., as discussed in Sections 6.4.1 through 6.4.3.
6.8 Protection Schemes
Similar to instances of DER penetration, microgrid connections will result in two-way power
flows on the distribution grid. The protection scheme in the distribution grid should be adjusted
accordingly to cover the multisource contributions of short-circuit currents from different
directions to the point of faulting. It is a minimum requirement for the distribution grid to
implement a directional over-current protection scheme, which can support different short-circuit
current settings for different fault directions. It is important to note that the protection scheme
must be defined in the planning stage. With increasing DER penetration, operators are required
to modify the protection scheme accordingly to ensure the successful integration of the MC and
the DERMS into DMS.
The distribution grid will generally be an active network with the connections of DER and
microgrids. These local generation resources will introduce significant dynamic changes,
conventional static protection schemes, and settings that sometimes may not cover all possible
scenarios. For this reason, modifications should be made during operations to mitigate the impact
of DER. For example, some of the DER may be on and off occasionally, and the rest of the
DERs in connection may or may not be significant short-circuit current sources, depending upon
their energy conversion types (inverter-based DER may not be significant fault current
contributors). Moreover, the operation topology of the distribution grid may also be dynamically
adjusted or reconfigured owing to changes in dynamic operation conditions. The protection
schemes and settings should be adjusted accordingly so as to adapt closely to operation condition
changes. These settings will not only require more reliable remote relay-setting mechanisms but
also higher cybersecurity requirements for the protection schemes.
In addition, it may also be necessary to strengthen the original protection mechanisms at the PCC
to isolate the faults occurring in the internal circuit of a microgrid and keep them from resulting
in severe impacts on the distribution grid.
Another modification of the existing protection scheme is the synchronization at the PCC. A
microgrid should implement a synchronization scheme at the PCC for connecting to the
distribution grid, in addition to the protection schemes isolating the faults occurring at the grid
52
side or at the internal circuit. The synchronization logic should automatically control the
corresponding energy resources to adjust the microgrid frequency and voltage to levels matching
that of the distribution grid at the PCC. The synchronization relay can lead to reconnection to the
grid by automatically checking the differences in voltage, frequency, and phase angle across the
connection switch at the PCC.
6.9 Responsibilities of Microgrids and DMS in Integrated Operation
6.9.1 Responsibilities of Microgrids
An MC is responsible for maintaining constant real and reactive power exchanges and healthy
voltage profiles at the active PCC when connected to the distribution grid. It may provide a
simplified operation topology to the DMS when more than one PCC is activated. A microgrid
should be able to disconnect automatically from the distribution grid under any severe
distribution grid fault condition, beyond the threshold of fault-ride-through, occurring either
within the distribution grid or the microgrid.
6.9.2 Responsibilities of DMS
The DMS should provide operation guidance to the microgrids, including the operating voltage
ranges and power exchange fluctuation tolerances around the scheduled targets at the active PCC.
The DMS can also initiate emergency requests to microgrids with clearly defined and specific
emergency support requirements, including for support through wheeling if there is more than
one active PCC.
53
7 DMS Integration with the DERMS
The DERMS is responsible for organizing, managing, and controlling the dispersed DER in a
distribution system that could be directly managed and controlled under a DMS. Therefore, it
should be properly integrated with the DMS to perform its functions by mutually sharing the
available data in both systems, which sets the fundamental basis for both systems to work in a
coordinated way in controlling and managing the corresponding parts of the distribution system.
Similar to the microgrids, a DER may be owned by an independent customer, an independent
energy provider, or the same distribution utility that runs the distribution grid. In addition, the
DERMS may be located in a local area, in a substation, in the control center, or even on a cloud
server. It may also be implemented as a subfunction or application embedded in the DMS.
Moreover, the distribution grid may have more than one DERMS, each one managing a portion
of the DER in part of the distribution grid. These differences may lead to variations in the actual
implementation of the integration but should not lead to different principles and rules as long as
they respect the common definition and operation objectives of the DERMS. The following
sections focus on the common principles and features of the DERMS integration with the DMS.
7.1 Data Communication between the DMS and the DERMS
7.1.1 Model Sharing
Generally, the DMS will have a fairly detailed model of the entire distribution system, usually
with full coverage from the distribution substations all the way to the end user transformers. The
model may also cover the DER, but it may not cover their characteristics in full detail, including
only basic features like the capacities, operation limits, etc., and more likely in terms of the
aggregated VGUs at the user transformer level.
In addition to the detailed parameters of the individual DER, the DERMS can also have a model
of the distribution network defining where the DER are connected (e.g., through the user
transformers at the PCC). Figure 7-1 shows a typical connection of DER at an end-user
transformer in a feeder circuit. The individual DER in one nearby location may share one user
transformer or may be aggregated as one or more VGUs based on their specific characteristics
and grouping rules.

54
Figure 7-1 A Typical Connection of DER at a Feeder and User Transformers
Once the physical connection to the distribution circuit or feeder is defined, it may not be
necessary for the DERMS to include a full distribution network model that is the same as what
the DMS uses; rather, it can include a simplified hierarchy of the distribution grid organization
defining the specific feeder section, feeder circuit, and substation where each of the DER is
connected or belongs, as shown in Figure 7-2.
Figure 7-2 An Organizational Hierarchy of Individual DER

55
The organization hierarchy is a dynamic structure that may change as the distribution topology
changes owing to switch operations and network reconfiguration for load transferring, load
balancing, planned outage services, service restoration, or periodic network reconfigurations.
However, a feeder section can be modeled as the basic topology component, and any topology
change can be easily adapted by reassigning the corresponding feeder sections to the new target
feeders, or, in some cases, the entire feeder circuit may be assigned to another target substation.
7.1.2 Operation Data Communication
The DERMS may take into account the dynamic changes of distribution network topology in its
operation model while organizing its dynamic DER groups and optimizing the operation
schedules of the groups. The resultant schedules of DER groups or VGUs are then disaggregated
to the actual individual DER as their base operation settings. The schedules of DER groups or
VGUs should be forwarded to the DMS in either whole-group quantities or break-down
quantities by smaller groups, depending on how the DER are modeled in the DMS. The
operation data exchanges between the DERMS and DMS in the integrated environment can be
presented as shown in Figure 7-3.
Figure 7-3 Data Communication between the DMS and DERMS
The data exchange may be back and forth for a few iterations in real-time operation for
reviewing, validating, and rejecting or revising before the operation schedule is finalized,
accepted, and committed. The committed schedules can also be revised, suspended, or cancelled
when the operation condition changes; and emergent schedules may be developed and applied
under emergency conditions.
56
The DERMS may directly monitor and control individual DER or forward the set points and
target operation schedules of the individual DER to the DMS for actual execution in case the
DER are under direct control of the DMS. In either case, the DMS should also monitor the
operation of the aggregated DER, which is similar to what the DERMS does. It would be
recommended that both the DERMS and the DMS may share available real-time measurements
from the DER, regardless of which system directly collects and owns the data.
7.2 Responsibilities of the DERMS for DMS
The DERMS is the system that is responsible for performing the overall management and control
of the individual DER, including grouping the DER based on their energy sources, maximum
and available real and reactive capacities, availability in timeframes, dynamic response
performance, voltage-VAR and frequency characteristics, and physical locations in the
distribution circuits, etc. The individual DER may be organized in small groups as VGUs based
on their electricity distance and operation characteristics in the optimization and scheduling
process. However, the DMS may not need to receive detailed information about the DER for its
operation objectives. It is the DERMS’s responsibility to simplify and aggregate the resultant
information at the level that the DMS needs for integrated operation. For instance, the DMS may
be interested only in information at the aggregated VGU level in performing the DMS control
and management functions.
The DERMS should provide tentative operation schedules of the DER or VGUs for the DMS to
evaluate or validate in advance. The DERMS is also responsible for quickly responding to any
emergency request from the DMS for emergency operation schedules for certain DER when the
DMS encounters emergency conditions and looks for external supports (e.g., increasing
generation, providing more kVARs from some DER, or shedding some generation).
The DERMS may also include a generation forecasting function for the various types of DER.
7.3 Responsibilities of the DMS for the DERMS
In addition to providing the real-time operation condition of the distribution grid, the committed
operation schedule, the associated constraints, and the available margins for the DERMS’s
optimization, the DMS may also validate the tentative operation schedules of the DER and
provide feedback to indicate the acceptance, rejection, or revision of a suggested schedule. It
should also initiate emergency requests to the DERMS with clearly defined and specific
demands for support.
7.4 Operation of DER under the DERMS Connecting to the Distribution Grid
The aggregated DER groups can be modeled as VGUs, which may be optimally scheduled with
target operation schedules on an hourly or subhourly basis for a day or a few hours ahead. The
resultant VGU schedules can be further distributed to the individual DER as their operation base
points that may be directly downloaded to the individual DER through the remote controls or
command messages, depending upon what levels of remote monitoring and control capabilities
are implemented on the DER.
57
Prior to finalizing the operation schedules to the VGUs or individual DER, it may be necessary
for the DERMS to obtain a validation or approval status from the DMS as to the tentative
schedule. The DMS may approve, disapprove, or revise the proposed schedule based on the
actual grid condition. On the other hand, the DMS may request an urgent change in a committed
operation schedule to the DERMS or may directly change the schedule in emergency conditions
in real-time operation while notifying the DERMS of the change at the same time or later.
7.4.1 Impacts of DER on Distribution Power Quality
Intermittency in DER outputs in terms of real and reactive power will have considerable impact
on power quality of the distribution grid. It can induce significant power fluctuations and
frequency/voltage oscillations. Meanwhile, harmonic currents generated by the DER inverters
can penetrate into the distribution grid through the PCC.
To guarantee that the DMS can effectively monitor and evaluate the impacts of the DER, it
should be capable of gathering information from the DERMS indicating power quality status of
each DER. Effective approaches for eliminating power quality problems from DER should be
deployed in the DMS to alleviate the DER’s influences based on the requirements of related
standards (e.g., the IEEE 1547 standard). Meanwhile, as a hybrid solution, the DERMS should
have the capability of mitigating the impact of power quality issues by itself.
7.4.2 Volt/VAR Support and Control
Based on the available VAR resources of DER provided by the DERMS, the DMS may request
additional volt/VAR support from some DER through the DERMS in addition to the normal
settings for the individual DER. The DERMS should include such demands into its overall
optimization process and provide updated DER operation schedules to the DMS. Once accepted
and committed, the new set points to the individual DER should be updated, and each of the
DER involved should operate around its new set points for volt/VAR control.
7.5 Strategies and Policies for Emergency Control and Management
The DERMS should actively participate in emergency control and management to assist the
DMS in relieving operational difficulties during emergency conditions as much as possible. It
may dynamically update the DMS with the available resources of DER. Based on the availability
of resources, it is the DMS’s responsibility to initiate requests for emergency support. These
requests may be in terms of real power increase or decrease in kW, reactive power increase or
decrease in kVAR, or generation shedding within a certain time period. The DERMS should
quickly respond to the request by either using its reserve margin or performing a fast resource
optimization by taking the emergency demands into account. The confirmed emergency schedule
should be forwarded to the DMS while controls are issued to the affected DER at the same time.
58
This page is intentionally left blank.

59
8 DMS Design Principles for Integration with DERMS and Microgrids
As discussed in the previous chapters, conventional DMS are generally designed for passive
distribution networks, where the energy sources are the primary buses of distribution substation
transformers and where power flows in one direction from the sources to the end consumers
through the distribution circuits. However, with the penetration of DER and microgrids, the
distribution networks are becoming highly active, with more and more DER and microgrid
connections. DER and microgrids generally have their own control and management systems,
including the DERMS for DER and the MCs for individual microgrids. The challenges for the
DMS are not only dealing with the active distribution networks but also integrating with the
DERMS and MCs. Meeting these challenges requires new principles and guidelines for
designing the new generation of DMS in order to achieve effective control and management of
the active distribution systems and seamless integration with DERMS and microgrids. As a brief
introduction, different approaches for integrating MCs and DERMS are shown in Figure 8-1.
The figure shows that MCs and DERMS can be flexibly integrated into the existing control
system of distribution grids. For example, an MC can be integrated into the DMS or connected to
it as a separate system. Meanwhile, a DERMS can also be integrated into an MC or become a
separate system.
Enterprise Integration Bus
SCADA
DERMSMC DERMSMC
DMS
DERMS
MC
DERMSMC DERMSMC DERMSMC
DERMS
MC
OMS DRM AMI GIS
Figure 8-1 Integration of Microgrid Controllers and DERMS
into the Existing Control Systems of Distribution Grids
8.1 DER and Microgrid Modeling in DMS
DER and microgrids are considered new components of DMS when compared with conventional
distribution grid operations. They need to be properly modeled first before they are included in
DMS functions and DMS integration.
8.1.1 DMS Model
The distribution network model itself may have no changes that are considered significant when
compared with the conventional passive network; however, it may need to include the
connection models of the DER and the microgrids.
60
8.1.2 Modeling DER in DMS
Individual DER may be presented in two different formats in the DMS, depending on the DER’s
size or capacity. Large DER (e.g., a major DER with a capacity of 30 kW or more), may be
presented as independent DER and have a dedicated or shared PCC. Smaller DER, such as
residential PV generators with capacities of less than 30 kW, may be aggregated at the user
transformer level. This model is similar to the conventional model of loads in the DMS, where
individual loads sharing the same user transformer are usually aggregated as a single load in the
DMS model. Each DER included in the DMS model, regardless of whether it is an independent
DER or an aggregated one, should be modeled at a sufficient level of detail so that both its static
and its dynamic operational characteristics are represented. The details would include the
operational limits on the voltage range, real and reactive power outputs, internal impedance,
phase connection types (delta/Y with or without grounding), and response rate (power ramping).
8.1.3 Modeling Microgrids in DMS
The generation resources, loads, and distribution network of a microgrid are directly controlled
and managed by its internal controller and may not be visible to the DMS in terms of individual
components. However, the DMS may model microgrids as special energy entities that can be
either equivalent loads or equivalent energy resources at the PCC, including their real and
reactive power limits as loads and energy resources, their available capacities in real-time
operation, the response rates, etc. The DMS may also obtain a simplified network topology
model along with the status of the tie-switches if more than one active PCC is involved in a
microgrid when it is connected to the distribution grid. By using the simplified topology model
and tie-switch status, the DMS can find out if the active PCC would form parallel power flow
paths or hidden loops to the distribution grid. The interconnections between two or more
microgrids may also form hidden loops, although each of them may have only one active PCC to
the distribution grid. In such cases, the DMS may also include a simplified topology model for
the interconnections among the microgrids.
8.2 Data Exchange Requirements
The communication integration of the DMS with microgrids and DERMS can be implemented in
many ways; examples include peer-to-peer communication that uses a proprietary data exchange
format or a connection to the ESB through standard data exchange, such as IEC 61970/61968.
8.2.1 Data Exchange between DMS and Microgrids
The data exchange needs for integrating the DMS with microgrids are mainly at the PCC and
include the following.
8.2.1.1 Connection Status
Both the DMS and the microgrid should receive information about the connection status at the
PCC.
8.2.1.2 Voltages
Both the DMS and the MC should receive information on the target and actual voltages at each
active PCC when the microgrid is connected to the distribution grid. The microgrid may need to
61
receive information on the voltages at both sides of a PCC when it is disconnected and there is an
intention to reconnect.
8.2.1.3 Power Exchanges
Both the DMS and the MC should receive information on the actual real and reactive power
exchanges at each active PCC and the net target power exchanges between the two parties. Each
system should be alerted if any significant unintentional wheeling exists, and the microgrid
should take action to keep it from occurring.
8.2.1.4 System Frequency
The microgrid should monitor the distribution grid frequency when it is disconnected and there is
an intention to reconnect it to the grid. Once connected, the system frequency would be the same
on both sides.
8.2.1.5 Power Exchange Schedules
Power exchanges between the distribution grid and the microgrid may be prescheduled so that
the available energy resources can be optimally shared. Both parties may negotiate iteratively
over tentative schedules before finalizing a formal schedule for commitment. Once both parties
are committed, they should follow the schedule as closely as possible; adopting this approach
may mainly be the responsibility of the microgrid, which can effectively control its energy
resources to balance its internal demands and the exchanges through the PCC. The committed
schedules may be cancelled or terminated at any time under emergency conditions, and new
emergency schedules may be added in some cases.
8.2.1.6 Simplified Operation Topology of the Microgrid
When more than one PCC is activated, the microgrid should provide a simplified operation
topology to the DMS for its monitoring of possible loops formed by the PCC, plus also provide
alerts of possible wheeling.
8.2.1.7 Connection/Disconnection Requests
The microgrid may request permission from the DMS to connect to or disconnect from
(intentional disconnection) the distribution grid, and the DMS may approve or reject the
connection request and accept a disconnection request right away or ask for a short time delay.
On the other hand, the DMS may also request the microgrid to connect to or disconnect from the
distribution grid, and the microgrid may accept or reject the connection request and ask for a
short time delay for a disconnection request. Under emergency conditions, each party may
initiate the process of disconnection without asking for approval. (For example, the DMS may
send a transfer trip command to the tie-switch of a PCC if the corresponding feeder is tripped
because of a contingency.)
8.2.2 Data Exchange between the DMS and DERMS
The data exchange between the DMS and DERMS may occur at a high level when compared
with the exchange between the DMS and the microgrids.
62
8.2.2.1 Distribution System Model
A DERMS can use exactly the same distribution grid model to perform its functions as that used
by the DMS. It may also use simplified models in its internal processing, like the hierarchical
model discussed in Section 7.1.1 and shown in Figure 7-2. These models may be a good
compromise between the complexity and the capabilities needed for DERMS functionalities and
objectives, such that the DER are effectively organized and aggregated from different aspects
while the basic topological information is also taken into account.
8.2.2.2 Aggregated DER Groups (VGUs)
The DERMS may pass the aggregated DER groups (VGUs) to the DMS for proper modeling of
the DER in the DMS and its advanced applications, including the aggregated capacities in real
and reactive power operation ranges, fault current contribution, internal impedances, and their
availabilities from time to time.
8.2.2.3 Grid and DER Operational Conditions
DERMS may need to understand the current and predicted operational conditions of the
distribution grid based on the committed operation schedules and the forecasted demands from
the DMS, including the field loading conditions and voltage profiles. At the same time, the
DERMS may directly monitor and control the individual DER, monitoring its operational
conditions in terms of the PCC status, terminal voltages, and real and reactive power outputs.
Monitoring may also be performed indirectly, by relying on the DMS to carry out the direct
monitoring and control and forwarding the information to it.
8.2.2.4 DER (VGU) Operational Schedules
The DERMS may provide the committed operational schedules of the individual DER groups
(VGUs) to the DMS to obtain the benefit of overall distribution system operation. Before a
schedule is finalized, a few iterations between the DERMS and DMS may be needed for mutual
validation and confirmation.
8.2.2.5 Emergency Requests
The DMS may make an emergency request to DERMS for increasing or decreasing the real
and/or reactive power outputs from some dedicated VGUs, or it may request a certain amount of
generation shedding in the scope of a feeder section, feeder, group of feeders, substation, or
group of substations.
8.3 Advanced DMS Applications for Active Distribution Networks
As described in the previous sections, the distribution grid is becoming highly active with a
higher penetration of DER and microgrid connections. Advanced applications in the DMS are
facing completely new environments that are not like the traditional passive networks that were
the basis of conventional applications, and the result is a series of challenges. The most
important challenge comes from the bidirectional power flow in the grid, which may change
from time to time depending on the real-time dynamics of the load and the DER generation
distributions. The second challenge comes from the additional uncertainties associated with DER
generation, in that most of the generation may come from renewable resources. DMS
63
applications may thus need to be sufficiently robust and able to respond quickly in order to cope
with dramatic changes in conditions. Some of the key applications may need to be able to look
ahead when providing predicted operational schedules and strategies, including VVO, FLISR,
and ONR. The following text discusses sample features for a few typical DMS applications.
8.3.1 Topology Processor
The TP will no longer be able to determine flow directions purely on the basis of network
connectivity. The flow directions of the individual feeder sections may have to be determined
from power flow results for the OLPF based on the actual network topology, load, and DG
distributions. The directions of real and reactive power flows at each phase may not be the same.
8.3.2 On-line Power Flow
Although distribution grids may become highly active with bidirectional power flows, they may
also still remain in a radial configuration, sometimes with a few loops, which is similar to what is
found in conventional passive networks. Therefore, fundamental changes to power flow solution
algorithms or methods may or may not be required just because of the DER and microgrid
connections.
Some of the DER may be rotational machine-based and others may be inverter-based. With
regard to rotational machine-based DER (usually with three phases), their internal source
voltages would be well balanced among the three phases; however, their power outputs among
the three phases may vary significantly depending on grid operational conditions, even though
the total output from the three phases may be a given and fixed quantity. It is not possible to
specify power outputs for the individual phases for a rotational machine-based generator, so it
would thus naturally share the unbalanced loads proportionally. With regard to an inverter-based
DER, however, its power output can be specified both for the total output and for the individual
phases. If it is specified for the total power injection to the grid, one may assume that its internal
three-phase voltages would be balanced and that the output power at each phase would be
determined by the grid operational condition, a situation that is similar to that associated with
rotational machine-based generators. If power output is specified for the individual three phases,
that may mean that it has chosen to balance the unbalanced local loads.
8.3.3 Short-Circuit Analysis
Similar to the OLPF, SCA may or may not require fundamental changes to the solution
algorithms. But some of the DER may be strong contributors to the fault currents, leading to
multiple fault current contribution sources, a situation that is quite different from that of
conventional passive networks. On the other hand, the inverter-based DER generally are not
strong contributors to the fault current, even though they may still play important roles during the
first couple of cycles. Special attention to inverter-based DER may be needed on a case-by-case
basis.
8.3.4 Fault Location, Isolation, and Service Restoration
The penetration of DER and microgrids may introduce significant challenges with regard to
FLISR. This challenge is the result because conventionally, FLISR was generally designed to
64
consider only the restoration of load service; no DER generation was in the scope of
consideration. The objectives, algorithms, and approaches of FLISR may need to be reconsidered
by taking into account the impacts of DER and microgrids in restoration plans, including the
restoration of both load and DER generation. The transition in which load is restored first and
then generation is restored later may occur because the DER may have been disconnected during
de-energization and will not reconnect right away when the feeder is energized again.
8.3.5 Volt/VAR Optimization
VVO is generally designed to control capacitor banks and substation transformer taps and feeder
voltage regulators. These are all binary control variables. The connections of DER and
microgrids may provide additional VAR resources for voltage and VAR control and optimization
in VVO. These resources will be continuous control variables, resulting in more complicated
mixed-integer programming problems in VVO optimization. Moreover, fluctuations in the DER
outputs may have additional impacts on VVO operation that may have to be considered in
revised solution approaches.
8.3.6 Optimal Network Reconfiguration
ONR is generally designed to minimize network energy losses while maintaining good voltage
profiles in the grid within a given time period. Similar to other DMS applications, it is built on
the basis of passive distribution networks. The connections of DER and microgrids will also
introduce great challenges for the ONR. It may have to include the DER and microgrid
operational schedules in its optimization process and apply a look-ahead logic. It may also have
to include some of the DER and microgrids as dispatchable resources in its optimization. Such a
design will allow ONR to generate the optimal overall configuration, which results in better use
of DER resources and optimal recommended schedules being submitted to DERMS and DMS
for consideration and validation.
8.4 Monitoring and Control Requirements
In addition to addressing conventional monitoring and control functions, integrating DMS with
microgrids and DER will extend the functionalities in its monitoring, control, and management
of the distribution system. There will be more “knowing” and less “guessing” based on the
understanding of the current operational condition that is gained and also based on the look-
ahead knowledge of conditions provided via the availability of the operational schedules of the
DER and microgrids provided by DERMS and the microgrids, respectively. However, this
integration also means that the DMS would need to extend its operational scope to include the
monitoring and tracking of the committed operational schedules from DERMS and the
microgrids and the validation or verification of the proposed schedules prior to formal
commitment.
8.5 Communication System Requirements
The underlying communication system to support the monitoring and control of the integration
of DER and microgrids into the DMS needs to be properly designed. As discussed in Section 4.3,
many communications and networking technologies provide available options for such a design,
including traditional twisted-copper phone lines; cable lines; fiber-optic cable; wireless cellular,
65
satellite, and power line carriers; and wireless short-range networks such as Wi-Fi and ZigBee.
For each technology, several standards and protocols can be chosen, and the communication
network topology parameters need to be designed properly, as well. For the integration of DER
and microgrids into the DMS, the communication system requirements should be based on the
architectural design and supported applications. The criteria are discussed in the following
sections.
8.5.1 Bandwidth
The bandwidth requirements of communication systems for integrating DER and microgrids into
the DMS depend on the control architecture and the applications to be supported. For example, if
the DMS needs to receive information on all of the details of the DER managed by DERMS, the
communication link between DERMS and the DMS needs to be stronger than it is for a case that
only requires aggregated information to be exchanged between DERMS and the DMS. A similar
case also applies to the communication link between the MC and the DMS. The more
applications there are to be supported, the more bandwidth requirements there will be. Therefore,
the bandwidth requirements of the communication system should cover all of these aspects.
8.5.2 Quality of Service
To specify the QoS requirements of the communication system in terms of communication
latency and data accuracy, each individual application related to the integration of
DER/microgrids with the DMS should be investigated in order to properly specify the latency
and accuracy requirements. The communication protocols need to have the mechanisms to adjust
the accuracy and latency of data transmission in coping with the various QoS requirements for
different applications.
8.5.3 Data Storage
This requirement also depends on the applications related to the integration of DER/microgrids
with the DMS. The data storage (buffer) in the communication networks needs to be designed
properly to account for the data flow features. For example, in protection and control, the
quantity of data is usually very small for a fast response, so a very limited amount of data storage
may be needed. On the other hand, for prediction or post-event analysis, a large volume of data
may be required, and a sufficient amount data storage would thus be needed.
8.5.4 Cybersecurity
The cybersecurity requirements for the communication system can refer to the EPRI report [10]
that specifies the cybersecurity requirement for the hierarchical control architecture of DER
systems. The DER and microgrids may need to be compatible with the hierarchical control
architecture presented in the report.
8.5.5 Interoperability
It is recommended that the new communication protocols to be used comply with the existing
standards for distribution systems, including Modbus, SEP2, and IEC 61850. Special attention
should be paid to Part 90-7 of standard IEC 61850, which describes the information model for
inverter-based DER in the communication networks [11].
66
8.5.6 Other Requirements
In addition to the requirements discussed above, some others should also be considered. For
instance, the communication distance between the individual DER and DERMS determines
whether a low-cost, short-range wireless local area network (WLAN) or a high-cost wireless
wide area network (WWAN) should be used when the wireless communication medium has been
chosen already. Budget constraints will play an important role in choosing which communication
medium should be used. This consideration is because wire-based communication has a huge
infrastructure cost, whereas a wireless solution may have a large spectrum cost. The physical
locations of the DER and DERMS determine the topology of the communication network
between the DER and DERMS. In this regard, the communication requirements largely depend
on a specific implementation of the DER/microgrid integration with the DMS.
8.6 Integrated Operation of DMS with Microgrids, DER, and DERMS
In the integrated operation of the DMS with DER and microgrids, the objective is not only to
enable mutual data sharing for better functionality and performance of tasks but also to achieve
better coordination in how the various functions operate in the relatively independent systems. It
may be the responsibility of the DMS to set operational guidelines and track the performance of
the other systems by monitoring real-time system operational conditions and analyzing the
committed operational schedules of the DER and microgrids. Suggestions or warnings may be
generated and passed to the corresponding systems for their alerts. Under emergency conditions,
the DMS may undertake immediate control actions based on its operational rules in order to
contain the problem and keep damage to a minimum before other parties are notified.
The subsections below discuss a few typical issues and approaches to such integration.
8.6.1 Integration Approaches
The integration of the DMS with the DERMS and microgrids can be implemented in many
different ways. Listed here are a few sample integration approaches.
8.6.1.1 Integration through ESB
Similar to the integration of the DMS with other connected systems (e.g., OMS, AMI, DRMS),
the DMS integration with the DERMS and microgrids can be implemented through an ESB, as
shown in Figure 8-2.

67
Figure 8-2 DMS Integration with DERMS and Microgrids through ESB
As shown in Figure 8-2, the DMS, microgrids, and DERMS are treated equally from an ESB
standpoint, because each system connects to the ESB through its communication system, and
because all of the data communication among the systems is through the ESB, with all of the
data needed from other systems being available at the ESB.
The MCs and DERMS, as well as the other systems, may not necessarily be in the same physical
location as the DMS. As a matter of the fact, the MCs may be installed in the physical locations
of the microgrids or be located somewhere else. It may also be the case that one MC controls
several microgrids that are far away from each other. Similarly, the DERMS may also be located
somewhere other than where the DMS is, such as in a substation, in another city, or even in a
cloud server. There could also be more than one DERMS for one DMS. In other words, multiple
DERMS could be integrated with one DMS. For example, one DERMS may cover only one
substation or a few substations, with each one being independent of the others. On the other hand,
one DERMS may partially cover the scope of two or more DMS, assuming that these DMS have
no coverage overlaps within the distribution grids.
8.6.1.2 Peer-to-Peer Integration
The integration of the DMS with DERMS and microgrids can also be implemented in a peer-to-
peer format through proprietary data communication. In this case, DERMS and microgrids may
appear like clients to the DMS, and they may be invisible at the ESB level where the DMS may
integrate with the other systems.
8.6.1.3 Embedded Integration
As mentioned in the introductory chapter of this document, the functions of microgrid control
systems and/or DERMS may be embedded in the DMS as subfunctions or applications in some
implementations. In such cases, the MCs and/or DERMS may be invisible to the external
systems. However, the data communication and the base operation rules of the microgrids and
68
DERMS would remain in the embedded modules. The only difference would be that the physical
communication medium would be different. In the embedded case, the physical communication
medium may be just simply memory function calls.
8.6.2 More Than One Active PCC in a Microgrid
A microgrid may have more than one active PCC connected to the distribution grid. It may also
directly connect to other adjacent microgrids that may have one or more PCC to the distribution
grid. The PCC may be on the same feeder circuit, or they may be on different feeder circuits in
the same substation or in different substations in the grid. They may form unintentional wheeling
paths and hidden loops to the distribution grid if the DMS has not received sufficient information
about the internal topologies of the microgrids. It is strongly recommended that microgrids with
more than one PCC provide their simplified operation topologies, if not their complete ones, to
the DMS to avoid the possible lack of awareness of hidden loops formed by these PCC.
8.6.3 Phase Balancing of DER
As briefly mentioned in Section 8.3.2, inverter-based DER may have their phase power output
dispatchable; their power output at each phase can be allocated within the phase limits. This
feature can be used to balance some unbalanced local loads. However, it may also cause a further
unbalanced condition if the feature is not properly used. For example, if every DER is specified
with balanced three-phase power output, and if the loads are actually not well balanced in the
feeder circuits, the DER will transfer the total unbalanced portion of the loads up to the
distribution substation transformer, resulting in a more unbalanced operation condition.
Therefore, it is important to allocate the unbalanced loads properly to the DERs. It may be better
to take default settings in order for the DER to behave like the rotational machine-based
generators if no good unbalance control logic is available for properly dealing with phase
balancing. This approach means that the inverter-based DER are set to operate with balanced
three-phase voltages internally.
8.7 Protection Schemes for Microgrids/DER and the Distribution Grid
As discussed in Subsections 2.3.4, 3.8, and 6.8, the penetration of DER and microgrids will have
a significant impact on the existing protection schemes in the distribution systems. The following
subsections discuss the requirements of protection schemes for maintaining operational
reliability with regard to the connections of the DER and microgrids to the distribution grids.
8.7.1 Faults in Microgrids
The protection scheme of a microgrid should be able to detect its internal fault and isolate it
quickly before it causes significant impacts on the operation of its internal grid and then on the
distribution grid if it is in grid-connected mode. It should disconnect itself from the distribution
grid if the fault is observed at the PCC and reaches the predefined criteria for disconnection
(e.g., fault direction, current magnitude, and time duration for the directional time-inverse
protection scheme).
69
A backup protection scheme may also be applied by the distribution grid to ensure that the faults
that occur in a microgrid can be effectively isolated at the PCC in case its internal protection
scheme fails.
8.7.2 Faults in DER
Although DER generally do not have their own local grids, they may have internal circuit faults,
and they should have corresponding protection schemes to detect such faults and disconnect
themselves from the grid at the PCC when such faults occur.
8.7.3 Faults in the Distribution Grid
The protection schemes in the distribution grid should isolate the faults that are occurring in that
grid. However, the microgrids and the DER should also protect themselves from the impacts of
grid faults. They should be able to detect the faults that occur at the grid side. The microgrids and
DER may implement advanced schemes that can intelligently determine whether they should
disconnect from the grid right away or try to “ride though” first before disconnecting.
The grid protection scheme may actively disconnect the microgrids and DER through transfer
trips when the corresponding part of the distribution circuits is de-energized. This scheme
ensures that the related microgrids and DER are not able to energize the isolated part of the
distribution circuits. Of course, the microgrids and DER connected to that part of the distribution
circuits should have protection schemes to detect the de-energization and disconnect themselves
from the grid automatically.
8.7.4 Distribution Grid Protection with Microgrids and DER Connected
When the microgrids and DER are connected, the fault current contribution will no longer be
from a single source but instead from multiple sources and multiple paths spread across the
entire distribution grid. The protection schemes have to adapt to this change with corresponding
strategies and effective approaches.
The schemes may need to relate to directional protection functionalities, because the fault current
at a feeder section could travel in either direction and may need different settings for different
directions.
Also, protection coordination in different locations along the distribution feeder circuits may be
dynamic or may depend on operational conditions, which could add more complexities to the
protection coordination in addition to the directional schemes.
In addition, the protection settings may have to be based on the topology configurations, where a
topology change due to a contingency or operational request may result in significant changes to
the relay settings.
Moreover, the DER may have significantly different fault characteristics, which largely depend
on their energy conversion schemes. Generally, a rotational machine-based DER may have a
much higher fault-current contribution than that of an inverter-based DER. Therefore, for the
70
same fault location and the same fault impedance, the fault current at the fault point and the fault
current distribution in the distribution grid may vary significantly, depending on what types of
DER are active when the fault occurs, where they are located in the grid, and what the grid
topology configuration is. These are serious concerns for protection engineers when it comes to
distribution grid protection that requires practical solutions.
8.8 Use Cases for the Integration of Microgrid Controller, DERMS, and DMS
Various use cases can be employed to test the integration of the MC, DERMS, and DMS
(e.g., frequency regulation, voltage control in grid-connected or islanding operational modes,
load management). Some of the use cases can be found in EPRI’s report in [1].
71
9 Summary and Conclusion
This document provides general and practical guidelines for integrating the DMS with
microgrids and DER. The fundamental challenges to distribution grid operation posed by
penetration of the use of DER and microgrids, the current status of DMS, the basic concepts of
microgrids and DERMS, and finally the fundamental principles and strategies for DMS
integration with microgrids and DERMS are discussed.
9.1 Challenges and Objectives
Distribution power grids are becoming highly active networks with more DER and microgrid
connections. Power flow is no longer static and flowing one way from the substation
transformers to the end users, but instead is dynamic and flowing two ways. The changes in
power flow direction depend on the operational dynamics of the dispersed DER and microgrids
and the distribution of loads along distribution circuits. The microgrids are generally small,
independent, local grids with their own loads and generation resources and dedicated controls
and operational rules and regulations. Microgrids can operate in a grid-connected mode or an
islanded mode with respect to the distribution grids. The individual DER can operate in a way
similar to the way that the microgrid operates, but they can also be under a centralized control
and management system through a DERMS, which performs aggregated control, management,
and optimization of the widely dispersed DER in the distribution circuits. All these features
introduce a variety of challenges to be addressed by the DMS, which is responsible for managing
and controlling the overall operation of a distribution grid. In order for the various functions to
work in harmony to achieve the same operational objectives as those of the distribution grid,
there should be common guidelines for implementing and integrating the relatively independent
systems by following the same principles and rules for data sharing and information exchange, as
well as functional boundaries and responsibilities.
9.2 Current Status of DMS and New Challenges
A DMS may cover an entire distribution grid or only a subset of the system, such as a group of
substations of the distribution grid. The DMS generally has full responsibility for the overall
operation of the entire grid or part of the grid.
Most of the DMS in operation today are designed to meet operational requirements for the
automation and management of traditional distribution grids. The fundamental features of the
traditional distribution systems include passive networks and radial configurations. These
features are the basic foundation for today’s DMS designs and implementations; they include the
grid modeling, data structures, and advanced application algorithms. A typical DMS generally
consists of several subsystems and software modules. The overall architecture of a DMS with
these components may still work fine for a new distribution grid with a high penetration of DER
and microgrids; however, the contents of these components may need to be extended
significantly or updated by incorporating the impacts of the transition from passive networks to
the active networks of the distribution grids.
72
9.3 DMS Integration with Microgrids
The physical interfaces of a distribution grid and microgrids are at the PCC, which is the
boundary between the two types of grids. The DMS is fully responsible for the operation of the
distribution grid, and an MC or a control system is fully responsible for its own internal grid.
Both parties are responsible for the operation of the PCC when the microgrid is in the grid-
connected mode and the transitions from one mode to the other; the responsibilities include
maintaining desired voltage profiles, constant power exchange, intentional disconnection and
re-connection, mutual emergency support, and protection coordination.
A microgrid may be owned by customers, independent energy providers, the local electric utility,
or jointly by any combination of the above. The MC or microgrid control system may be
implemented as an independent entity located in a local or remote area (e.g., in a substation, in a
remote office, in the DMS control room, or even on a cloud server). It may also be implemented
as a subfunction or application of the DMS as a physical part of the DMS. However, the MC or
microgrid control system has its own responsibilities, tasks, and functionalities, regardless of
where it is located and how it is implemented. Similarly, although the integration of the DMS
and microgrid control systems may differ in actual implementations because of their locations
and the various implementation approaches, the basic principles and strategies would generally
apply, as long as the microgrids were classified as standard microgrids following industry
standards as defined in IEEE 1547.
9.4 DMS Integration with DERMS
DERMS is designed to manage and control the individual DER through the aggregation of the
dispersed DER that are participating in DERMS management across the distribution grid. It may
be that more than one DERMS covers the entire territory of a DMS, with each DERMS being
responsible for part of the distribution grid.
Similar to microgrids, a DERMS may be implemented in a substation, in a remote office, in a
control room, or even on a cloud server. It may also be implemented as a subfunction or
application of the DMS. However, these differences in location and how a DERMS is actually
implemented should not lead to different principles or strategies being applied in the
implementations. In fact, all of them should follow the common fundamental principles and
strategies.
9.5 Protection Schemes
The transition from a passive network to an active network can have significant impacts on and
result in challenges to conventional protection schemes, which have largely been based on the
features of passive networks and radial configurations of conventional distribution grids.
The new schemes have to deal with two-way power flows that dynamically change from time to
time depending on the operational conditions of the DER and the load distributions.
When integrating DMS with DERMS and microgrids, each party needs to account for the
corresponding coordination schemes while implementing the tasks and responsibilities of its own
scope of protection.
73
9.6 Design Principles of DMS Integration
This document provides a set of general and fundamental principles for designing how a DMS
integrates with DERMS and microgrids. It is based on the key features, characteristics, and
impacts of active distribution networks with a high penetration of DER and microgrids. These
include the relationships among the systems and their corresponding responsibilities and
boundaries in the integration, system modeling, data structures, and advanced algorithms in
advanced DMS applications, as well as the coordination of the protection schemes.
The principles and strategies proposed in the guidelines are generic and independent of the
physical locations and actual implementation approaches of DERMS and microgrid control
systems. They should be applicable to most of the integration implementations, as long as the
implementation and operation of the DERMS and microgrid systems follow the industry
standards defined in IEEE 1547.
Because DMS applications are being enhanced continuously, there have been some commercial
products in the marketplace. For instance, Siemens has proposed a solution for enhancing the
performance of the DMS by using three complete sets of advanced power system applications.
These can be configured as a stand-alone system or integrated with the existing SCADA/DMS.
These three suites of power system applications are called Information Model Manager (IMM),
Cyber Security Manager (CSM), and Distribution Network Application (DNA) [13]. Alstom has
developed an integrated tool for achieving smart distribution and making critical and timely
decisions called the Integrated Distribution Management System (IDMS). In this tool, multiple
functions are combined in a single, integrated environment, and a complete solution is provided
that covers modeling, secure integration, operations, reliability, awareness, optimization, and
other features [14]. Schneider Electric has proposed an advanced DMS solution to consolidate
three basic and conventional parts (SCADA, DMS, and OMS). This solution has the advantage
of being a single version that can be shared among the three systems; it includes a unique
security system, a unique user interface, complete functionalities, closed-loop control and
management, advanced protection, and other features [15]. ABB has developed Network
Manager SCADA/DMS as a distribution management solution. It achieves the seamless
integration of a DMS and an enterprise information system, and it provides a complete model of
the electrical network under control. Network Manager SCADA/DMS can effectively manage
the operation of a distribution network, and it enhances the information exchange between
operators and customers [16].
74
This page is intentionally left blank.
75
10 References
[1] A. Maitra, J. Simmins, B. Seal, R. Sarfi, and L. Mathys, Grid Interactive Microgrid
Controllers and the Management of Aggregated Distributed Energy Resources, Electric
Power Research Institute (EPRI), August 2015.
[2] Institute of Electrical and Electronics Engineers (IEEE), “IEEE Standard for
Interconnecting Distributed Resources with Electric Power Systems,” IEEE Std. 1547-2003,
pp. 1–28, July 2003.
[3] J. Fan and S. Borlase, “The Evolution of Distribution,” IEEE Power & Energy Magazine
Vol. 7, No. 2, pp. 63–68, March/April 2015.
[4] S. Borlase, et al., “Distribution Systems,” Section 3.5 in SMART GRIDS — Infrastructure,
Technology, and Solutions, CRC Press, by Taylor & Francis Group, LLC, 2013.
[5] B. Uluski, “Distribution Management System,” presented at CRN Summit, Cleveland, OH,
July 2011.
[6] B. Uluski, “Volt/VAR Control and Optimization,” presented at CIRED, Stockholm,
Sweden, June 2013.
[7] B. Uluski, “Role of DERMS/DMS in Managing Distributed Energy Resources,” presented
at IEEE PES General Meeting Panel Session, Denver, CO, July 2015.
[8] U.S. Department of Energy (DOE), Communications Requirements of Smart Grid
Technologies, 2010.
[9] National Institute of Standards and Technology (NIST), NISTIR 7628: Guideline for Smart
Grid Cybersecurity, Vol. 1, “Smart Grid Cybersecurity Strategy, Architecture, and High-
Level Requirements,” Gaithersburg, MD, 2014.
[10] F. Cleveland and A. Lee, NESCOR: Cyber Security for DER Systems, Electric Power
Research Institute (EPRI), 2013.
[11] International Electrotechnical Commission (IEC), Communication Networks and Systems
for Power Utility Automation — Part 90-7: Object Models for Power Converters in
Distributed Energy Resources (DER) Systems, 2013.
[12] R. Brundlinger, et al. “Lab Tests,” IEEE Power & Enegy Magazine, Vol. 13, No. 2,
pp. 3042, March/April 2015.
[13] Siemens Industry, Inc., Distribution Management System (DMS) Components, 2015, DMS
solution at http://w3.usa.siemens.com/smartgrid/us/en/distribution-grid/products/
distribution-management-system-components/pages/dms-components.aspx, accessed
August 2015.
[14] Alstom, text under Distribution tab, 2015, DMS solution at http://www.alstom.com/grid/
products-and-services/electrical-network-systems/electrical-distribution-management/,
accessed August 2015.
[15] Schneider Electric, Advanced Distribution Management System, 2014, DMS solution
at http://www.schneider-electric-dms.com/?page_id=34, accessed August 2015.
[16] ABB, Network Manager SCADA/DMS, 2015, DMS solution at http://www.abb.com/
industries/db0003db004333/c12573e7003305cbc12570260038d185.aspx, accessed
August 2015.
76
This page is intentionally left blank.
A-i
Appendix A: Distribution Management System Functions

A-ii
Advanced Distribution Management Systems for Grid Modernization
Distribution Management System Functions
August 2015
A-iii
Appendix A — Table of Contents
A.1 DMS Functions ................................................................................................................. A-1
A.1.1 What Is a DMS? ................................................................................................ A-1
A.1.1.1 DMS Basic Building Blocks ............................................................. A-2
A.1.2 DMS Application Functions .............................................................................. A-6
A.1.3 Data Acquisition & Control .............................................................................. A-7
A.1.4 State Estimation ................................................................................................. A-9
A.1.5 Graphical User Interface (GUI) ....................................................................... A-10
A.1.6 Historical Information System (HIS) .............................................................. A-12
A.1.7 Distribution System Model ............................................................................. A-13
A.1.7.1 Modeling the Transmission System ................................................ A-16
A.1.7.2 Modeling the Substations ................................................................ A-17
A.1.7.3 Modeling the Distribution Secondary Circuits ............................... A-17
A.1.7.4 Load Models ................................................................................... A-18
A.1.7.5 Electronic Map/Model Updates ...................................................... A-20
A.1.8 Topology Processor ......................................................................................... A-21
A.1.9 On-Line Distribution Power Flow ................................................................... A-22
A.1.10 Intelligent Alarm Processing ........................................................................... A-23
A.1.11 Tagging, Permits, and Clearances ................................................................... A-25
A.1.12 Short-Circuit Analysis ..................................................................................... A-25
A.1.13 Switch Order Management .............................................................................. A-26
A.1.14 Volt-VAR Optimization .................................................................................. A-28
A.1.15 Fault Location, Isolation, and Service Restoration ......................................... A-30
A.1.16 Predictive Fault Location ................................................................................ A-31
A.1.17 Optimal Network Reconfiguration .................................................................. A-32
A.1.18 Short-Term Load Forecasting ......................................................................... A-33
A.1.19 Dynamic Equipment Rating ............................................................................ A-33
A.1.20 DMS Control of Protection Settings (Adaptive Protection) ............................ A-34
A.1.21 Distributed Energy Resource Management ..................................................... A-34
A.1.22 Demand Response Management ..................................................................... A-36
A.1.23 Emergency Load Shedding ............................................................................. A-37
A.1.24 Smart EV Charging ......................................................................................... A-37
A.1.25 Asset Management .......................................................................................... A-37
A-v
Figures
A-1 Distribution SCADA System ........................................................................................... A-2
A-2 Separation of DSCADA and DERMS Functionality ....................................................... A-3
A-3 Interaction between Advanced Distribution Applications and DSCADA ....................... A-4
A-4 Corporate Enterprise System Integration ......................................................................... A-5
A-5 DMS User Workstation .................................................................................................. A-11
A-6 DMS Graphical Displays ................................................................................................ A-12
A-7 Distribution System Model ............................................................................................ A-13
A-8 Representative Load Profile ........................................................................................... A-19
A-9 Hand-Drawn Map Update (Red lines) ............................................................................ A-21
A-10 Colorization of Individual Feeders by the Topology Processor ..................................... A-22
A-11 Voltage Violation Highlighting ...................................................................................... A-24
A-12 Switching Orders ............................................................................................................ A-26
A-13 Geographic versus Schematic View ............................................................................... A-27
A-14 Selecting an Area for Automatic Switch Order Creation ............................................... A-27
A-15 VVO DMS-Based Model-Driven Solution .................................................................... A-29
A-16 Predictive Fault Location ............................................................................................... A-32
A-17 Separation of DSCADA and DERMS Functionality ..................................................... A-35
A-vi
This page is intentionally left blank.
A-1
A.1 DMS Functions
This report lists the major distribution management system (DMS) application functions and
provides a description of each. This list of DMS application functions is based on survey
responses submitted by electric utilities that have implemented or are planning to implement a
DMS. The list of DMS functions also considers survey responses received from vendors,
consultants, research organizations, and academic institutions.
The description of each DMS application includes a list of functional requirements, along with
key features and characteristics of each application that are needed in current and future DMS
deployments. The description also summarizes major benefits provided by each function to the
various stakeholders (e.g., customers, shareholders), with due consideration of the fact that the
realizable benefits of each function may be different for each type of utility (e.g., investor-owned
utility [IOU], cooperative, and municipal).
The results of this subtask are sufficient to define the functional requirements of each application
for system procurement (Request for Proposal [RFP]) purposes and for developing preliminary
high-level use cases for each function. However, the document is not a detailed design document
that will enable a vendor or software developer to actually design and build the application.
A.1.1 What Is a DMS?
Because there is no widely accepted industry definition for DMS, the IEEE Power and Energy
Society (PES) DMS task force has adopted the following definition:
“A DMS is a decision support system that is intended to assist the distribution system
operators, engineers, technicians, managers and other personnel in monitoring,
controlling, and optimizing the performance of the electric distribution system without
jeopardizing the safety of the field workforce and the general public and without
jeopardizing the protection of electric distribution assets.”
The following are several key points pertaining to this definition:
• The DMS should be viewed as a tool that assists the distribution system operators in the
control center and in the field in performing their duties. The DMS is not intended to
replace human judgment and decision-making.
• DMS users are not limited to distribution system operators in the control center and in the
field. DMS stakeholders and users also include engineers who may use the DMS for
engineering analysis and studies, technicians who may use the DMS for troubleshooting
and maintenance, and managers who may use the DMS for oversight and overall decision
making support.
• The DMS should play a key role in improving (optimizing) the efficiency, reliability and
overall performance of the electric distribution system. Optimizing distribution system
performance is often the primary motivator for DMS deployment. Advanced applications
that assist in determining operating actions needed for improved performance are one of
the key distinguishing factors of the DMS.

A-2
• The two most fundamental operating objectives—safety and asset protection—must
never be compromised by the desire to improve performance. In fact, the major driving
factors for DMS deployment often include improving safety and asset protection.
A.1.1.1 DMS Basic Building Blocks
The DMS concept is best described by looking at the component parts or basic building blocks
that make up the DMS.
A.1.1.1.1 Distribution SCADA System
The foundation on which DMS is based is the distribution supervisory control and data
acquisition (DSCADA) system (see Figure A-1). The DSCADA system provides the “field-
facing” interface that enables the DMS to monitor the distribution field equipment in real-time
(measurements made and reported in 1 minute or less on average) or near-real-time
(measurements made and reported every 10 to 15 minutes on average). DSCADA also enables
the DMS to initiate and execute remote control actions for controllable field devices in response
to operator commands or application function control actions. Examples of control actions
include opening/closing a medium voltage line switch, raising/lowering a voltage regulator tap-
setting, and switching a capacitor bank on or off.
Figure A-1 Distribution SCADA System
The degree to which distribution field devices are monitored and controlled by DSCADA varies
widely from utility to utility. Many utilities have implemented DSCADA facilities for their
electric distribution substations. However, far fewer utilities have implemented continuous
monitoring and control of power apparatus that is installed out on the feeders themselves (outside
the substation fence). A growing number of electric distribution utilities are currently
implementing DSCADA for feeder devices as part of their grid modernization strategy. The
ability to monitor and control feeder devices, such as automated line switches and reclosers,
switched capacitor banks, and voltage regulators, and the ability to continuously monitor stand-
alone distribution sensors (e.g., faulted circuit indicators [FCIs], current/voltage sensors) are seen
as essential for improving the overall performance of the distribution system.
Field Devices
Distribution
SCADA
Substation
Devices
Distribution SCADA provides
“Real-Time” or “Near –Real
Time” Monitoring and Control of
power apparatus in substations
and in the field

A-3
As the penetration level of distributed energy resources (DER) (distributed generators, energy
storage devices, and controllable loads) continues to grow, these devices will have a significant
impact on overall distribution system performance. As a result, continuous monitoring and
control of these DER may be needed. An approach to DER monitoring and control that is being
researched by the Electric Power Research Institute (EPRI) and other research organizations is
the concept of a DER management system (DERMS) which handles the direct interface to DER
rather than DSCADA for monitoring and control purposes. The DMS will obtain DER-related
information as needed via enterprise system integration techniques such as enterprise service bus
(ESB). Figure A-2 illustrates the separation of DSCADA and DERMS functionality for field
device monitoring and control.
Figure A-2 Separation of DSCADA and DERMS Functionality
Field-facing interfaces to other grid modernization devices, such as plug-in electric vehicles
(PEVs) and advanced metering infrastructure (AMI), are expected to be handled in much the
same manner as DER. That is, the interface to advanced customer meters will most likely be
handled by a meter data management system (MDMS), which exchanges data as needed with
DMS via ESB or other integration technique. Similarly, the interface to PEV charging
infrastructure may be handled by an electric vehicle management system (EVMS).
The DSCADA building block may also include some additional basic functionality, such as
simple alarm checking, graphical user interface (GUI) for viewing data (tabular and schematic
displays), and data archiving. However, more advanced functionality, such as geographic
displays and distribution system modeling, are usually not considered part of DSCADA.
Field Devices
Distribution
SCADA
Substation
Devices
•Basic alarms
•Displays
•Archiving
Advanced
Distribution
Applications
•Data Management
•Operating model
•On-line power flow
•Volt VAR
•Auto restoration
DMS
Advanced
Metering
System (AMI)
Outage
Management
System (OMS)
Geographic
Information
System (GIS)
Enterprise
Service
Bus
E
S
B
DER
Interfaces
•DER Monitoring
•Smart Inverter
Functions
Advanced
DER
Applications
•Request VAR support
•Request Watt support
•Limit generation
•DER forecast
•Others
DERs
DERMS

A-4
A.1.1.1.2 Advanced Distribution Applications
The next major DMS building block includes the advanced distribution applications which use
the information acquired by DSCADA to improve overall distribution system performance.
Advanced applications build on DSCADA monitoring and control capabilities to provide
electronic decision-making and automatic control capabilities for system “optimization.”
Advanced distribution system applications that determine control actions needed to optimize
distribution system performance execute control actions via DSCADA. Adding advanced
distribution applications provides a clear distinction between DMS and DSCADA. Figure A-3
shows the interaction between the advanced applications and DSCADA building blocks.
Figure A-3 Interaction between Advanced Distribution Applications and DSCADA
Examples of advanced distribution applications that are often included in this DMS building
block are listed below. Note that this is just a partial list of the DMS advanced application suite.
More detailed descriptions of these application functions are provided later in this report.
• Distribution System Model. An electrical representation of the physical characteristics
and topology (connections between devices) of the electric distribution system. The
distribution system model may also include customer loading characteristics. The
distribution system model is a key application that enables many of the other DMS
applications.
• Geographical User Interface. The DMS application suite almost always includes a
geographically correct GUI. For example, the DMS is usually able to show feeder map
style displays with dynamically updating real-time and near-real-time information
superimposed on the map displays.
• On-Line Power Flow. The on-line power flow (OLPF) advanced application uses the
distribution system model and available DSCADA data to compute the electrical
conditions at any point on the feeder, including points that are not equipped with physical
monitoring facilities. The OLPF is one of the most important DMS application functions
because it enables numerous other applications, such as switch order management and
Volt-VAR optimization, to operate.
Field Devices
Distribution
SCADA
Advanced
Applications
Substation
Devices
Advanced
applications support
electronic decision
making and automatic
control capabilities for
system “optimization”
Build on SCADA
monitoring and
control capabilities
•Data Management
•Operating model
•On-line power flow
•Volt VAR
•Auto restoration
•DER management
•PEV Management
•DR management

A-5
• Switch Order Management (SOM). SOM enables the distribution system operators and
operations support staff to create and validate switching orders needed to isolate portions
of the distribution system that are being repaired or maintained while providing electrical
service to as many customers as possible.
• Volt-VAR Optimization (VVO). This application identifies a coordinated set of control
actions for distribution voltage regulators and VAR control devices that are needed to
achieve utility-specified operating objectives (e.g., improve voltage profile, reduce
electrical losses, lower demand, and promote energy conservation).
• Optimal Network Reconfiguration (ONR). This application identifies a set of line
switching actions that will enable the electric utility to achieve better load balance
between interconnected feeders, improved voltage profile, or other utility-specified
objective functions.
• Predictive Fault Location (PFL). This application uses fault magnitude from substation
intelligent electronic devices (IEDs), along with the distribution system model, to predict
the probable fault location, thus enabling more precise dispatching of field crews,
reduced fault investigation time, and faster service restoration.
A.1.1.1.3 Interfaces to External Systems
Another important DMS characteristic is the integration of advanced distribution applications
and DSCADA facilities with other corporate enterprise systems, such as the geographic
information system (GIS) and the outage management system (OMS). Figure A-4 shows the
addition of corporate enterprise integration facilities to the set of DMS building blocks.
Figure A-4 Corporate Enterprise System Integration
Distribution Management System Components
Interactions with Operational Support Systems
Field Devices
Distribution
SCADA
Advanced
Applications
Substation
Devices
Advanced
Metering
System (AMI)
Outage
Management
System (OMS)
Geographic
Information
System (GIS)
External
Interfaces
A-6
The purpose of each interface is summarized briefly below:
• Geographic Information System (GIS). The GIS is a data repository containing detailed
information about the electric distribution “physical” assets (e.g., poles, conductors,
transformers, line switches, capacitor banks, and voltage regulators). The detailed
information typically includes information about the physical characteristics and
electrical characteristics (e.g., electrical impedance, efficiency) of each device along with
the geographic location (latitude and longitude) of each device. This information is used
to construct and maintain the distribution system model used by many advanced DMS
functions. The GIS is also used to build and maintain a similar model used by the OMS.
Note that the OMS version of the model usually contains only the feeder topology, not
the electrical impedance and other information needed to run a load flow.
• Outage Management System (OMS). The OMS performs many essential functions to
assist distribution system dispatchers when customers are experiencing service
interruptions. One of the key OMS functions is “fault location prediction.” The OMS
applies individual customer outage telephone calls (or, more recently, “last gasp”
messages from AMI meters) to its distribution system model to determine which
calls/messages appear to be related to the same outage event. After the calls/messages
have been grouped, the OMS uses the model to search “upstream” (closer to the
substation) to determine which fault interrupting device operated for this event. This
information is used to direct field crews to the approximate location of the root cause of
the outage event. The OMS often includes facilities for dispatching first responders and
field crews to the outage location for fault investigation, damage assessment, and repairs.
• Meter Data Management System (MDMS). The MDMS is responsible for acquiring and
processing readings from AMI meters. MDMS is primarily intended to support the
revenue billing process. However, MDMS may support a myriad of additional functions
such as theft detection, outage detection (“last gasp” messages), service restoration
verification, and transformer load management (TLM). DMS advanced applications have
many potential uses for AMI data, such as accurate determination of customer loading on
a near-real-time basis. The AMI system may also be used to implement DR actions and
execute other customer load control actions. To date, AMI data resources are, for the
most part, a largely untapped resource for advanced applications beyond revenue billing.
Note that GIS, OMS, and MDMS are just a few of the corporate enterprise systems that are
included in the DMS architecture.
A.1.2 DMS Application Functions
The following DMS application functions are included in this report:
• Data acquisition and control
• State estimation (SE)
• Graphical user interface (GUI)
• Historical information system (HIS)
A-7
• Distribution system model
• Load models
• Topology processor (TP)
• On-line power flow (OLPF)
• Intelligent alarm processing (IAP)
• Tagging, permits, and clearances
• Short-circuit analysis (SCA)
• Switch order management (SOM)
• Volt-VAR optimization (VVO)
• Fault location, isolation, and service restoration (FLISR)
• Predictive fault location (PFL)
• Optimal network reconfiguration (ONR)
• Short-term load forecasting (STLF)
• Dynamic equipment rating
• DMS control of protection settings
• DER management
• Demand response management (DRM)
• Emergency load shedding (ELS)
• Electric vehicle charging
• Asset management (AM)
• Engineering analysis
• Dispatcher training simulator (DTS)
A.1.3 Data Acquisition & Control
The foundation on which DMS is based is the DSCADA system (see Figure A-1). The DSCADA
system provides the “field-facing” interface that enables the DMS to monitor the distribution
field equipment in real-time (measurements made and reported in 1 minute or less on average) or
near-real-time (measurements made and reported every 10 to 15 minutes on average). DSCADA
also enables the DMS to initiate and execute remote control actions for controllable field devices
in response to operator commands or application function control actions. Examples of control
actions include opening/closing a medium voltage line switch, raising/lowering a voltage
regulator tap-position, and switching a capacitor bank on or off.
The DMS should be able to acquire analog inputs (continuously varying signals) and status
inputs (signals that have a limited number of valid states). At a minimum, the following types of
analog input points should be implemented:
A-8
• Voltage magnitude measurements,
• Current magnitude measurements,
• Active power measurements,
• Reactive power measurements, and
• Transformer load tap changer (LTC) position.
The following types of status input points should be implemented (at a minimum):
• Circuit breaker, recloser, and switch status (open or closed), and
• Shunt capacitor switch statuses.
The DMS data may be acquired from a variety of data sources, including (but not limited to):
• Substation SCADA Remote Terminal Units (RTUs). The DMS may acquire information
about substation equipment (e.g., transformers, circuit breakers, and voltage regulators)
via a direct connection to substation RTUs, data concentrators, or equivalent devices.
• SCADA facilities Associated with Field Devices. Some field devices located outside the
substation fence may be equipped with local controllers, RTUs, and/or internal SCADA
communication cards that can support DMS data acquisition functions.
• Distributed Line Sensors. The DMS should be able to acquire real-time information from
stand-alone sensors located out on the distribution circuits. Examples of stand-alone
sensors include FCIs, line post sensors, and bellwether meters.
• AMI Meters. Some DMS information may be acquired from AMI meters installed at
selected field locations (such as the substation end of the feeder) and selected customer
premises.
The DMS should use a report-by-exception philosophy. Only the specified data that have
changed by a stated amount should be transferred at any given time. The DMS should also
include an “integrity check” feature that transfers the entire dataset at specified intervals.
The DMS should be able to control power system apparatus located at distribution substations
and field locations (out on distribution feeders). The controlled power apparatus should include
substation circuit breakers and reclosers, field reclosers, switched capacitor banks, voltage
regulators, and other primary and secondary voltage equipment. The DMS should also be able to
initiate load shedding of selected customers via the AMI system or a separate load management
system.
The degree to which distribution field devices are monitored and controlled by DSCADA varies
widely from utility to utility. Many utilities have implemented DSCADA facilities for their
electric distribution substations. However, DSCADA is often not available at small (single
A-9
transformer, single feeder) substations, especially substations that are very remote and lack
suitable communication facilities.
Far fewer utilities have implemented continuous monitoring and remote control of power
apparatus that is installed out on the feeders themselves (outside the substation fence). The
ability to monitor and control feeder devices such as automated line switches and reclosers,
switched capacitor banks, and voltage regulators, and the ability to continuously monitor stand-
alone distribution sensors (e.g., FCIs, current/voltage sensors) are seen as essential for improving
the overall performance of the distribution system. As a result, a growing number of electric
distribution utilities are currently implementing DSCADA for feeder devices as part of their grid
modernization strategy.
Real-time or near-real-time monitoring and control of distribution assets are essential for
implementing many of the advanced DMS functions, thus DSCADA should be added to most
(if not all) of the distribution substations. Furthermore, monitoring and control of assets located
out on the feeders themselves will be needed by many applications. Phased implementation of
these facilities is recommended because it is not practical to deploy DSCADA at all locations all
at once due to limited technical and financial resources. To maximize payback of the investment,
many electric distribution utilities implement DSCADA facilities on “worst performing” feeders
first (i.e., highest losses, less than average reliability, etc.), followed by the remaining feeders.
The AMI system is also expected to be a key source of near-real-time data, such as voltage
measurements and alarms, which will supply valuable feedback to DMS applications such as
VVO/conservative voltage reduction (CVR). Load measurements will also be needed to build
and maintain load profiles that are used for load allocation and estimation; however, these data
are not required on a near-real-time basis.
Implementing the necessary facilities for data acquisition and control is essential for DMS
implementation success. This will be an important element of the DMS Roadmap.
A.1.4 State Estimation
An accurate insight into the distribution network’s current state under normal and emergency
(outage) conditions is essential for managing the distribution networks. Typical DSCADA
deployments only cover the high-voltage/medium-voltage (HV/MV) substations. As stated in the
previous section of this report, few (if any) measurements are available for out on the feeders
themselves (outside the substation fence). The lack of distribution data is the primary motivation
for the application of distribution SE.
DSE is used for determining approximate values of the loads at all network nodes and
assessment of other state variables, including voltage and current phasors (magnitude and angle)
for all distribution circuit buses, sections, and transformers, active and reactive power losses in
all sections and transformers, and other such electrical quantities.
The load estimation or calibration DMS application function evaluates the symmetrical
(per phase) and asymmetrical (three-phase) load of all nodes in the distribution network that are
A-10
not remotely monitored by the DSCADA system. Then, a standard load flow calculation can be
performed.
DSE is a basic (“enabling”) DMS function, because practically all other DMS analytical
functions require the DSE results to perform their calculations. DSE computes the “unobservable”
load of the actual network, which is not directly covered by the DSCADA system.
The DSE function should use an algorithm specially designed for distribution networks, which
have low redundancy of real-time, remotely monitored data. In addition to the physical and
electrical parameters of network elements, the real-time data required by the DSE function
should include:
• Feeder topology, transformer, and voltage regulator tap changer position,
• Voltage magnitudes at the head end (substation end) of the feeder, and
• Current magnitudes (active and reactive power) at the head end of the feeder and at mid-
line points along the feeder.
Because real-time measurements are not available at all points on the feeder, historical data may
be used to compensate for the lack of real-time data. The historical data consist of:
• Daily load profiles (current magnitudes and power factors, or active and reactive powers)
for all load classes (industrial, commercial, and residential), for all seasons (winter,
spring, summer, and autumn), and for four types of days (weekday, weekend, and
holiday).
• Peak-loads for all distribution transformers and/or consumers (peak-currents and/or peak
power).
The DSE function should be available in both real-time and study mode. In real-time mode, the
function is used to estimate the current state. In the study mode, the function is used to estimate
the desired state (e.g., any state selected from the saved cases).
A.1.5 Graphical User Interface (GUI)
Distribution system operators and other authorized personnel should be able to interact with the
DMS via PC-based workstations installed at the system control centers and various offices.
Figure A-5 depicts typical control center workstations.

A-11
Figure A-5 DMS User Workstation
The DMS user interface should allow authorized personnel to view measured and calculated
real-time, near-real-time, and historical data values to initiate control actions (with suitable
security limits and controls) and to interact with the DMS applications as needed. The DMS
should also include facilities to provide secure, view-only capability to authorized users located
outside the control center.
The DMS user interface should be a workstation-based, full-graphic display product. Full GUI
features should include panning, zooming, and declutter levels to allow the user to control the
viewable area of the “world space” on the display.
The DMS should include areas of responsibility (AORs) that should provide the means to route
alarms, restrict supervisory control, and restrict data entry to those personnel having the
associated responsibility and authority for the respective area. It should be possible to assign
responsibility for portions of the distribution system to individual consoles by pre-defining
groups of AORs and assigning them to different consoles in the control room.
Convenient mechanisms should be provided to enable the user to request specific displays and
navigate between displays. The amount of typing and the number of mouse clicks (e.g., cursor
target selections) needed to request any specific display should be minimized.
The DMS should include a variety of display types to support the visualization requirements of
the DMS applications. At a minimum, the DMS displays should include:
• One-line (“schematic”) diagrams showing the configuration, status, and loading of the
distribution feeders, substations, and other power system facilities.
• Substation one-line (“schematic”) diagrams showing the configuration, status, and
loading of the utility’s internal substation configuration.
• Schematic diagrams for distribution field equipment (outside the substation fence). These
displays should be generated automatically by the DMS on demand using geographically
formatted displays of field information obtained from the GIS.
• Map-style displays showing properly scaled and geographically correct depictions of the
utility’s distribution lines overlaid on street maps. It should be possible to view dynamic
data, such as the open/closed position of each switch, the energization status of each

A-12
device, and the loading of all equipment, on these displays. Figure A-6 contains a
comparison of traditional “schematic” displays with todays “geographically correct” map
style displays.
• Switch-gear one-line (“schematic”) diagrams showing the fusing and switching
configuration, status, and loading of the internal switchgear configuration.
Figure A-6 DMS Graphical Displays
A.1.6 Historical Information System (HIS)
The DMS should include a HIS to store and retrieve system variable values, alarm and event
messages, power system disturbance reports, and other calculated or acquired information. Real-
time information shall be stored in the HIS on a periodic basis at user-specified intervals and also
on an “exception” basis when a variable changes by a user-specified amount since the last time it
was stored. Information associated with events, such as an alarm or power system disturbances,
shall be stored whenever such events occur.
As a minimum, the following types of data shall be stored in the HIS:
• A complete set of all system variables stored at least once per hour and on exception;
• All supervisory and automatic control actions initiated via the DMS;
• All alarm messages and return-to-normal messages;
• Sequence of events logs;
• DMS event messages, such as processor restarts and communication error messages; and
• System journals that record security-related events, including changes in permissions as
defined by the system administrator
Geographically correct map
displays
Schematic One-Line
Displays

A-13
The stored data should be time/date stamped to enable the historical retrieval functions to select
the desired subset of data. Data quality and alarm condition tags should also be stored along with
the value of each system variable.
The DMS should include two storage media for historical data—on-line data storage and off-line
(archive) storage. Data retrieval functions should be capable of accessing the data from on-line
and archive storage. All historical data should initially be stored in on-line storage. Data should
be automatically transferred from on-line storage to archive storage on a periodic basis at a user-
specified interval. It should also be possible to transfer the contents of on-line storage to archive
storage on demand. The DMS should be capable of archiving at least 1 year of HIS data.
The HIS should enable users to access the HIS database via ad hoc queries and to produce
reports using standard relational database management system (RDBMS) report software.
Users should be able to retrieve selected data items for specified time/date intervals and display
the retrieved data in a variety of formats, including tabular reports and trend charts. It should be
possible to perform user-specified calculations on any historical data item that has been retrieved
from the HIS database.
The DMS vendor is often able to furnish its own HIS. However, it is common industry practice
to use a commercially available software package (e.g., OSIsoft PI) for this purpose.
A.1.7 Distribution System Model
Many of the advanced DMS applications require an accurate three-phase electrical model of the
distribution system that represents the exact physical and load characteristics of the distribution
grid. This model allows the DMS to compute electrical conditions at feeder locations that do not
have any instrumentation. The model should encompass the entire distribution system from the
point of connection to the transmission system down to the customer meter (Figure A-7).
Figure A-7 Distribution System Model
A-14
The distribution system model must accurately represent the unbalanced characteristic of electric
distribution systems (i.e., different impedance, load, and generation on each phase of the three-
phase distribution system). This model also must enable analysis of radial (single source) and
networked (multi-source) distribution systems.
Several variations of the model are needed:
• An as-built model that represents the normal configuration of the system;
• An as-operated model that represents the current configuration of the system, including
any temporary modifications (e.g., temporary switching, cuts, and jumpers); and
• An as-planned version of the model to ensure that planned facilities are quickly added to
the model when the utility company energizes these devices.
The DMS should include facilities for seamlessly importing this model from corporate GIS data.
The incremental update process to bring model changes into the DMS should be handled via
electronic transfers with no manual copying and hand-drawn updates. In addition, the model
changes should be brought into the DMS with no downtime for the system in a manner that is
transparent to the distribution system operator.
The DMS should include a detailed, up-to-date electrical and connectivity model of the electric
distribution system as required by the DMS applications. There should be only one DMS model
of the system used by all DMS advanced applications, such as OLPF and short-circuit analysis
(SCA).
The DMS distribution system model should represent the entire distribution network that
includes distribution feeders and distribution substation devices from the high-voltage side of the
substation transformer (including the high side circuit breaker) down to the low-voltage
(secondary) side of the distribution service transformers. The DMS distribution system model
should be a three-phase model that fully represents the unbalanced nature of the distribution
system. The electrical model should include the entire distribution primary circuit, including
main line portions of the circuit, feeder laterals, and underground loops that are tapped off the
main trunk of the feeder. The distribution system model should accommodate three phase
portions of the feeder as well as single-phase and two-phase line segments and laterals.
The distribution model should include the “physical” characteristics of the circuit and the loading
characteristics, as described below. The DMS shall provide proper handling of “underbuilds”
identified by GIS. Underbuilds occur when:
• Distribution lines are on the same poles as transmission wires (which are not modeled in
the same distribution GIS database), and
• Two or more distribution primary lines are on the same pole (parallel circuits).
While most feeders are radial in nature (i.e., there is one and only one path leading from a single
feeder source to any point on the feeder), the DMS distribution system model and associated
A-15
application software shall be able to handle looped and weakly meshed feeder configurations,
circuits operating in parallel, as well as secondary networks.
Some electric distribution utilities have considered modelling the secondary portion of the
distribution circuit between the distribution transformer and the customer meter. By explicitly
modeling the secondary (120/240 V) circuits, the electric utility is able to accurately determine
the voltage drop from the load side of the distribution transformer to the load. Some DMS
vendors estimate the voltage drop based on the estimated loading of the distribution transformer
and then look up the voltage drop using an optional pre-defined schedule (for each load
category). For example, if the distribution transformer is currently loaded to 80% and a voltage
drop schedule has been provided, the voltage drop schedule may indicate that the voltage at the
customer service entrance (load) is 1.5% lower than the OLPF-solved transformer secondary
voltage. The ability to calculate voltage down to the meter/service entrance of the customer is
most important with respect to not over-stepping VVO voltage reduction for demand
minimization or CVR.
The transmission or subtransmission source(s) at each distribution substation may be represented
by an infinite bus with dynamic source voltage angle and magnitude supplied by the EMS state
estimator function used by the transmission operator. The equivalent impedance of the external
network, as seen from the high-voltage buses of distribution substation buses, should be provided.
Note that the equivalent impedance of the transmission grid is not a fixed number; it varies with
generating unit commitment and status of key transmission system components. Therefore, in
order to obtain accurate SCA results (required for predictive fault location [PFL]), the equivalent
impedance of the external network must be dynamically updated as system conditions vary.
Generators such as co–generators, non–utility generators (NUGs), independent power producers
(IPPs), and other similar units should be modeled. Generators should be designated as either
constant real power/constant voltage units (PV units) or constant real power/constant power
factor units (PQ units). Generator active and reactive power limits should be modeled by
generator capability curve. In addition to synchronous reactance, the generator model should also
include sub-transient and transient reactances required for SCA.
To the fullest extent possible, the distribution system model should be created and maintained
with little or no manual intervention. The primary source of field (outside the fence) information
for the model should be the GIS. The sources of information for the distribution substation
portion of the distribution system model may include other non-GIS sources. Manual entry may
be needed to build the necessary substation models if this information is not available via an
accessible electronic mechanism.
The GIS should provide some basic “physical” information about each circuit, such as wire size
and type, arrangement of conductors, height of conductors above ground, and section length. The
DMS, in turn, should calculate resistance and reactance (including all significant mutual
impedances) from these basic physical parameters. The GIS should also provide information
about the sizing and physical characteristics of other field components such as line capacitor
banks, voltage regulators, and distribution service transformers. Underground cables should be
A-16
modeled to include the cable impedance as well as charging admittance. The position of the
individual cable in the ducts and manholes should be provided from the GIS.
The DMS should support incremental model changes. That is, when a small permanent change to
the distribution system occurs, it should be possible to update only those portions of the
distribution system model that are affected by the change. It should not be necessary to rebuild
the entire model for each change in equipment and configuration. The DMS should be able to
perform incremental builds on a per-feeder basis.
The DMS should provide a convenient mechanism for installing temporary changes to the
electrical model. It should be possible to change the open/closed position of a switch whose
status is not automatically telemetered (“pseudo” point). In addition, the DMS should support the
addition of temporary cuts and jumpers (including jumpers between individual phases; must be
able to temporarily jumper between conductors that are normally connected to different phases).
The DMS should allow an operator to change the network model to show a feeder being cut,
grounded, or attached (jumpered) to another feeder or phase.
When the repair is completed, it should be possible to back the change out and return the
network model to its original state. All such changes should be automatically reflected in the
DMS model. The DMS should provide information about all such temporary changes to the
utility’s OMS.
A.1.7.1 Modeling the Transmission System
A portion of the transmission grid that supplies each substation may also be modeled, especially
if the utility company that owns and operates the substation and distribution resources also owns
and operates the supply lines. However, in most case, the transmission grid is not modelled to
any great extent.
Typically, the transmission grid is modeled with an impedance that represents the Thevenin
equivalent of the transmission grid, including all generators that are currently connected to the
grid and running. The accuracy of the transmission equivalent impedance is very important
because it is needed to compute the short circuit current for faults that occur on the distribution
system. Short circuit current is (in turn) used by the PFL application that runs in the DMS.
The equivalent impedance is not a fixed value; it is different for every point of connection to the
transmission system. The transmission system equivalent impedance at any point of connection
may vary with time as central generators are committed and decommitted. When a large central
generator is taken off line, the equivalent impedance will increase because the short circuit
contribution of that large generator is removed and as major transmission line switching occurs.
The distribution system model shall include an equivalent impedance for each transmission point
of connection that is obtained from the transmission operator. The equivalent impedance values
must be dynamically updated to reflect changes in major generator status and transmission line
status.
A-17
A.1.7.2 Modeling the Substations
The electrical characteristics of each substation component and the connections between
components must be accurately represented in the electric distribution model. Substation assets
are usually not in the electric utility’s GIS. Therefore, the substation models required by DMS
must be obtained from a different source, such as the electric utility’s EMS, or must be built
from scratch using the DMS vendor’s model-building software. Fortunately, changes to
substation assets are much less frequent than distribution feeder changes, so it is usually practical
to manually build and maintain the substation models.
A.1.7.3 Modeling the Distribution Secondary Circuits
Most electric distribution companies elect not to model the secondary portion of their electric
distribution feeders from the low side of the distribution service transformer down to the
customer meters. This practice is mostly due to the lack of accurate information about this
portion of the circuit.
Despite the lack of an accurate model of the secondary portion of the circuit, analysis of the
secondary circuit is important, especially for utilities that are planning to implement CVR. To
gain the maximum possible CVR benefit without causing low-voltage violations for any
customer, it is necessary to determine the service delivery voltage at each meter. Ideally, voltage
feedback would be provided in the form of instantaneous voltage measurement provided by
smart meters. However, it is not practical to obtain near-real-time voltage measurements from
every meter due to the enormous burden this would place on the AMI meters and associated
communication infrastructure.
It is possible to obtain near-real-time measurements from a subset of meters that are located at
sites that are likely to have the lowest voltage on the feeder. These locations include feeder
extremities that are farthest from the substation, end points of heavily loaded branches, and the
source side of midline voltage regulators. However, research has shown that the lowest voltage
along a feeder varies widely with time, and that the number of meters that have the lowest
voltage on the feeder at least one time during the course of the year numbers in the hundreds.
While the number of metered points is less than monitoring all meters in near real time, this
approach will still place an enormous burden on the AMI meters and associated communication
infrastructure. Furthermore, if the feeder is reconfigured for any reason, hundreds of different
metered locations may suddenly become candidates for the lowest voltage on the feeder.
Without an accurate measurement or calculation of the lowest feeder voltage at any time, the
utility company will need to provide more operating margin to ensure that the voltage does not
go below the minimum at any location on the feeder. From the standpoint of CVR, this will limit
the amount of voltage reduction that can be performed, and therefore reduce the maximum
possible savings.
Many electric utilities have elected to approximate the voltage drop between the modeled portion
of the distribution feeder and the customer meter. The simplest approach is to assume a default
voltage drop on the secondary circuit. But the assumed value of voltage drop can be very
approximate, because this voltage drop may vary between 2 and 6 V (on a 120-V basis). So once
A-18
again, the method is not that accurate and, accordingly, a bigger operating margin must be used
to prevent violating the minimum voltage level.
A refinement of this approach is to estimate the voltage drop based on the OLPF-calculated
loading of the distribution transformer and then look up the voltage drop using a pre-defined
voltage drop schedule (for each load category). For example, if the distribution transformer is
currently loaded to 80% and a voltage drop schedule has been provided, the voltage drop
schedule may indicate that the voltage at the customer service entrance (load) is 1.5% lower than
the OLPF-solved transformer secondary voltage. This approach improves the voltage drop
calculation but is still only an approximation that requires a bigger operating margin.
Since it is not practical to measure and report instantaneous voltage at every smart meter, the
next best accuracy can be obtained by modeling the secondary portion of the distribution circuit
from the low side of the distribution service transformer down to each customer meter. By
explicitly modeling the distribution circuits, the voltage drop from the load side of the
distribution transformer to the load is more accurate, and the operating margin on voltage
reduction can be smaller resulting in more voltage reduction benefits.
Calculation of voltages on the secondary circuit will provide a clear view of effects on any Volt
or volt/VAR control. The secondary circuit model will enable the utility to analyze the effects of
performing load control applications through AMI, such as turn on/off air-conditioners, water
heaters, and pool pumps.
Modeling the secondary portion of the distribution feeder can significantly improve possibilities
for more accurate fault location following trouble calls. The benefit in this case would be
reduction in fault investigation time which, in turn, translates to reliability improvement and
labor savings.
Another possible benefit of modeling the secondary circuit is the analysis of the effects of
rooftop solar on power flow and secondary circuit voltage. While many utilities do not expect a
high penetration of DG on their distribution feeders in the near future, it is possible to have
clusters of DG units in certain areas that can produce unacceptable electrical effects.
Modeling the secondary circuit will also provide more accurate calculation of electrical losses.
This information can be used to target worst-performing feeders for circuit improvements. More
accurate loss calculations can also help identify feeders where a significant amount of electricity
theft is occurring.
At a minimum, the utility company should model the secondary circuit in areas where high
penetrations of rooftop solar are expected, and also in areas where high deployment of EV
charging vehicles are expected.
A.1.7.4 Load Models
The DMS should include a mechanism to estimate the load on each distribution service
transformer at a particular point in time. The Load Allocation and the Load Estimation functions

A-19
should provide the best estimate of kW and kVAR levels to the OPLF program. It should be
possible to use the Load Allocation and the Load Estimation function in both real-time and study
mode.
The DMS load allocation function should support the use of historical load curves (“load
profiles”) that represent the characteristics of load types served by the utility. The load profile for
each load type should include the percentage of peak load at 15-minute intervals throughout the
day plus a peak-load value for this customer type. Figure A-8 shows a representative load profile.
To calculate the estimated load at any time of day, the percentage of peak-load at that time of
day taken from the load profile is multiplied times the peak-load.
For the sample load profile shown in Figure A-8, to determine the load at 10 a.m., the percentage
of peak-load at that time (0.650) should be multiplied times the peak-load for the day (1.753 kW)
to determine an estimated load of 1.14 kW.
Figure A-8 Representative Load Profile
Load types supported by the DMS should include different “conforming” loads (i.e., loads with a
profile that matches the utility’s load survey data) and “non-conforming” loads (i.e., loads with a
unique profile that is significantly different than the utility’s “standard” load profiles).
Conforming load classes should include numerous load types that go well beyond the basic
residential, commercial, and industrial load types. For example, supported load types may
include:
• Agriculture – Commercial
• Agriculture – Residential
• Mining
Hour
of
Day
Fraction
of peak
load
Peak Load
1.753
kW
0
0.549
1 0.487
2
0.455
3 0.427
4 0.405
5 0.394
6 0.429
7 0.523
8
0.561
9 0.590
10
0.650
11
0.729
12
0.807
13
0.826
14 0.886
15
0.930
16 0.983
17 1.000
18 0.995
19 0.938
20 0.921
21 0.871
22 0.784
23 0.714
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900
1.000
0 5 10 15 20
Fraction of peak load
Representative Load Profile
A-20
• Educational Service
• Residential – High-Rise Apartment Common (electric heat)
• Residential – High-Rise Apartment Common (non-electric heat)
• Residential – High-Rise Apartment Suites (electric heat)
• Residential – High-Rise Apartment Suites (non-electric heat)
Load profiles should consist of a pair of real power and power factor (or reactive power) for each
load interval (15 minutes). Load interval size should be configurable (e.g., 5, 15, or 30 minutes).
The DMS should interpolate between load survey points to determine load values at intermediate
points between points on the curves. For example, with hourly load survey data, half hourly data
points should be the average of the two adjacent hourly points. The DMS should include a
different set of load profiles for each season (winter, spring, summer, and fall) and for different
types of days (weekday, weekend, and holiday). The number of seasons and day types should be
configurable to satisfy the utility’s specific needs.
Traditionally, load profiles have been built by performing statistical load surveys for each rate
class, and these load profiles remain fixed until the next load survey. Utilities that have
implemented AMI should use actual billing data from AMI meters to construct load profiles that
will be considerably more accurate than the traditional load profiles. The DMS should update its
load profiles on a monthly basis or more often using AMI data.
The DMS should be capable of using actual near-real-time distribution transformer loading
measurements acquired from an AMI system or a TLM system in place of allocated values.
The power flow algorithm should treat each load value as voltage dependent. Active and reactive
loads should be determined as a function of voltage at the bus where the load is connected. A
polynomial representation, which is a combination of constant power, constant current, and
impedance characteristics, should be used to compute the voltage-adjusted load.
The load estimation application should determine the best estimate of each distribution
transformer load (kW and kVAR) based on the available real-time measurements, load profiles,
and real-time network topology. Load estimation should use the accuracy class information
assigned to each real-time measurement to discriminate between measurements based on the
measurements’ errors. Thus, load estimation should match more closely the measurements which
are more accurate (smaller errors assigned) then those measurements which are deemed less
accurate (i.e., have larger errors defined in the assigned accuracy class) while determining kW
and kVAR values of each load. Load estimation should also perform measurement consistency
checks and validation by fully exploring measurements redundancy wherever available in order
to identify potentially bad measurements.
A.1.7.5 Electronic Map/Model Updates
Having an up-to-date “as operated” representation (maps and models) of the electric distribution
system at all times is essential for safe and efficient operation of the electric distribution system.
At many electric utilities, a considerable amount of manual effort is needed to update the existing
records. Thus there is a significant amount of delay in updating the maps, displays, and other

A-21
records used by operating personnel. Hand-drawn markups (see Figure A-9) are often used as the
main source of information until the official map updating is done.
Some changes to the electric distribution system are only made in a single system (e.g., the OMS)
and are, therefore, not available to other applications. This will become even more of a problem
as the DMS is introduced due to the number of model-driven applications that are contained in
the DMS.
The DMS must include suitable mechanisms to streamline the records update process by
eliminating manual copying between systems and hand-drawn updates to maps. The one
distribution system model should be accessible by all computing systems that require this
information (i.e., should not have to duplicate information on multiple systems).
Figure A-9 Hand-Drawn Map Update (Red lines)
A.1.8 Topology Processor
The DMS shall include a topology processor (TP) for performing various analyses of the
distribution network configuration. The DMS TP function shall maintain static and dynamic
connectivity models. Static connectivity shall define relationships such as static node-device
relationship and organizational entities groupings. Dynamic connectivity shall account for switch
statuses, device energization statuses, and loops. The DMS TP function shall be able to:
• Locate an element of the distribution network (e.g., transformer, section) by name or ID,
• Locate and mark supply paths of network elements,
• Determine and highlight the energization status of network elements,
• Locate and highlight networks loops,
• Locate and highlight all network elements downstream of a selected element,
• Locate and highlight neighboring feeders of a selected feeder that can serve as an
alternate supply for the feeder,
• Color individual feeders,

A-22
• Color by voltage level,
• Color line segments with voltage magnitudes less than specified thresholds,
• Color line segments with loading greater than specified thresholds, and
• Locate and highlight portions of the distribution feeder that are isolated from the utility’s
power grid and are being energized by IPPs and other distributed generating resources.
Figure A-10 shows a network of feeders with each individual feeder drawn with a different color
by the TP.
Figure A-10 Colorization of Individual Feeders by the Topology Processor
For the TP to work correctly, it is essential to have accurate phasing information in the
connectivity model used by this application. At many electric utilities, existing distribution
models often contain many phasing errors (e.g., transformers connected to the wrong phase,
single-phase laterals modelled incorrectly) that must be corrected before this information can be
effectively used by the TP. Some electric utilities have been able to identify many of these errors
by lowering the voltage using single-phase voltage regulators and observing the corresponding
voltage reduction on single-phase meters connected to the associated feeder. However, if the
voltage regulation strategy for the feeder in question includes three-phase regulators or a
substation LTC, this approach is not possible. Often, this problem can only be corrected via field
inspections. Once all phasing errors have been corrected, business processes must be put in place
to ensure that new phasing errors are not introduced during future line work (especially during
reconstruction following storm damage).
A.1.9 On-Line Power Flow
The DMS should include an OLPF program that is able to determine the electrical conditions on
the utility’s distribution feeders in near-real time. The OLPF should provide the control center
personnel with calculated current and voltage values in place of actual measurements and should
alert the operators to abnormal conditions out on the feeders, such as low voltage at the feeder
extremities and overloaded line sections. In addition, other DMS application functions, such as
SOM, VVO, and FLISR, should be able to use the OLPF results to accomplish their specified
functionality.
A-23
The OLPF should use the distribution system model and load estimate provided by load
allocation and estimation functions in its calculations. The OLPF should also use the available
real-time statuses from the substation and feeder devices. The OLPF should use voltages and
phase angles obtained from the EMS state estimator used by the transmission operator at the
injection points (usually placed on a high-voltage transformer bus in distribution substations).
The OLPF program should calculate current and voltage magnitudes and phase angles as well as
real and reactive power flows and injections for the entire distribution system and should present
the results in various formats automatically and on demand. Convenient mechanisms should be
provided for viewing power flow summaries for a large area of the distribution system. It should
also be possible to view (on demand) the power flow results for a single point or section of the
power distribution system.
The OLPF should calculate all technical electrical losses (load and no-load losses), and real and
reactive power flows and consumption in the distribution system.
The OLPF should be designed specifically for electric distribution systems. It should provide a
full three-phase unbalanced calculation, accommodating single-phase, two-phase, and three-
phase circuits and loads (balanced and unbalanced). The OLPF solution method should be able
to handle both radial and weakly meshed configurations and the wide range of X/R ratios
encountered on distribution networks where mixtures of overhead lines and underground cables
are commonplace.
Convenient mechanisms should be provided for viewing the OLPF results in schematic and
geographic displays. As a minimum, the following display mechanisms should be provided for
viewing OLPF results:
• Automatically highlight sections of the feeder that are overloaded or experiencing
under/over voltage conditions using color coding (e.g., sections of the feeder that are
overloaded are color-coded red) or an equivalent highlighting technique.
• Positioning the cursor on any feeder section (“mouse over”) should result in the display
of current flow and phase-neutral voltage at that point on the feeder.
Figure A-11 illustrates how voltage violations identified by the OLPF can be shown on a feeder
map display. Areas where voltage violations exist are highlighted with a violet “halo.”
A.1.10 Intelligent Alarm Processing
The DMS should include an intelligent alarm processing (IAP) function to alert system operators
to abnormal conditions on the power system. The IAP function should also alert system users to
DMS and communication equipment failures and other abnormal DMS conditions requiring
attention. The DMS should include a variety of distinct alarm priorities that determine the
manner and priority in which each alarm is announced, acknowledged, and recorded.

A-24
The IAP function should assist the operator in managing “bursts” of alarms that may occur
during an emergency, or combinations of alarms related to a single event. At a minimum, IAP
should include:
Figure A-11 Voltage Violation Highlighting
• Dependent alarms for which alarming of specified points should be enabled or disabled
based on the status or values of another related data point.
• Preventing repetitive alarms for the same alarm condition.
• Combining related alarm messages (e.g., a single alarm message “feeder ABC tripped”
may be provided rather than multiple messages that convey the same information
(breaker tripped, loss of voltage, loss of current).
• Prioritizing alarm messages and highlighting the most urgent messages.
• Combining the alarm states of two or more alarms to produce a higher priority alarm
message. For example, the DMS should be able to generate a single major alarm if two or
more specified minor alarms exist at the same time.
• Suppressing alarms based on related conditions (i.e., suppressing or enabling the alarm
based on the value or state of another system variable). For example: if equipment
associated with a voltage measurement is de-energized and that voltage value is
approximately 0.0 kV, the DMS should consider that to be normal and should not raise
any alarm. If the same equipment is energized and that voltage value is approximately
A-25
0.0 kV, the DMS should produce an alarm to indicate the possibility of an instrument
transformer failure.
The IAP function should include “time-sensitive alarming.” The DMS should monitor and track
time-sensitive ratings on substation transformers, cables, and other equipment time-sensitive
ratings. The time-sensitive alarm function should track the amount of time the short-term (e.g., 4-
hour) emergency loading on a substation transformer or cable has been exceeded and should alert
the operator when the time limits are being approached. For example, if a substation transformer
has exceeded its 4-hour emergency rating for a user-specified period (e.g., 3.5 hours), the system
operator should be alerted.
A.1.11 Tagging, Permits, and Clearances
Maintaining the safety of the electric utility workforce and the general public is a fundamental
and essential business objective that applies to all electric distribution utilities. The DMS should
strictly enforce safety rules (e.g., tagging, permits, and clearances), improve operator awareness
and facilitate rapid detection of potential safety hazards, provide mechanisms to enable rapid
detection of potential safety rule violations, and provide mechanisms such as remote monitoring
and control to perform some hazardous operations from a safe distance. The DMS should
manage the business processes for issuing, tracking, and enforcing all safety tags, permits, and
clearances in accordance with established safety procedures and will help to ensure that all users
and systems are aware of all such operating restrictions.
The DMS shall use tagging to call the system operator’s attention to exception conditions for
field devices and to inhibit supervisory control actions. As such, special precautions shall be
taken to ensure that no supervisory control action can be performed using a control inhibited
device. In addition, special precautions shall be taken to ensure that tags are not lost during
system failover or switchover, even when these events occur simultaneously with tag application
or removal. The tag application shall only be confirmed to the user applying the tag after it has
been committed to the standby processor of the active control system.
A.1.12 Short-Circuit Analysis
The DMS should include a SCA function to enable users to calculate the three-phase voltages
and currents on the distribution system due to postulated fault conditions with due consideration
of pre-fault loading conditions. The SCA function should be able to calculate and compare fault
currents against switchgear current-breaking capabilities and device fault-current limits. The
SCA function should also enable users to identify estimated fault location using measured fault
magnitude, pre-fault loading, and other information available at the time of the fault.
The results of SCA should be used for other applications like PFL, which uses the SCA results to
identify fault locations that could produce the fault current magnitude measured by protective
relay IEDs during a fault.

A-26
A.1.13 Switch Order Management
The DMS should include a SOM function to assist system operators in preparing and executing
switching procedures for various elements of the power system, including both substation and
field devices (outside the substation fence). The DMS SOM function should assist the user in
generating switching orders that comply with applicable safety policies and work practices.
Figure A-12 shows an example of a paper switching order—the DMS should include an
electronic version of this switching order. The SOM function should support the creation,
execution, display, modification, maintenance, and printing of switching orders containing lists
of actions that are needed to perform the switching, such as opening/closing various types of
switches, implementing cuts and jumpers, blocking, grounding, and tagging.
A valuable feature that should be included in the DMS to support creation of switching orders is
the ability to view a portion of the feeder being worked on in either geographic form or
schematic form. Figure A-13 shows a geographically correct display alongside a schematic view
of the same distribution feeder. The system should be able to create a schematic view
automatically from the geographic view—it should not be necessary to build a separate
schematic view of a feeder manually.
Figure A-12 Switching Orders

A-27
Figure A-13 Geographic versus Schematic View
In addition to the computer-assisted switch order generation facility described above, the DMS
should be able to automatically generate switching orders. With this auto-generate feature, the
dispatcher should select the power system device or portion of the system (“large area
restoration”) to be isolated and worked on. Figure A-14 shows a typical DMS display screen that
is used to select the area for which a switching order is needed.
Figure A-14 Selecting an Area for Automatic Switch Order Creation
It should be possible to execute defined switching orders in real-time and in study mode. Real-
time execution should be provided for switching orders that involve supervisory control
commands. Study-mode execution should allow the dispatcher to check out the switching order's
potential impact on the power system, including possible current and voltage violations, at a
specified time and date using the DMS OLPF program prior to actual execution. The DMS
should alert the dispatcher if any violations are detected during study-mode execution of the
switching order.
Schematic View
A-28
A.1.14 Volt-VAR Optimization
The DMS should include a VVO function that should automatically determine optimal control
actions for voltage and VAR control devices (e.g., substation LTC, midline voltage regulator,
and switched capacitor banks) to achieve specified volt/VAR “operating objectives” while
maintaining acceptable voltage and loading at all feeder locations. In addition to the basic
voltage and loading constraints, the VVO function should not violate other constraints
established by the utility, such as daily limits on the number of voltage regulator and capacitor
bank operations.
The VVO application should include a set of displays for managing the operation of VVO,
viewing VVO results, and viewing a tabulation of estimated benefits. Figure A-15 depicts a
representative DMS model-driven VVO solution.
VVO should include the following utility-selectable operating objectives:
• Reduce electric demand,
• Reduce energy consumption,
• Improve feeder voltage profile,
• Maximize revenue,
• Energy loss minimization/power factor improvement, and
• Weighted combination of the above.

A-29
Figure A-15 VVO DMS-Based Model-Driven Solution
The VVO function should operate either in closed-loop or advisory (open-loop) mode. In
advisory mode, the VVO function should generate advisory control actions that may then be
implemented by the dispatcher. In closed-loop mode, the VVO program should automatically
execute the optimal control actions without operator verification. The VVO application function
should be executed periodically at a user-adjustable interval, upon occurrence of a specified
event (e.g., significant change in the distribution system such as significant load transfer,
topology change) or when requested by the user (on demand).
The DMS should obtain near-real-time voltage measurements from a small number (between
10 and 20) of AMI meters. These voltage measurements should be continuously monitored by
the DMS to verify that voltage constraints are not violated at these locations and to determine
whether a feeder outage has occurred.
The VVO function should have a “failsafe” design. That is, no control action that would produce
unacceptable voltage or loading conditions should be requested by the DMS as a result of the
failure of any DMS component or any other reason. IEDs used on feeder devices should possess
a “heart beat” function to detect loss of communication with the master station within 10 minutes.
This time period should be programmable. The VVO application should periodically check that
the feeder IEDs are under VVO monitoring using the “heart beat” functionality of the controller.
If the local controller fails to communicate with the VVO central processor for a specified time
period, the controller should revert to local (standalone) control. When a VVO component is out
A-30
of service for any reason (e.g., controller failure, loss of communications, controller manually
bypassed, or blown capacitor fuse), the DMS should continue to operate in these abnormal
situations, if possible, without producing unacceptable voltage and loading conditions, using the
remaining DMS components.
A.1.15 Fault Location, Isolation, and Service Restoration
The DMS should include a FLISR function that should be used to reduce outage duration
(i.e., improve the System Average Interruption Duration Index (SAIDI]). FLISR may also
improve the System Average Interruption Frequency Index (SAIFI) because some customers will
be restored to service in less time than the threshold for permanent outages (usually 1 minute).
FLISR should provide SAIDI improvement benefits for a wide variety of feeder configurations
with various levels of protection and automation, ranging from feeders in which the substation
circuit breaker is the only controllable device and source of information, to feeders that are
equipped with automated line switches, tie switches, fault detectors, and other facilities for
monitoring and control.
The FLISR main logic should:
• Automatically detect faults,
• Automatically determine the approximate location of the fault (i.e., the faulted section of
the feeder that is bounded by two or more feeder switches),
• Automatically isolate the faulted section of the feeder, and
• Automatically restore service to as many customers as possible in less than 1 minute
following the initial circuit breaker or recloser tripping.
The DMS should analyze all available real-time information acquired from field devices,
including fault detector outputs, fault magnitude at various locations on the feeder, feeder
segment and customer meter energization status, and protective relay targets, to detect faults and
other circuit conditions for which service restoration actions are required. All control actions
identified by centralized FLISR should be executed by issuing supervisory control commands to
substation circuit breakers and reclosers and various feeder switching devices (reclosers, load
breaker switches, and sectionalizers that are equipped with supervisory control capabilities).
The DMS FLISR function shall only operate for permanent faults occurring out on the main
three-phase portion of the feeder and for substation faults that cause the sustained loss of one or
more feeders at the substation. Temporary faults that are cleared without sustained loss of service
by standard automatic reclosing schemes shall not result in FLISR control actions being executed.
The FLISR function shall not attempt to perform control actions to restore service loss resulting
from blown fuses on feeder laterals, emergency load shedding activities, and manual feeder
tripping.
Before executing any downstream service restoration actions, the DMS shall confirm that the
alternative source is energized (available) and is able to accommodate the additional load being
switched. Service restoration actions performed or recommended by the DMS shall not produce
undesirable electrical conditions, such as low voltage or equipment overloads, on any of the
A-31
utility’s feeders. The DMS shall analyze pre-fault loading on the faulted feeder and available
capacity on the alternative source feeders to determine whether such undesirable electrical
conditions would occur on the backup feeder if proposed switching actions are performed. The
available capacity on alternative source feeders shall be determined by comparing the pre-fault
loading on the alternative source feeder with the feeder rating.
The DMS shall consider all possible ways to restore as much of the load as possible without
creating such undesirable conditions. The preferred service restoration strategy shall be the
switching strategy that:
1. Does not cause undesirable electrical conditions on any distribution feeder,
2. Restores electrical service to the maximum number of customers, and
3. Requires the fewest number of switching actions.
If any portion of the interrupted load cannot be restored by the DMS due to loading or other
undesirable electrical effects, the DMS shall inform the operator of this condition via an
alarm/event message.
A.1.16 Predictive Fault Location
When a short circuit occurs on the distribution feeder, modern protective relay IEDs are able to
capture the fault current magnitude and the voltage magnitude at the time of the fault. Dividing
the voltage magnitude by the current magnitude at the time of the fault yields the impedance to
the fault (in ohms) seen by the relay. Dividing the impedance to fault seen by the relay by the
conductor ohms-per-mile yields the approximate distance in miles from the distribution
substation to the fault. While electric distribution utilities have had some success in using this
approach, distance-to-fault supplied by the protective relay IED has several limitations that
usually decrease the overall accuracy of the approach:
• The relay usually assumes a homogeneous wire size/arrangement. If the wire or cable
size is not uniform across the feeder, the calculations will be inaccurate.
• The fault impedance is unknown. Fault impedance increases the apparent distance to the
fault, so if not properly accounted for, the results will be inaccurate. This is less of a
problem for underground feeders, because fault impedance is often negligible for
underground cable circuits. On overhead lines, it is a common approach to determine the
reactive ohms distance to fault because fault impedance tends to be resistive in nature.
Alternatively, default fault impedance may be assumed.
• The protective relay IED does not account for fault current in-feed from distributed
generating units. Failure to account for DG will result in a predicted fault location that is
farther downstream than the actual fault location.
The DMS should include a PFL application that uses SCA and the as-operated short circuit
model of the electric distribution system to determine feeder locations where a fault would
produce the current magnitude observed at the head end of the feeder by protective relay IEDs.
The distance-to-fault software repeatedly executes the SCA program with simulated faults at all
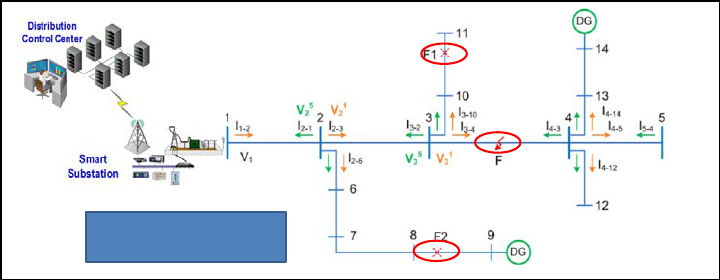
A-32
plausible fault locations for the given fault current. Fault locations that result in fault current that
matches the measured fault current are “candidate” fault locations.
This approach has several advantages compared with the protective relay distance-to-fault
information:
• It is not necessary to assume homogeneous conductor sizing, because the calculations use
an as-operated short circuit model of the electric distribution. As a result, the conversion
of fault impedance to actual distance is far more accurate than the relay IED approach.
• It is possible to account for the short circuit in-feed from distributed generating units if
these units are properly modeled in the as-operated short circuit model of the electric
distribution system. The short circuit calculations used in this method will properly
account for the short circuit contributions of DG units.
The effects of fault impedance are handled in a similar manner to the protective relay IED
(e.g., use default value for fault impedance, use short circuit reactance to determine distance to
fault).
PFL may identify multiple candidate fault locations on branched (bifurcated) feeders
(see Figure A-16). The electric utility should be able to narrow down the possible fault locations
by combining distance-to-fault data with OMS fault interrupting device predictions and AMI
voltage measurements at the time of the fault.
Figure A-16 Predictive Fault Location
A.1.17 Optimal Network Reconfiguration
The DMS should include an optimal network reconfiguration (ONR) function that should
identify ways in which the utility can reconfigure a user-selected interconnected set of
distribution feeders to accomplish a user-specified objective function without violating any
loading or voltage constraints on the feeder. At a minimum, the DMS ONR function should
enable the user to achieve the following objective functions:
For branched feeders, method
identifies multiple candidate fault
locations
A-33
• Minimize total electrical losses on the selected group of feeders over a specified time
period,
• Minimize the largest peak demand among the selected group of feeders over a specified
time period,
• Balance the load between the selected group of feeders (i.e., transfer load from heavily
loaded feeders to lightly loaded feeders), or
• A combination of the first three objectives with a weighting factor for each objective
function.
The ONR function output should include a list of recommended switching actions and a
switching plan to accomplish these actions along with a summary of the expected benefits
(e.g., amount of loss reduction).
A.1.18 Short-Term Load Forecasting
The DMS should include a short-term load forecast (STLF) function that should use historical
load and weather data to forecast the system load automatically every hour, for a 168-hour
(7-day) rolling period. The STLF results should be available for viewing and outage planning
and should also be used by other DMS application functions that require an estimate of expected
peak loading in the near term, such as FLISR, SOM, and ONR.
STLF should use both a weather-adaptive and a similar-day forecast methodology to obtain the
most accurate prediction. It should be possible to assign weighting factors to the results of each
methodology to obtain a weighted average forecast. The load forecast should be based on
historical load measurements or, in the future, actual meter readings obtained from AMI for the
specified feeder on a “similar day” during the most recent past years. At a minimum, “similar”
days should be selected based on day of week (weekday, weekend, and holiday) and month or
season.
A.1.19 Dynamic Equipment Rating
The DMS should include a dynamic equipment rating function that should calculate thermal
ratings (real-time ampacities) of substation transformers and distribution feeders (underground
cables and overhead lines) on a real-time basis. The objective of this function should be to
calculate variable ratings based on actual loading and ambient conditions rather than worst-case
weather and load assumptions.
Substation transformer ratings should be based on:
• Recent loading history,
• Internal temperature measurements (e.g., top oil, bottom oil, and hot spot temperatures
for substation transformers),
• Status of forced cooling systems (e.g., pumps and fans on substation transformers),
A-34
• Ambient temperature, and
• Season.
Underground cable ratings should be based on duct temperature measurements (where available),
position in the duct bank.
A.1.20 DMS Control of Protection Settings (Adaptive Protection)
The DMS should include application functions to assist the operators in switching between pre-
established setting groups that are installed in the utility’s protective relays and reclosers when
the need arises. Several potential uses of this application are summarized below:
• Fuse Saving Enable/Disable: Circuit breaker reclosing relays and line reclosers used by
many electric utilities include user-selectable setting groups for “fuse saving” and “fuse
blowing.” The DMS should include a function that enables the user to switch between the
“fuse saving” setting group and the “fuse blowing” setting group for user-selected circuit
breaker reclosing relays located in substations and reclosers located in substations and out
on the distribution feeders.
• Cold Load Pickup Enable/Disable: Circuit breaker protective relays and reclosers may
include user-selectable setting groups for handling normal service restoration and “cold
load” pickup. Cold load pickup settings include additional time delays and higher pickup
settings to prevent re-tripping when re-energizing the feeder or portion of the feeder
following a lengthy (sustained) outage. The DMS should include a function to enable the
user to switch between the normal setting group and the “cold load pickup” setting group
for user-selected circuit breaker protective relays and reclosers located in substations and
reclosers located out on the distribution feeders.
A.1.21 Distributed Energy Resource Management
As the penetration level of DER (distributed generators, energy storage devices, and controllable
loads) continues to grow on the electric distribution system, these devices will have a significant
impact on overall distribution system performance. As a result, continuous monitoring and
control of DER may be needed. The current industry direction for DER monitoring and control is
a separate DERMS which handles the direct interface to DER for monitoring and control
purposes rather than DSCADA. The DMS will obtain DER-related information as needed via
enterprise system integration techniques such as ESB. Figure A-17 illustrates the separation of
DSCADA and DERMS functionality for field device monitoring and control.

A-35
Figure A-17 Separation of DSCADA and DERMS Functionality
The DMS shall use available DER, both customer-owned and utility-company-owned, to help
control real and reactive power requirements on the distribution system. The DMS shall be able
to request DG power factor modifications and remote generation disconnection. The DMS shall
also monitor in real time, actions taken by the IPPs, such as verification that requested load
reduction has actually taken place. The DMS shall also enable the utility to monitor the
performance of customer-owned power generators.
The DMS shall include facilities to enable the utility to incorporate IPPs into real-time
generation dispatch and control. The DMS shall be able to use a customer’s DG unit to help
control real or reactive power imbalance on a distribution circuit. The DMS (or AMI system)
shall monitor energy flow at the metering point to determine customer response. The DMS shall
be able to control generation MW/MX output using SCADA in a manual mode and perform
power balancing and generation dispatch in an automatic mode. In manual mode, the dispatcher
shall be able to specify the amount of MW/MX and send that through SCADA. In automatic
mode, generator control will be placed in AUTO, and the DMS application shall dispatch
through SCADA.
The DMS shall include monitoring and control of temporarily isolated (“islanded”) portions of
the distribution system powered by distributed generating resources owned by IPPs and the
utility company. This is commonly referred to as “microgrid” operation, which is the intentional
islanding of selected portions of the distribution system to enhance reliability and provide high
power quality to customers with sensitive loads. All applications, including OLPF, shall be
capable of solving the islands energized by generators provided that islands are feasible
(i.e., there is enough generation to supply loads and losses in those islands).
Industry activities to create DER standards have thus far focused almost exclusively on the
behaviours of individual DER units and the communication protocols over the field networks
that connect directly to these devices. The functions include, for example:
Field Devices
Distribution
SCADA
Substation
Devices
•Basic alarms
•Displays
•Archiving
Advanced
Distribution
Applications
•Data Management
•Operating model
•On-line power flow
•Volt VAR
•Auto restoration
DMS
Advanced
Metering
System (AMI)
Outage
Management
System (OMS)
Geographic
Information
System (GIS)
Enterprise
Service
Bus
E
S
B
DER
Interfaces
•DER Monitoring
•Smart Inverter
Functions
Advanced
DER
Applications
•Request VAR support
•Request Watt support
•Limit generation
•DER forecast
•Others
DERs
DERMS
A-36
• Intelligent Volt-VAR control
• Intelligent Volt-Watt control
• Reactive power/power factor
• Low-voltage ride through
• Load and generation following
• Storage systems charge/discharge management
• Connect/disconnect dynamic reactive current injection (responding to changes in voltage
dV/dt)
• Max generation limiting
• Intelligent frequency-watt control
• Peak limiting function for remote points of reference
In Figure A-17, the function of managing the DER devices is shown as an enterprise application
called a DERMS. In actual implementations, DERMS functionality may or may not be a
dedicated software. Stand-alone DERMS products could be developed and deployed, or DERMS
functionality could be integrated into DMS, EMS, SCADA, or other applications. Nevertheless,
it is beneficial at this early stage of industry consideration to think of a DERMS as a separate
logical entity so that the interactions between DER and other utility systems can be identified
and supporting information standards developed.
A.1.22 Demand Response Management
One of the key challenges for today’s electric utilities is mitigating the demand growth before it
has to be met with heavy investments in new infrastructure capacity. The primary mitigating
measures are considered to be energy efficiency and demand reduction (EEDR) programs.
Demand response (DR, also known as load response) enables end-use customers to reduce their
use of electricity in response to power grid needs, economic signals from a competitive
wholesale market, or special retail rates. Wholesale electricity markets provide opportunities for
end-use customers to realize value for reducing their demand for electricity. DR is an integral
part of markets for energy, ancillary service, and capacity. DR may compete equally with
generation in these markets.
Achieving DR goals will require additional metering and communication facilities that will
enable the utility to send signals about electricity prices and system grid reliability directly to the
customers over networks such as the Internet. Facilities are also needed to enable measurement
& verification (M&V) of the end customer’s response to a DR event (call for demand reduction).
The DMS should be able to use these DR facilities for implementing “surgical” load reduction
when needed. For example, if a load transfer operation by the FLISR application is blocked due
to high load, then the DMS should be able to call upon DR where possible to reduce the load and
therefore enable the load transfers to go through.
A-37
A.1.23 Emergency Load Shedding
The DMS shall include an emergency load shedding (ELS) function that shall be executed in real
time on request. This function shall be synchronized with load shedding functions that are
executed in EMS (under frequency, under voltage load shedding). The objective of ELS is to
minimize the manual effort that is required to shed a specified amount of load and restore the
previously shed load when the initiating problem is corrected. The user shall be able to initiate
load shedding only for loads that are included in the user’s assigned AOR.
When emergency load shedding is required, the user will activate the ELS function and enter the
amount of load to be shed. The ELS shall then determine which switching devices to operate to
accomplish the load shedding objective.
A.1.24 Smart EV Charging
Widespread deployment of EVs is not expected in the near term on the electric distribution
system of many utility companies. However, there may be some areas with pockets of high EV
deployment. Even low levels of EV adoption will have a significant impact on utilities and the
grid—a single EV plugged into a fast charger can double a home’s peak electricity demand.
The DMS should include suitable mechanisms for managing EV charging in a manner that is
optimized for grid load while guaranteeing that drivers’ schedules and range requirements are
met. Unmanaged EV charging will add to peak grid load and would require additional generation
capacity. EV charging must be scheduled intelligently in order to avoid overloading the grid
peak hours and to take advantage of off-peak charging benefits. With a DMS, the utility can
manage when and how EV charging occurs while adhering to customer preferences, collect EV-
specific meter data, apply specific rates for EV charging, engage consumers with information on
EV charging, and collect data for greenhouse gas abatement credits.
A.1.25 Asset Management
The DMS shall include an Asset management (AM) application function that shall enable the
electric utility to track the current operating condition of each piece of electric power apparatus
(e.g., transformers, switches, and voltage regulators). The AM function shall collect real-time
and near-real-time information that shall enable the electric utility to determine the operating
duty performed by each device and the amount of “wear and tear” that has occurred on each
piece of power apparatus since the last time the equipment was thoroughly inspected and/or
repaired.
The DMS AM information shall enable the utility to implement a “condition-based” maintenance
program in which maintenance activities are performed based on the amount of duty performed
by the device rather that calendar time between maintenance activities.
At a minimum, the DMS shall automatically track the information listed below and use this
information for determining if an inspection (visual or “tear down”), repair, or equipment
replacement is needed. The following information shall be used by the DMS to support the AM
calculations:
A-38
• Equipment counters for all power apparatus that is equipped with counters;
• Contact wear indicators on all circuit breakers;
• Alarms and alerts generated by special purpose sensors such as partial discharge detectors,
on-line oil/gas analyzers, and moisture detectors; and
• Quantity and magnitude of through-fault events for each device.
A.1.26 Engineering Analysis Tools
The DMS should include a suite of applications that engineers may use for planning and design
purposes and for conducting “post mortem” analysis following unusual operating events, such as
protective relay misoperation. The DMS engineering analysis tools should be similar in function
to the “off-line” analytical software that electric utility engineers have used for decades for
capacity planning, protective relay coordination, electrical loss studies, and other functions
pertaining to the planning and design of electric distribution systems.
While the DMS engineering analysis tools are primarily intended to handle near-real-time
operational problems, such as verifying that proposed switching activities do not produce
unacceptable electrical conditions, the DMS tools may also support other “off-line” engineering
analysis. In fact, some utilities have considered using the DMS software tools for engineering
applications and eliminating separate “off-line” tools altogether. The benefits achieved by using
a single set of software tools include:
• The same distribution system model can be used for operational purposes and for
engineering analysis. There is no need to build and maintain separate models for
operational needs and engineering needs.
• Engineers will have better access to the “as-operated” model of the electric system. This
will simplify post-mortem studies performed by the engineers because engineers will not
have to spend time re-creating the circumstances that existed when the unusual event
occurred.
• Having access to the as-operated model at all times will simplify capacity planning
because engineers will spend much less time “scrubbing” the load measurement data to
ensure that load measurements are not “double counted” due to feeder reconfiguration
that takes place during the year.
At a minimum, the following engineering analysis functions should be available in the DMS for
performing “off-line” engineering analysis:
• OLPF and SE
• SCA
• Protective relay analysis and coordination
• Reliability analysis
• Energy loss calculations
A-39
• ONR
• Voltage regulator/tap changer settings
• Short-term/long-term load forecasting
• Capacity planning
• Thermal monitoring
• Capacitor placement
• Motor start
The DMS shall also include “study” mode for all applications, which allows users to simulate the
operation of the distribution system for performing “what if” studies, outage planning, and other
such activities. Study mode shall provide the operators and engineers with voltage, current, real
power flow, and reactive power flow at any point on the distribution feeders at a specified date
and time (i.e., not real time). This mode of operation shall enable the utility to model electrical
conditions on the feeder at specified times (during peak-load and off-peak periods) before and
after proposed changes to the feeder. Study-mode execution shall enable operators and engineers
to examine “what if” scenarios. (e.g., “What if a portion of feeder ‘A’ load is transferred to
feeder ‘B’?”). Study-mode operation shall be executed upon demand.
A.1.27 Dispatcher Training Simulator (DTS)
The DMS shall include a dispatcher training simulator (DTS) that shall provide a realistic
environment for hands-on dispatcher training under simulated normal, emergency, and
restorative operating conditions. The training should be based on interactive communication
between instructor and trainee. The DMS training simulator shall include a complete replica of
the real-time DMS user interface plus the operating model which shall simulate the real-time
analog telemetry and status changes (elements’ models shall be the same).
The DMS training simulator shall serve two main purposes:
• Allow utility personnel to become familiar with the DMS system and its user interface
without impacting actual substation and feeder operations, and
• Allow utility personnel to become familiar with the dynamic behavior of the electric
distribution system in response to manual and automatic actions by control and protection
systems during normal and emergency conditions.
The DTS shall be considerably more than a simple data “playback” facility. The DTS shall
predict (compute) the behavior of the power system under normal load circumstances and during
simulated disturbances. For example, when a switch is opened by the instructor, the current
through the switch shall automatically go to zero. The event shall be properly reflected on the
trainee’s screen as open switch and coloring for non-energized state. In other words, the
distribution system model at the trainee’s console shall respond to all dynamic changes caused
by the instructor. The DTS shall fully emulate all monitoring and control capabilities of the real-
time system such as alarming, tagging, and AOR functionalities.
A-40
To support this sophisticated functionality, the DMS training simulator shall include a dynamic
model of the distribution system that shall simulate the expected behavior of the electric
distribution system in response to disturbances introduced by a training supervisor. The DMS
training simulator shall include either the same real-time model of the distribution system as it is
in the control center, or from selected saved cases that represent the distribution system at a
specific date and time. The training simulator shall include dynamic load models (profiles),
together with forecast total feeder load, that shall be used to determine current and voltage values
along the feeder during normal conditions. This information shall be displayed on the simulator
operator consoles as though the simulated values were actual field measurements.
The training simulator shall enable the user (instructor) to introduce equipment and control
failures to the system, and the simulator shall calculate and present the expected results to the
trainee. The instructor shall be able to place simulated single- and multi-phase faults at any
location along the feeder using the simulator’s supervisor console, and the simulator shall
(in turn) calculate and display the expected fault current magnitude and resultant protective
device operation(s).
It shall also be possible to introduce events into the DTS to simulate equipment failures, faults,
or other anomalies. Following the introduction of the event, the DTS shall automatically simulate
the operation of the actual automatic control equipment, such as protective relays and reclosers
that are installed in distribution substations and in the field (outside the substation fence).
B-i
Appendix B: Distribution Management System Industry Survey

B-ii
Advanced Distribution Management Systems for Grid Modernization
Distribution Management System Industry Survey
August 2015
B-iii
Appendix B — Table of Contents
B.1 DMS Industry Survey ....................................................................................................... B-1
B.1.1 Challenges to Successful DMS Implementation ............................................... B-1
B.1.2 The Market for DMS ......................................................................................... B-1
B.2 Survey Results .................................................................................................................. B-2
B.2.1 Survey Demographics ...................................................................................................... B-2
B.2.2 State of DMS Deployment ................................................................................ B-3
B.2.3 DMS Applications in the Process of Being Implemented ................................. B-5
B.2.4 Architecture for DMS and OMS ....................................................................... B-7
B.2.5 Benefits Achieved by Implementing DMS ....................................................... B-8
B.2.6 DMS Data Acquisition and Control Strategy .................................................. B-12
B.2.7 Distributed Energy Resources Monitoring and Control .................................. B-15
B.2.7.1 DER Monitoring ............................................................................. B-15
B.2.7.2 DER Control ................................................................................... B-15
B.2.7.3 DER Communications .................................................................... B-16
B.2.7.4 DMS Communication Infrastructure Functions.............................. B-17
B.2.7.5 Standards for Monitoring and Control of DER............................... B-17
B.2.7.6 Microgrids ....................................................................................... B-18
B.2.8 Security — Critical Infrastructure Protection (CIP) Compliance ................... B-19
B.2.9 Power Quality (PQ) ......................................................................................... B-20
B.2.9.1 Power Quality Enhancements ......................................................... B-20
B.2.9.2 Preferred Architecture ..................................................................... B-21
B.2.10 Significant Challenges ..................................................................................... B-21
B.3 Summary of Survey Findings ......................................................................................... B-23
B-iv
Figures
B-1 Survey Responses by Country ...........................................................................................B-3
B-2 Responses by Organization Type ......................................................................................B-3
B-3 DMS Implementation Status .............................................................................................B-4
B-4 DMS Applications Being Implemented ............................................................................B-6
B-5 Application Ranking Comparison .....................................................................................B-7
B-6 Approaches to DMS-OMS Integration..............................................................................B-8
B-7 Benefits Attributable to DMS..........................................................................................B-10
B-8 DMS Opportunity Matrix ................................................................................................B-12
B-9 DMS Data Acquisition and Control Strategy ..................................................................B-14
B-10 Use of AMI for DMS Communications ..........................................................................B-14
B-11 DER Monitoring ..............................................................................................................B-15
B-12 DER Control ....................................................................................................................B-15
B-13 General Approach to DER Communications ..................................................................B-16
B-14 Communication Methods for IEDs and DER..................................................................B-17
B-15 DMS Communication Infrastructure Functions ..............................................................B-17
B-16 Communication Standards Used for DER.......................................................................B-18
B-17 Number of Microgrids Deployed ....................................................................................B-19
B-18 Microgrid Controller Objectives .....................................................................................B-19
B-19 CIP Compliance ..............................................................................................................B-20
B-20 Power Quality Enhancements .........................................................................................B-21
B-21 Preferred Architecture for Power Quality Enhancement ................................................B-21
B-22 Significant Challenge of DMS Implementation ..............................................................B-22
B-1
B.1 DMS Industry Survey
Arguably, no portion of the electric power grid has been affected more by grid modernization
than the electric distribution system. The so-called “smart grid” has transformed the electric
distribution system from mostly manual, paper-driven business processes to electronic,
computer-assisted decision making with a high degree of automation. At the heart of this
transformation is the distribution management system (DMS), which is a set of integrated
computer and communication systems whose purpose is to assist the distribution system operator,
engineers, and other electric utility personnel in monitoring and controlling the distribution
system in an optimal manner without compromising safety or asset protection.
This document contains the results of a literature search and survey conducted on behalf of
Argonne National Laboratories (Argonne) and the IEEE PES DMS Task Force to identify and
document trends in DMS applications by North American electric utilities and to document the
results achieved by utilities that have several years of DMS operating experience “under their
belts.”
B.1.1 Challenges to Successful DMS Implementation
Utilities that are contemplating implementing a DMS face numerous challenges. The first and
foremost challenge is developing a business case that demonstrates that the benefits achieved by
implementing a DMS outweigh the costs to implement and sustain the new system. Unlike its
counterpart on the transmission system — the energy management system (EMS) — a DMS is
not considered at this time to be an essential, mission-critical system. As a result, a solid business
case is needed to determine the economic merits of DMS implementation. In many cases, the
economic payback of implementing a new DMS is positive but is not sufficient to justify
immediate investment. The lack of a solid business case often results in piecemeal
implementation of advanced applications for worst-performing circuits.
Another common barrier to successful DMS implementation is the lack of mature, field-proven
products. The DMS is still a relatively new concept, and vendors and utilities alike do not have
many years of operating experience for these applications. As a result, the early implementers of
DMS are still gaining experience, such as identifying and correcting errors as new operating
conditions are encountered.
B.1.2 The Market for DMS
Despite significant barriers to faster DMS uptake, this market will likely see steady growth over
the next several years. According to a new report from Navigant Research, the worldwide DMS
market will grow from $507 million in 2013 to $935 million in 2020.
Utilities of all sizes have installed management systems such as supervisory control and data
acquisition (SCADA), outage management systems, DMS, or a combination of the three. Smaller
utilities must often fit their modernization efforts into tight operational expenditure budgets,
whereas the bigger utilities typically have larger capital expenditure budgets. In either case,
according to the report, utility managers must strike a balance between the benefits provided by a
DMS and the cost of procuring, installing, operating, and maintaining the system.
B-2
B.2 Survey Results
As part of this summary of industry trends, we conducted a survey to benchmark current
practices for DMS implementation that can serve as a guide for future system implementations.
This survey sought information on current plans to implement DMS, DMS functions of interest,
implementation challenges, functional benefits achieved, and other relevant information. These
survey results were combined (where possible) with similar surveys conducted by the IEEE
DMS Task Force in the previous three years so that trends over the years could be observed.
The survey, consisting of 20 multiple-choice questions, was sent by email to more than
300 members of the IEEE PES DMS Task Force with the permission of officers of that group.
Because all members of that group have expressed interest in DMS, readers should not consider
the group surveyed to be a completely random sampling of the industry (i.e., this group is not a
statistically valid sampling of the overall industry). Organizations that are not interested in DMS
generally are not members of this group. Hence, the survey only represents the views of entities
that are contemplating DMS. Despite the relatively small sample size, and lack of truly random
polling, we believe that the survey provides valuable insights into important issues pertaining to
DMS implementation.
While most of the survey participants work for electric utilities, the survey also includes some
inputs from individuals who are not employees of electric utilities (e.g., academic institutes,
research organizations, vendors, consultants), the objective being to capture the valuable insights
possessed by representatives of these entities. Non-utilities were requested to answer the
questions from their own points of view regarding the market, including about DMS features and
research areas on which their clients are requesting information.
The survey was conducted with a promise of strict confidentiality. Therefore, all responses are
treated with anonymity. The results of the survey are summarized in this report and were also
presented at the next DMS Task Force meeting, held in July 2015 in Denver, Colorado. Results
will also be sent to survey participants following the completion of the survey.
B.2.1 Survey Demographics
Individuals representing 77 entities responded to the survey. As Figure B-1 shows, most
responses were received from entities located in North America (the United States and Canada).
However, a small number of responses were received from participants located outside of North
America (China, Taiwan, Australia, Italy, and Austria).

B-3
Figure B-1 Survey Responses by Country
Most survey responses were supplied by electric utilities of various types, including investor-
owned utilities (IOUs), Crown corporation provincial utilities, municipals, and electric
distribution cooperatives (co-ops). Results were also received from vendors, consultants,
academic institutes, and research organizations. Figure B-2 shows the number of responses in
each of these categories.
Figure B-2 Responses by Organization Type
B.2.2 State of DMS Deployment
Participants were asked to select the item that best describes their current state of DMS
deployment. Participants were able to choose one of the items listed below. A ninth choice,
“Other,” was available to enable participants to type in something other than the eight standard
selections. The following choices available to survey participants were these:
0
10
20
30
40
50
60
Country
Company Type
#
Investor owned electric utility
47
Municipal electric utility
9
Crown Corporation
- Provincial Utility
2
Electric distribution coop
2
Vendor (System or equipment)
9
Consulting firm
4
Academic institute
1
Research organization
3
Total
77
0 10 20 30 40 50
Research organization
Academic institute
Consulting firm
Vendor (System or equipment)
Electric distribution coop
Crown Corporation -…
Municipal electric utility
Investor owned electric utility

B-4
• No plans to implement DMS.
• Just thinking about DMS; have not yet decided whether to proceed; project is on hold.
• Planning stage, including conducting a needs analysis, developing a business case,
developing general implementation strategy.
• Procurement stage, developing detailed specifications, bid evaluation, contract
negotiation.
• DMS design and test stage.
• System installation, integration, and commissioning stage.
• DMS up and running and being used for live system operation.
• Doing DMS “midlife” assessment.
• Other.
Figure B-3 summarizes the responses to the question about current state of deployment. Sixty
(60) of the 77 survey participant responded to this question. The length of the bars shows the
percentage of responses that indicated each state of deployment. The responses show that a
significant number of utilities, just under 38% of the survey participants (23 respondents), report
that they are in the “thinking about it” and “planning” stages of DMS deployment. This result
indicates that the interest in DMS is strong and that a significant number of new DMS will be
implemented in the near future. Having a growing number of operational DMS is important,
because electric utilities are gaining valuable experience into the significant benefits and new
opportunities afforded by a DMS implementation. Along with that, vendor products are gaining
maturity, which will simplify future deployments.
Figure B-3 DMS Implementation Status
A significant result is that almost 42% of the survey participants reported that their DMS is “up
and running.” This result represents an increase of about 17% from last year’s survey. It is
DMS Status
#
No Plans 3
Just Thinking 7
Planning 16
Procuring 4
Design and Test 2
Up and Running 25
“mid life” assessment
3
“mid life” assessment
Up and Running
Design and Test
Procuring
Planning
Just Thinking
No Plans
# of Responses
B-5
important to note that most utilities implement their systems in phases, with early phases
including basic functions (SCADA, geographic displays, etc.) and later phases including more
advanced functions (voltage/VAR optimization [VVO], FLISR [fault location, isolation, and
service restoration], etc.). Some utilities consider their systems to have “gone live” when the
initial basic phases are completed, even though there is still a long road to travel before they are
really done. Six of the respondents reporting that they had gone live indicated that the DMS was
partially implemented: one utility indicated that DMS was running without any advanced
applications, and two of the respondents indicated that their DMS included only distribution
automation (DA) and Voltage/VAR control (VVC).
Several respondents indicated that they were doing a “midlife” assessment of a DMS that had
been in service for a number of years.
One of the respondents (a vendor) indicated that the organization is experiencing movement
from “first-generation” DMS to DMS products from a new (different) vendor. It was stated that
the original system did not live up to expectations and that the planning and procurement stages
of the DMS implementation project require improvement. This type of transition points to an
area where better industry guidelines are needed.
B.2.3 DMS Applications in the Process of Being Implemented
The next survey question asked survey participants to identify the major application functions
they are implementing or planning to implement in their DMS. Sixty-eight (68) of the 77 survey
participants answered this question. The chart shown in Figure B-4 is ordered by the percentage
of survey participants indicating that they are implementing the specific application. The four
most popular items are (1) FLISR, a.k.a. self-healing, (2) VVO, (3) on-line power flow (OLPF),
and (4) switch order management (SOM) — this ranking is the same as in last year’s (2014)
survey. This result reflects the continued interest in improving efficiency and reliability within
the electric utility community.

B-6
Figure B-4 DMS Applications Being Implemented
Several applications moved up by more than one spot compared to the 2014 ranking (higher
percentage of utilities seeking to deploy):
• Training simulator. Its increased popularity indicates growing interest in using the DMS
as a training tool for new operators; as refresher training for experienced operators; and
for engineering simulation and emergency preparedness drills.
• Distribution state estimation. More utilities are seeking to use information from
advanced metering infrastructure (AMI) and other near-real-time measurement data to
improve the quality of their OLPF calculations.
• Demand Response (DR) Management. There is growing interest in using “surgical”
demand response managed by the DMS as part of the distribution operations strategy.
Figure B-5 shows a comparison of the application ranking for IOUs versus distribution
coops/municipals. Significant differences are listed below:
• IOUs showed considerably higher interest in VVO and emergency load shedding than did
the coop/municipal group.
• Coops/municipals showed more interest in optimal network reconfiguration, load
forecasting, permits/tagging, and engineering analysis.
2014 2015 DMS Function # %
1 1 FLISR 60 88%
2 2 VVO 58 85%
3 3 On-line power flow 57 84%
4 4 Switching orders 54 79%
7 5 Training simulator 50 74%
6 6 Outage management 48 71%
5 7 Tagging & Permits 47 69%
8 8 Intelligent alarming 42 62%
11 9 Distribution state est 40 59%
9 9 Engineering analysis 40 59%
10 10 Electronic map updates 39 57%
12 11 DER Management 36 53%
13 12 ONR 33 49%
14 13 Emerg load shedding 28 41%
15 14 Contingency analysis 19 28%
17 15 DRmanagement 18 26%
16 16 Load forecasting 17 25%
18 17 Asset management 6 9%
18 18 EV Management 6 9%

B-7
Figure B-5 Application Ranking Comparison
B.2.4 Architecture for DMS and OMS
Today’s electric utilities are showing considerable interest in outage management systems
(OMS), which have many synergies with DMS:
• Both types of systems are important operational support tools that are used by operating,
engineering, and management personnel throughout the electric utility organization.
• OMS and DMS both require an accurate “as operated” model of the electric distribution.
While the modeling requirements for DMS and OMS are different (DMS requires a full
“power flow” model that contains topology and electrical impedances; OMS requires
connectivity and customer counts), it is essential that common portions of these models
be in synchronism.
• Some applications, like switch order management, are usually offered by DMS vendors
and OMS vendors. While the DMS version includes power flow validation of switching
steps, the two variations of the applications are very similar.
As a result of the commonalities listed above, a key industry trend is the combination of OMS
and DMS in a single platform.
Coop, Muni IOU
Intelligent alarm processing 9 8
Electronic map updates 13 12
Switching order management 4 4
Permits, tagging 3 7
Distribution state estimation 8 10
On-line power flow 2 3
Outage management 12 6
VVO 7 2
FLISR 1 1
Optimal Network Reconfiguration 11 14
Asset management 19 19
Management of DERs 10 11
Management of EV charging 18 18
DR management 16 16
Emergency load shedding 17 13
Contingency analysis 15 15
Load forecasting 14 17
Engineering analysis 6 9
Training simulator 5 5
Rank
Application

B-8
Survey participants were asked if their DMS strategy includes both DMS and OMS functionality.
If a DMS/OMS strategy was planned, participants were asked to identify which of the following
items best describes the strategy to integrate the DMS and OMS functionality:
• Separate Systems – No Interface. DMS and OMS functionality is implemented on two
completely separate systems that do not share information in digital fashion.
• Separate Systems with Digital Interface for Data Sharing. DMS and OMS are
implemented on different systems that share data via a digital network.
• Single System – Separate Models. DMS and OMS are implemented on a single system,
but separate models are used by OMS and DMS.
• Single System – Shared Model. DMS and OMS are implemented on a single system,
and a single model is shared by OMS and DMS.
The results are summarized in Figure B-6. As this figure shows, an integrated approach to
DMS/OMS is strongly preferred by the survey participants, with more than 80% preferring a
solution architecture that allows the DMS and OMS to exchange data in digital fashion. Fifty-
two percent (52%) of the survey participants expressed a preference for a single platform that
supports both DMS and OMS applications. Survey participants that use separate systems for
DMS and OMS often do so because an existing legacy OMS cannot be expanded to include the
required DMS application function, or because an existing DMS does not support OMS
functionality. When determining a suitable strategy for DMS, the need for OMS functionality
should be carefully examined and taken into account during vendor selection.
Figure B-6 Approaches to DMS-OMS Integration
B.2.5 Benefits Achieved by Implementing DMS
This survey question requested information on the general types of benefits that have been
achieved by survey respondents who have already implemented all or part of a DMS.
Responders were given a list of potential DMS benefits (see the list that follows) and were asked
Approach to DMS - OMS Integration
% o f
Responses
DMS and OMS are implemented on a single system, and a single model
is shared by OMS and DMS
52%
DMS and OMS implemented on different systems that share data via a
digital network
29%
DMS and OMS are implemented on a single system, but separate
models used by OMS and DMS
6%
DMS and OMS functionality implemented as two completely separate
systems that do not share information in digital fashion
3%
Othe r 10%
- Currently evaluating options
- Prefer maximum integration, but client legacy systems may need
accommodation
- DMS and OMS implemented on different systems and a single model is
shared by OMS and DMS
B-9
to select all that apply to their specific implementation. Survey respondents were also given the
selection choice “Other” to enable respondents to enter benefits that were not included in the
suggested list. Potential benefits specified on the survey were these:
• Improved reliability of customer service
• Field workforce productivity improvement
• Control center personnel productivity improvement
• Deferred or eliminated significant capital expenditure
• Reduced electrical losses
• Reduced peak electrical demand
• Reduced overall energy consumption (energy conservation)
• Voltage profile improvement
• Power quality improvement
• Deployment enabled of condition-based maintenance (CBM)
• Accommodation for growing penetration of DER
• Deployment enabled of grid-connected or “islanded” microgrids
• Other (please specify)
Figure B-7 shows the percentage of respondents who indicated that the specified benefit was
achieved by implementing DMS.

B-10
Figure B-7 Benefits Attributable to DMS
If you have already implemented DMS, what general benefits have been
achieved (check all that apply)
Answer Options
Response
Percent
Control center productivity improvement
70.8%
Voltage profile improvement
66.7%
Improved reliability of customer service 62.5%
Field workforce productivity improvement
54.2%
Reduced peak electrical demand
50.0%
Power quality improvement
50.0%
Reduced electrical losses
45.8%
Reduced energy consumption 37.5%
Deferred capital expenditure
29.2%
Accommodation of DER
25.0%
Condition-based maintenance (CBM)
20.8%
Microgrids
16.7%
Improved workforce safety
8.3%
Outage communication to customers
8.3%
0% 10% 20% 30% 40% 50% 60% 70%
Improved workforce safety
Outage Communication to customers
Microgrids
Condition based maintenance (CBM)
Accommodate DERs
Deferred capital expenditure
Reduced energy consumption
Reduced electrical losses
Reduced peak electrical demand
Power quality improvement
Field workforce productivity…
Improved reliability of customer service
Voltage profile improvement
Control center productivity…
B-11
The benefits attributed to DMS appear to be well aligned with the DMS functions that have been
implemented by the respondents. DMS functions that can contribute to each of the benefit
categories are listed below (examples given for benefits that were listed on more than 50% of the
responses):
• Control center personnel productivity improvement:
o Electronic mapping will eliminate many hand-drawn map updates, which is a tedious,
time-consuming process for control room operators.
o SOM will automate many of the business processes that are used by control room
personnel to generate switching orders.
o Training simulators will reduce the amount of senior operator time dedicated to on-
the-job training of new system operators.
• Voltage profile improvement:
o VVO will play a key role in ensuring that service delivery voltage is well within
acceptable range for all customers under all loading conditions.
o DER management will help ensure that the output of DER (including intermittent
renewables) does not produce high- or low-voltage conditions.
• Improved reliability of customer service; improved customer outage communications:
o FLISR will restore service rapidly (in 1 min. or less) to customers connected to
“healthy” portions of a faulted distribution feeder.
o Optimal network reconfiguration is an application that identifies manual
switching that can be performed to reconfigure the distribution network in a
manner that minimizes service restoration time.
o Predictive fault location is an application that can be used to pinpoint fault
location (within a few spans) using short-circuit analysis and fault magnitude
information from intelligent electronic devices (IEDs).
• Field workforce productivity improvement:
o The permits tagging and clearances function streamlines the process of requesting and
receiving permits, tagging instructions, clearances, and other safety protection
guarantees. Having this capability will minimize the amount of time field crews
spend waiting for information.
o Switch order management will reduce the time needed to prepare switching orders
that are required to enable field personnel to work in a safe and efficient manner.
o FLISR and predictive fault location will provide more accurate fault locations, which,
in turn, will reduce the amount of time spent by field crews on fault investigation.
• Reduced electrical losses, peak demand, and energy consumption:
o VVO will enable the electric utility to operate voltage regulators, substation load tap
changers (LTCs), switched capacitor banks, and other voltage and VAR control

B-12
devices to achieve various operating objectives including reduce losses, lower peak
demand, and overall energy conservation.
o Optimal network reconfiguration will enable the electric utility to identify manual
switching actions that can be performed to configure the feeder for minimal losses
and overall improved efficiency.
Figure B-8 contains a “DMS opportunity matrix” that identifies monetary and strategic benefits
that can be achieved by implementing various DMS application functions.
Figure B-8 DMS Opportunity Matrix
B.2.6 DMS Data Acquisition and Control Strategy
The decision support and automatic control advanced applications that are included in the DMS
require real-time and near-real-time measurements from various strategic locations throughout
the electric distribution system. As a minimum, measurements are required from the following
strategic locations:
• Substation end (“head end”) of feeder.
• Feeder extremities, including feeder end points that are located furthest from the
substation end of the feeder.
• Heavily loaded lateral branches.
DMS Functional Requirements
Enabling
Function
Safety Reliability
Asset
protection
Efficiency
Peak
shaving
Asset
Utilization
Manage
DERs
Manage Evs
Data Acquisition & Control X X
State Estimation X
Graphical User Interface X
Historical Information System
X
Distribution System Model X
Load Models
X
Topology Processor
X
On-Line Distribution Power Flow
X
Intelligent Alarm Processing X X X
Tagging, Permits and Clearances
X
X
X X
Short Circuit Analysis X
X
Sw itch Or der Management X X
X X
Volt-VAR Optimization
X X X
X
FLISR X
X
Predictive Fault Location X
Optimal Network Reconfiguration X X
X X
Short Term Load Forecasting X X X
X X
Dynamic Equipment Rating
X X
DMS Control of Protection Settings X X
DER Management X
X X X X
Demand Response Management X X
Emergency Load Shedding X
EV Charging X
X
Dispatcher Training Simulator X
X X X X X
X X
B-13
• Locations near midline voltage regulators and switched capacitor banks.
The DMS should be able to remotely control various components of the electric power apparatus
(switches, voltage regulators, switched capacitor banks, etc.) as required by the DMS
applications being implemented.
Survey participants were asked to identify the ways in which an existing or planned DMS
performs real-time data acquisition and control. Participants were asked to identify one or more
approaches being used (or planned). The following multiple-choice selections were provided in
the survey question:
• SCADA facilities that are an integral part of the DMS. That is, the monitoring and
control facilities were supplied by the same vendor that supplied the DMS itself.
• Distribution SCADA system that is separate from the DMS. The DMS uses
continuous monitoring and remote control facilities for the distribution system that were
supplied by a vendor other than the DMS supplier. In most cases, distribution SCADA
facilities that were in place prior to the DMS project are used. These facilities were
interfaced to the DMS through inter-control center protocol (ICCP) or other standard
interface.
• SCADA facilities that are part of a separate EMS. It is common for equipment located
in primary substations (high-/medium-voltage [HV/MV]) to be monitored and controlled
via an existing EMS that is primarily used to manage transmission and centralized
generation facilities. Utilities that used this approach interfaced EMS and DMS facilities
via a secure ICCP link or similar facilities.
• Advanced metering infrastructure (AMI). AMI facilities are used in some cases to
supply near-real-time information from customer endpoints to the DMS applications.
• Other (please specify).
Thirty-five (35) of the participants responded to this question. The results are shown in
Figure B-9. As this table shows, almost two-thirds of the survey participants indicated that
remote monitoring and control would be provided (at least in part) by SCADA facilities supplied
by the DMS vendor (an integral part of DMS). It should be noted that more than 82% of the
survey participants reported that more than one mechanism was used to handle the DMS data
acquisition and control requirements.
It is encouraging to see that almost half (49%) of the survey participants were using (or planning
to use) AMI data as a major source of near-real-time information for the DMS applications. This
response level clearly indicates that the participating utilities are planning to leverage AMI
information for operational purposes other than customer billing.
B-14
Figure B-9 DMS Data Acquisition and Control Strategy
The survey also asked if participants plan to use available AMI communication infrastructure to
support the DMS data acquisition and control functions. The answers are summarized in
Figure B-10.
Figure B-10 Use of AMI
for DMS Communications
In addition to the simple Yes/No answers to this question, survey participants also provided the
following comments pertaining to this topic:
• AMI communication was not fast and reliable enough.
• Respondents plan to use AMI communications for DMS where systems share same
geography.
• Volt/VAR application uses AMI voltage alerts in real time as input to the application.
• There are some concerns about bandwidth and latency for any use that requires real-time
or near real-time data and alarms — particularly for anything in scale beyond limited
pilots (and not just from the communications network, but also through an AMI/meter
data management system (MDMS) [versus direct distributed network protocol or DNP3
communications to SCADA/DMS]). For example, respondents have heard of delays of
15–60 min. for voltage data, which would render the data useless or misleading for
volt/VAR applications.
DMS Data Acquisition and Control Strategy
% of
Responses
SCADA facilities that are an integral part of the DMS 63%
Distribution SCADA system that is separate from the DMS 26%
SCADA facilities that are part of a separate energy managem
34%
Advanced metering infrastructure (AMI) 49%
Other (please specify) 11%
- DA Pilot Project 3%
- multiple data streams including some exclusive to DMS 3%
- Load and generation forecasting systems 3%
- SCADA integration with OMS/DMS & stand-alone FLISR 3%
- SCADA this integral part of EMS, DMS and OMS 3%
- AMI voltage alerts for End-of-Line (EOL) voltage input. 3%
Use AMI to support DMS Comms? % of Responses
Yes 66%
No 34%

B-15
• Respondents plan to use AMI to gather voltage data from endpoints and feed data to state
estimation.
B.2.7 Distributed Energy Resources Monitoring and Control
This section of the report presents survey results pertaining to the deployment and use of DER by
the electric distribution utility.
B.2.7.1 DER Monitoring
Survey participants were asked to identify the types of DER that are currently monitored on a
continuous basis. Participants were asked to check all that apply. This survey question elicited a
total of 35 responses. The results are summarized in Figure B-11.
Figure B-11 DER Monitoring
As indicated in Figure B-11, more than half of the entities that responded to this question are
currently monitoring DER that are connected to the distribution feeders. Fewer survey
participants are monitoring energy storage and controllable loads (DR facilities).
B.2.7.2 DER Control
Survey participants were asked to identify the types of distributed energy resources that are
currently controlled by the electric distribution utility. Once again, survey participants were
asked to check all that apply. Approximately one-half of the entities that responded to this
question indicated they plan to control distributed generating resources (Figure B-12). Only a
small percentage of respondents indicated they are controlling, or plan to control, energy storage
for DR facilities.
Figure B-12 DER Control
DER Monitored
% Responses
Distributed generation (including intermittent renewables) 54%
Energy Storage 11%
Controllable Loads (Demand Response)
14%
None of the above 29%
DER Controlled % Responses
Distributed generation (including intermittent renewables)
50%
Energy Storage
15%
Controllable Loads (Demand Response)
15%
None of the above
35%

B-16
B.2.7.3 DER Communications
The survey included several questions pertaining to the mechanisms used to handle
communications with the distributed energy resources located out on electric distribution feeders.
The first question seeks information on the general mechanism used to handle communications
between a DMS and DER located at customer sites. Respondents were asked to select one or
more approaches based on their current approach to DER communications.
Figure B-13 summarizes the results of this question. As this chart shows, more than two-thirds of
the respondents indicated that they communicate directly from the DMS to the DER. Slightly
more than one-third of the respondents indicated that the DMS communicates (or will
communicate) with the DER via a separate, stand-alone DER management system (DERMS). A
smaller percentage (approximately 15%) intends to communicate with DER via an aggregator or
similar service provider.
Figure B-13 General Approach
to DER Communications
Survey participants were also asked to identify the specific types of communication media that
are used or will be used to handle communications between DMS and DER that are located in
the field. Figure B-14 summarizes the results of the responses to that question.
Method of Communicating with DERs % of Responses
Communicate directly from DMS or SCADA to
DER
69%
Communicate from DMS or SCADA to a separate
DER management system (DERMS) which
connects to the DERs
35%
Communicate with a DER aggregator/service
provider who manages the direct interface to the
DER
15%

B-17
Figure B-14 Communication Methods
for IEDs and DER
As the chart shows, most survey participants plan to use the available cellular communication
facilities for handling communications between DMS and DER located in the field.
Approximately one-half of the participants (49%) indicated that they will use either Ethernet or
radio frequency (RF) communication facilities. Lower percentages of survey participants plan to
use microwave, wireless local network (Wi-Fi, ZigBee), and power line communication.
B.2.7.4 DMS Communication Infrastructure Functions
Survey participants were queried regarding the types of supporting communication functions that
are included or will be included in communication facilities used by the distribution management
system. Figure B-15 summarizes the responses received to this question.
Figure B-15 DMS Communication Infrastructure Functions
B.2.7.5 Standards for Monitoring and Control of DER
A significant amount of effort is being expended by various industry standardization groups to
identify suitable standards for communicating with distributed energy resources. Because the
communication mechanism for distributed energy resources involves some new monitoring and
control functions that are not commonly implemented in a traditional power system’s electrical
apparatus (switches, capacitor banks, etc.), there may be a need to develop new standards or to
Communication Media
% of
Responses
wireless cellular communication (3/4 G, LET, etc) 71%
ethernet 49%
RF radio 49%
microwave communication 23%
wireless local network (Wi-Fi, Zigbee,etc.) 17%
power line communication 14%
Other (please specify) 20%
- Fiber network
- fib re , sa tellite
- MAS radiio
- Micro grid
- under study a t this time
- Utilty provided communications
Communication Infrastructure Functions
% of
Responses
encryption 50%
quality of service (QOS) support (e.g.,different communication delays for d
44%
authentication 44%
different connection modes (e.g., direct peer to peer ad hoc mode and ce
36%
Unsure 6%

B-18
expand on existing standards (such as DNP3 and International Electrotechnical Commission
[IEC] 61850) to support the evolving needs for DER communications.
Survey participants were asked what standards they plan to implement for monitoring and
control of DER in DMS. The results are summarized as follows in Figure B-16:
Figure B-16 Communication
Standards Used for DER
As this chart shows, most survey participants identified DNP3 and IEC 61850 as their
communication protocol/standard of choice. This result is most likely attributable to the basic
familiarity of the electric utility industry with these established communication standards. As
new DER-specific standards continue to be developed, it is expected that use of standards that
have been developed specifically for DER will grow in popularity among the electric utility
community.
B.2.7.6 Microgrids
This portion of the survey included several questions pertaining to the use of microgrids, which
are relatively small portions of the electric power grid that can be connected or disconnected
from the main portion of the power grid and operate autonomously if desired. There is growing
interest within the industry and its associated regulating bodies in building electric distribution
systems that are capable of operating in island mode (completely separated from the main power
grid) or in “grid-connected” mode. In grid-connected mode, the internal DER are controlled in a
manner that makes the most effective use of these resources.
Figure B-17 below summarizes the response to a question about the number of microgrids that
are currently implemented on the electric distribution system. As this chart shows, the vast
majority of survey participants indicated that they do not have any microgrids, do not plan to
have any microgrids, or have one microgrid.
Comm Standards for DERs
% o f
Responses
DNP 3 67%
IEC 61850 31%
SunSpec Modbus
11%
Smart energy profile (SEP 2) 6%
develop customize standard 3%
not sure 19%
Other (please specify) 8%
- 104
- internal legacy protocol standard
- Seems to us that IEC 61850 is
not being adopted in North
America for distribution.

B-19
Figure B-17 Number of Microgrids Deployed
Entities that either have or plan to have one or more microgrids on the system were asked to
identify the microgrid functionality they plan to implement. A total of 16 responses were
received; Figure B-18 summarizes the results to this question. A large percentage of survey
participants indicated that they are planning to deploy both island operation and grid-connected
applications. The most popular microgrid application is fault detection and isolation, in which
the microgrid may be converted to island mode upon loss of the supply from the main electric
utility.
Figure B-18 Microgrid Controller Objectives
B.2.8 Security — Critical Infrastructure Protection (CIP) Compliance
Security is a major concern of information technology (IT) managers and others who are
contemplating the implementation of a DMS. Much experience in this area has been gained with
EMS that are being used to manage the operation of the bulk power grid, including transmission
lines and centralized generation. The EMS and its associated applications and data acquisition
and control facilities are, for the most part, classified as critical infrastructure and are therefore
subject to critical infrastructure protection (CIP) compliance.
The question of whether DMS monitoring and control facilities should also be classified as
critical infrastructure is a matter of much debate within the electric utility industry. Entities that
are in favor of classifying distribution facilities as critical infrastructure cite the capability of the
DMS user to rapidly shed load, including critical loads (hospitals, government offices, fire and
police facilities, municipal infrastructure such as sewage treatment, etc.), as a reason that DMS
should be classified as critical infrastructure. Integration of DMS with other IT systems that are
How many micro-grids do you currently have in your
system?
#
Responses
zero but plan to have more
13
zero, and do not plan to have any 11
more than one 3
one
2
Microgrid Controller Objectives
% of
Responses
islanding operation 88%
grid connected operation 94%
power quality enhancement, including harmonics unbalance 25%
fault detection and isolation 69%
reclosing to external utility grid 50%
Other (please specify) 13%
- end of line voltage support
- Customer cost minimization

B-20
generally classified as business related is a factor that greatly complicates the conversion to a
CIP-compliant facility.
Survey participants were asked to indicate whether they considered their DMS facility to be a
CIP-compliant facility. The results are shown in Figure B-19.
Figure B-19 CIP Compliance
As this chart indicates, the majority of survey participants (more than 50%) are uncertain at this
time whether their proposed DMS facility should be CIP compliant. Some utilities
(approximately 22% of the surveyed participants) indicated that portions of the system, such as
facilities to control substation equipment that is classified as transmission, are often classified as
critical infrastructure. A smaller portion of the participants (7% or less) have declared their DMS
to be compliant.
Clearly, the industry needs guidance on how to proceed with DMS security.
B.2.9 Power Quality
There is growing interest within the electric utility community in online power quality
monitoring and analysis that will enable the utilities to collect high-resolution voltage and power
quality data and perform forensic engineering analysis on this data. Reasons for this increased
emphasis on power quality include the growing penetration of electrical and electronic devices
whose operation may be adversely impacted by the presence of harmonics and nonlinear voltage
waveforms. As a result, new power quality sensors may be added at critical equipment locations
along with analytical tools for processing the data provided by the sensors and providing
actionable information.
To address these issues, the survey included several questions pertaining to power quality
analysis and architecture. Responses to these questions are described in the following two
subsections.
B.2.9.1 Power Quality Enhancements
Survey participants were asked to identify aspects of power quality assessment that are of most
interest. Figure B-20 contains a summary of the responses to this question.
to what extent is your DMS critical infrastructure protection (CIP) compliant?
% o f
Responses
Not sure at this point 52%
Portions of the DMS, such as control of substation assets, are treated as CIP facilities 22%
DMS facilities are not CIP compliant 7%
DMS is completely CIP compliant 7%
Other (please specify) 11%
- Capability to add go to CIP compliance exists within system

B-21
Figure B-20 Power Quality Enhancements
As Figure B-20 shows, survey participants are most interested in monitoring and analyzing
harmonics and frequency/voltage amplitude deviation. The DMS may include applications to
support various power quality analysis needs, such as waveforms and fault recorder capabilities,
flicker analysis, and the derating of substation transformers owing to high harmonic content.
B.2.9.2 Preferred Architecture
Survey participants were asked to identify their preferred architecture for “power quality
enhancement.” The results of this question are shown in Figure B-21. As this chart shows, most
survey participants indicated that the power quality data acquisition and analysis system would
use a hybrid architecture in which some components are decentralized (e.g., the sensors) and
some components are centralized (e.g., waveform and fault recorder functions, flicker analysis).
Figure B-21 Preferred Architecture for Power Quality Enhancement
B.2.10 Significant Challenges
The last question in the survey asked survey participants to identify the topics that are of most
interest to them. These are the topics that have posed a challenge to utilities that have
implemented a DMS or are planning to do so. It would be beneficial to have some form of
industry guidebook that would enable utilities to exchange information on dealing with the
challenges of each step. These topics should be reviewed as areas in which the industry research
organizations, academic institutions, and the IEEE DMS Task Force should focus their efforts.
Figure B-22 summarizes the responses to this question.
Power Quality Enhancements of Interest
% o f
Responses
harmonics 44%
high frequency resonance (over 20 times line frequency) 8%
frequency and voltage amplitude deviation 42%
Other (please specify) 6%
- Voltage quality measured at End of Line (EOL)
- Tracking momentaries and other disturbances indicative
of potential failures (predictive maintenance)
Prefered Architecture for Power Quality Enhancements
% of
Responses
hybrid (centralized plus decentralized) 50%
centralized in DMS 29%
decentralized and micro-grid controller or the controller for distributed sources 21%

B-22
Figure B-21 Significant Challenge of DMS Implementation
As has been the case in previous year’s surveys, the biggest challenge that utilities have faced in
DMS deployment has been in the area of system integration. The DMS requires many interfaces
to existing corporate computing systems, including the geographic information system (GIS),
engineering analysis, AMI, OMS, and others. This activity requires an extensive collaborative
effort between IT and OT staff members, the DMS vendor, and possibly an external system
integrator (SI). Often expenditures on system integration activities greatly exceed the cost to
purchase and configure the actual DMS. As a result, there is great incentive to perform these
activities in an effective and efficient manner.
Answer Options
Response
Percent
Response
Count
Planning a new system 25.0% 9
Developing the business case 50.0% 18
Preparing Detailed specifications 30.6% 11
Soliciting and evaluating vendor proposals 19.4% 7
System design and test activities 36.1% 13
DMS integration with external systems 61.1% 22
Debugging DMS advanced software 44.4% 16
Installing, testing, and commissioning 33.3% 12
Training and change management 58.3% 21
Determining the benefits (Measurement and Verification) 38.9% 14
Other (please specify) 13.9% 5
Which of the following items do you consider to be a significant challenge in
deploying a DMS (please check all that apply)?
0.0%
10.0%
20.0%
30.0%
40.0%
50.0%
60.0%
70.0%
B-23
Training and change management is also a major concern, as has been the case in past years.
Implementing new DMS applications can have great impact on existing business processes as
manual paper-driven processes are supplanted by electronic computer-assisted decision making.
DMS implementation cannot be successful if end users are not trained to use the new system
software and if well-established business practices are not updated to address this new
functionality.
Developing a business case and then actually verifying that the benefits have been achieved has
been another major challenge for electric utilities including those utilities that have responded to
the survey. As stated elsewhere in the survey report, DMS projects generally do not proceed and
at full-scale without a sound business case that shows that the benefits that will be achieved by
implementing the DMS significantly outweigh the costs to deploy the system. Utilities are also
facing pressure to demonstrate after the system has been implemented that promised benefits
have been realized.
B.3 Summary of Survey Findings
This section summarizes the responses to the DMS survey questions.
• In terms of demographics, most responses were received from North American IOUs.
However, the survey participants included municipal and coop utilities, as well as
vendors, consultants, academic institutes, and research organizations.
• As for the current state of DMS deployment, a growing number of utilities have at least
partially deployed a DMS, and because of this trend, the DMS products available to the
industry are becoming more mature and field proven. However, there are still a
significant number of electric distribution utilities that are thinking about a DMS or
identify that they are in the planning stages for the deployment of such a system.
• The four most popular items are fault location isolation and service restoration (FLISR,
a.k.a., self-healing), volt-VAR optimization (VVO), online power flow (OLPF), and
switch order management (SOM). However, there is growing interest in the training
simulator, distribution state estimation, and demand response (DR) management.
• An integrated approach to DMS/OMS is strongly preferred by the survey participants,
with more than 80% preferring a solution architecture that allows the DMS and OMS to
exchange data in digital fashion.
• Key benefits that have been achieved by deploying a DMS include the following:
o Control center personnel productivity improvement.
o Voltage profile improvement.
o Improved reliability of customer service; improved customer outage communications.
o Field workforce productivity improvement.
o Reduced electrical losses, peak demand, and energy consumption.
• Almost two-thirds of the survey participants indicated that remote monitoring and control
would be provided (at least in part) by SCADA facilities supplied by the DMS vendor (an
B-24
integral part of DMS). More than 82% of the survey participants reported that more than
one mechanism was used to handle the DMS data acquisition and control requirements.
• Almost half (49%) of the survey participants were using (or planning to use) AMI data as
a major source of near-real-time information for the DMS applications. Roughly two-
thirds of the survey respondents indicated that they plan to use AMI communication
infrastructure to support the needs of the DMS.
• Slightly more than one-half of survey participants indicated that they plan to monitor and
control distributed energy resources. In particular, these utilities plan to control
distributed generating resources; lower percentages planned to control available energy
storage and controllable loads (demand response).
• More than two-thirds of the respondents indicated that they plan to communicate directly
from the DMS to the DER. Slightly more than one-third of the respondents indicated that
the DMS communicates (or will communicate) with the DER via a separate, stand-alone
DER management system (DERMS). Approximately one-half of the participants (49%)
indicated that they will use or plan to use either Ethernet or radio frequency (RF)
communication facilities for this purpose.
• Most survey participants identified DNP3 an IEC61850 as their communication standards
of choice. This result is most likely attributable to the basic familiarity of the electric
utility industry with these established communication standards. As new DER-specific
standards continue to be developed, it is expected that use of these standards that have
been developed specifically for DER’s growing popularity among the electric utility
community will increase.
• The vast majority of survey participants indicated that they have no microgrid or plan to
have no microgrids or only one microgrid. A large percentage of survey participants
indicated that they are planning to deploy both island operation and grid-connected
applications. The most popular microgrid application is fault detection and isolation, in
which the microgrid may be converted to island mode upon loss of the supply from the
main electric utility.
• The majority of survey participants (more than 50%) are uncertain at this time whether
their proposed DMS facility should be CIP compliant. Some utilities (approximately 22%
of the surveyed participants) indicated that portions of the system, such as facilities to
control substation equipment that is classified as transmission, are often classified as
critical infrastructure.
• Survey participants expressed interest in monitoring and analyzing harmonics and
frequency/voltage amplitude deviation. The DMS should include applications to support
various power quality analysis needs, such as waveforms and fault recorder capabilities,
flicker analysis, and substation transformer derating that results from high harmonic
content.
• The biggest challenge that utilities have faced in DMS deployment has been in the area of
system integration. The DMS requires many interfaces to existing corporate computing
systems, including GIS, engineering analysis, AMI, OMS, and others. There is great
incentive for performing these activities in an effective and efficient manner.
B-25
• Training and change management are also major concerns, as has been the case in past
years. DMS implementation cannot be successful if end users (system operators) are not
trained to use the new system software and if well-established business practices are not
updated to address this new functionality.
• Keen interest was expressed during this survey in developing a business case and then
actually verifying that the benefits have been achieved. It is increasingly important to
show that the benefits that will be achieved by implementing the DMS significantly
outweigh the costs.
B-26
This page is intentionally left blank.

