
2023-2024 FIRST
®
Tech Challenge
Control System Troubleshooting

2 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Sponsor Thank You
Thank you to our generous sponsor for your continued support of the FIRST
®
Tech Challenge!
Volunteer Thank You
Thank you for taking the time to volunteer for a FIRST
®
Tech Challenge event. FIRST
®
and FIRST
®
Tech
Challenge rely heavily on volunteers to ensure events run smoothly and are a fun experience for teams and
their families, which could not happen without people like you. With over 6,500 teams competing yearly, your
dedication and commitment are essential to the success of each event and the FIRST Tech Challenge
program. Thank you for your time and effort in supporting the mission of FIRST!

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 3
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Revision History
Revision
Date
Description
1
9/21/2023
Initial Release
2
1/19/2024
Added Resetting a REV Control Hub WiFi Password ...................................... 63
Contents
Introduction ........................................................................................................................................................ 7
What is FIRST
®
Tech Challenge? .................................................................................................................. 7
Gracious Professionalism
®
................................................................................................................................ 7
FIRST Privacy Policy ......................................................................................................................................... 7
Volunteer General Information ........................................................................................................................... 7
Volunteer Training and Certification ............................................................................................................... 7
Volunteer Minimum Age Requirement ............................................................................................................ 8
Key Volunteer Role Minimum Age Requirement ............................................................................................ 8
Bring a Friend! ............................................................................................................................................... 8
Helping Teams Succeed ................................................................................................................................ 8
Control System Introduction .............................................................................................................................. 9
Point-to-Point Control ..................................................................................................................................... 9
Focus of this Document ............................................................................................................................... 10
Wi-Fi Technology ............................................................................................................................................. 11
Wi-Fi Direct Group Owner ............................................................................................................................ 11
Wireless Access Point .................................................................................................................................. 11
Programming Laptop.................................................................................................................................... 11
Configuration Activity ................................................................................................................................... 12
Accessing the Wi-Fi Direct Configuration Activity ..................................................................................... 13
Troubleshooting Wi-Fi Direct Connections ................................................................................................... 18
Is the Robot Controller On? ...................................................................................................................... 19
Are Both FIRST Tech Challenge Apps Installed? ..................................................................................... 19
Do Both FTC Apps Have the Same Version Numbers? ............................................................................ 19
Is Either Device Also Connected to Another Network? ............................................................................. 20
Are there Lots of Devices Trying to Pair Simultaneously? ......................................................................... 20
Monitoring and Troubleshooting the Wireless Environment ............................................................................. 21
The Wireless Spectrum ................................................................................................................................ 21
2.4GHz Portion of the Spectrum ............................................................................................................... 21
5GHz Portion of the Spectrum .................................................................................................................. 22
Monitoring the Wireless Spectrum ................................................................................................................ 22
Wi-Fi Analyzer.............................................................................................................................................. 22

4 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Mac OS Airport Utility ................................................................................................................................... 23
NetScout (formerly Fluke) AirCheck™ Wi-Fi Tester ..................................................................................... 24
MetaGeek inSSIDer ..................................................................................................................................... 25
Wireshark ..................................................................................................................................................... 25
Troubleshooting the Wireless Environment at an Event ................................................................................... 27
Ping Times ................................................................................................................................................... 27
Is the Wi-Fi Channel Too Busy? ................................................................................................................... 29
Potential Sources of Wi-Fi Interference ........................................................................................................ 29
Potential Sources of Non-Wi-Fi Interference ................................................................................................ 29
Are There Too Many Robots Operating on the Same Channel? .................................................................. 29
Is there a Wi-Fi Suppressor Operating in the Vicinity? ................................................................................. 30
Are the Wireless Radio Signals Being Blocked by Metal? ............................................................................ 30
Is There Malicious Activity Occurring? ......................................................................................................... 31
Determining if Wi-Fi Interference Warrants a Match Replay ......................................................................... 32
Scenario 1: High ping times for a robot ..................................................................................................... 32
Scenario 2: Robot Controller unexpectedly disconnects from the Driver Station ....................................... 32
Additional Thoughts on Recommending a Match Replay .......................................................................... 33
Accommodating a Large Number of Robots at an Event ................................................................................. 33
Wi-Fi Event Checklist ................................................................................................................................... 33
Distributing Robots Across Multiple Channels ................................................................................................. 34
Wi-Fi Channel Overlap ................................................................................................................................. 34
Factors to Consider when Selecting Wi-Fi Channels .................................................................................... 34
UnPairing Then Re-Pairing the Driver Station to the Robot Controller. ......................................................... 35
Changing the Channel Using an Approved Motorola Smartphone................................................................ 38
Mitigating Disruptions Due to Electrostatic Shocks .......................................................................................... 39
What is an Electrostatic Discharge Event? ................................................................................................... 40
How Does an ESD Event Disrupt a Robot? .................................................................................................. 40
How Robots Become Charged ..................................................................................................................... 40
Discharging a Robot .................................................................................................................................... 41
Modeling the System.................................................................................................................................... 42
Measuring Relative Humidity ........................................................................................................................ 44
Measuring Electrostatic Voltage ................................................................................................................... 46
Treating the Tiles to Mitigate Electrostatic Build-Up ..................................................................................... 47
Using Ferrite Chokes to Reduce Disruption Caused by an ESD Event ........................................................ 53
Isolating Electronics to Prevent Arcing with Frame ...................................................................................... 54
Cladding Exterior Metal Features of the Robot with Electrically Insulated Material ....................................... 56

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 5
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Ground the Electrical System to the Robot Frame through a Resistor .......................................................... 56
Troubleshooting Common Issues .................................................................................................................... 59
FIRST Tech Challenge Driver Station .......................................................................................................... 59
Gamepad is Not Recognized .................................................................................................................... 59
Gamepad Joysticks Were Not in Neutral Position When Connected to Driver Station .............................. 59
Mode Button on F310 Gamepad is Pressed ............................................................................................. 60
Gamepad Disconnects While Joysticks are in a Non Neutral Position During an OpMode Run ........... 60
Driver Station Goes to Sleep While OpMode is Running .......................................................................... 60
Driver Station Powers Off Unexpectedly ................................................................................................... 60
Unable to Find a Specific OpMode in the Driver Station’s List of Available OpModes .......................... 60
Gamepad Left Joystick is Not Working ..................................................................................................... 61
Robot Controller ........................................................................................................................................... 61
User Code Threw an Uncaught Exception: null ........................................................................................ 61
User Code Threw an Uncaught Exception: number XXX is invalid; .......................................................... 61
Unable to find a hardware device with the name “…” ................................................................................ 61
Common Programming Errors .................................................................................................................. 62
Neglecting to Insert waitForStart() Statement ............................................................................................... 62
Uninterruptible Threads ............................................................................................................................ 62
REV Robotics Control and Expansion Hubs ............................................................................................. 63
Resetting a REV Control Hub WiFi Password ........................................................................................... 63
Power Cycle Time .................................................................................................................................... 64
Logic Level Converters ............................................................................................................................. 64
5V Modern Robotics-Compatible Encoders .............................................................................................. 64
5V Modern Robotics-Compatible I2C Sensors .......................................................................................... 64
LED Blink Codes ...................................................................................................................................... 64
Troubleshooting Dual Expansion Hubs ..................................................................................................... 65
Useful Tips and Tricks ..................................................................................................................................... 65
Use a Pair of Android Devices to Monitor Wi-Fi Channel ............................................................................. 65
Use the Log Files to Help Troubleshoot Problems ....................................................................................... 65
Wireshark ........................................................................................................................................................ 66
Creating a Capture Filter for DEAUTH Packets ............................................................................................ 66
Viewing WLAN Traffic Statistics ................................................................................................................... 69
Getting Additional Help .................................................................................................................................... 71
Tech Tips on Using Log Files .......................................................................................................................... 71
Introduction .................................................................................................................................................. 71
Verify the Date and Time ............................................................................................................................. 71
The FIRST Tech Challenge Log Files .......................................................................................................... 71

6 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Viewing the FIRST Tech Challenge Robot Controller Log File ..................................................................... 72
Finding the Log Files .................................................................................................................................... 73
File Navigation .......................................................................................................................................... 73
Using Windows File Explorer to Locate the Log Files ............................................................................... 73
Viewing the Contents of the Log File ........................................................................................................ 75
Non-Windows Users ................................................................................................................................. 77
Using the REV Hardware Client Windows App to View Log Files ............................................................. 77
Using the Android Debug Bridge for Troubleshooting................................................................................... 77
“Shelling” into an Android Device .............................................................................................................. 78
Pulling a File from the Android Device ...................................................................................................... 80
Using Android Studio to View Log Messages ............................................................................................... 81
Creating Your Own Log Statements within an OpMode ....................................................................... 82
Example OpMode ................................................................................................................................ 82
Creating a logcat Filter in Android Studio .................................................................................................. 83
Appendix A – Resources ................................................................................................................................. 85
Game Forum Q&A ....................................................................................................................................... 85
Volunteer Forum .......................................................................................................................................... 85
FIRST Tech Challenge Game Manuals ........................................................................................................ 85
FIRST Headquarters Pre-Event Support ...................................................................................................... 85
FIRST Tech Challenge Event On-Call Support ............................................................................................ 85
FIRST Websites ........................................................................................................................................... 85
FIRST Tech Challenge Social Media ........................................................................................................... 85
Feedback ..................................................................................................................................................... 85
FIRST
®
Tech Challenge CSA Troubleshooting Manual | 7
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Introduction
What is FIRST
®
Tech Challenge?
FIRST
®
Tech Challenge is a student-centered program that focuses on giving students a unique and
stimulating experience. Each year, teams engage in a new game where they design, build, test, and program
autonomous and driver operated robots that must perform a series of tasks. To learn more about FIRST
®
Tech
Challenge and other FIRST
®
Programs, visit www.firstinspires.org.
Gracious Professionalism
®
FIRST
®
uses this term to describe our programs’ intent.
Gracious Professionalism
®
is a way of doing things that encourages high-quality work, emphasizes the
value of others, and respects individuals and the community.
Watch Dr. Woodie Flowers explain Gracious Professionalism in this short video.
Learn more about the roles of volunteers on our Volunteer Resources page, “Volunteer Role Descriptions”.
FIRST Privacy Policy
FIRST takes the privacy of our community seriously. As a nonprofit and a mission-driven youth-serving
organization, we are compelled to understand who we are serving, how our programs are performing, and
make improvements so that we can achieve our goals of making FIRST accessible to any youth who wants to
be part of the fun, exciting and life-changing experience. Thus, we need to collect certain personal data from
participants and volunteers to ensure we are meeting our goals and responsibilities as a youth-serving
nonprofit organization.
As a volunteer, you may be asked to handle the personal data, or personally identifiable information (PII), of
coaches, team members, and even other volunteers. It is critical that you understand and follow the FIRST
Privacy Policy and complete any data protection and privacy training required by your role. If you have any
questions regarding data protection and privacy, please reach out to the FIRST Data Governance Team at
privacy@firstinspires.org.
Volunteer General Information
Volunteer Training and Certification
How to Access BlueVolt After Certifications are Complete:
Once you complete your certifications, you will no longer see a “Roles Missing Certification” link or a link to
“Review outstanding Tasks” to get to BlueVolt. If that is the case, follow the steps below to access BlueVolt
courses and updates.
1. Login to your FIRST Dashboard
2. At the top right of the page, click on the dropdown under your name and go to “My Profile.”
3. Once there, on the left menu of the page, click on the “Certifications” link which will take you to the
BlueVolt site where you can view/print your existing certifications and sign up for new training.
8 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
If you have applied for a role but do not see the link to training in your dashboard, or you have other training
related questions please email FTCTrainingSupport@firstinspires.org.
Volunteer Minimum Age Requirement
The minimum age requirement of a FIRST volunteer is 13 years old.
A minor must have a parent or guardian give written permission to volunteer. In addition, the FIRST Consent
and Release Forms will need to be signed by a parent or guardian in the Volunteer Registration system for any
volunteer under age 18.
Key Volunteer Role Minimum Age Requirement
Volunteers MUST be at least 21 years old before they can serve in a key volunteer role for the FIRST Tech
Challenge. Key volunteer positions include: volunteer coordinator, head referee, judge advisor, field supervisor
FIRST technical advisor, lead robot inspector, lead field inspector, and lead scorekeeper. Local program
delivery partners can make case by case exceptions to these guidelines by contacting FIRST for approval.
Bring a Friend!
Volunteers are a huge part of the FIRST Tech Challenge Program and continuing to inspire students to seek
out careers in science, technology, engineering, and math (STEM). FIRST Tech Challenge needs your help in
recruiting new volunteers to keep our programs thriving for future generations! If you have a friend or co-worker
you think would be interested in volunteering at an event, there are just a few simple steps to help get them
involved!
1. Check out our full list of volunteer opportunities online!
2. Have them apply for the Event in the Volunteer Registration System. Volunteers must be screened
before volunteering.
3. Have them contact Firsttechchallenge@firstinspires.org with any questions they may have.
Helping Teams Succeed
A volunteer's role is about helping a team succeed so they can compete. Teams spend countless hours,
weeks and sometimes months working and reworking their robot design and strategies. After all this effort,
some teams will still need a friendly volunteer to help create a positive event experience for the students.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 9
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Control System Introduction
The FIRST Tech Challenge uses an Android-based Control System for its robot competition. This document
provides tips and recommended procedures for avoiding potential problems with the Android-based Control
System. It also provides information to help troubleshoot and resolve common problems with the system.
Point-to-Point Control
The Control System that is used for the FIRST Tech Challenge competitions uses a point-to-point
communication model. Each team has an Android device that acts as a Driver Station (or DS). The Driver
Station establishes a secure and unique wireless connection with a second Android device that is mounted on
the robot, and which is known as the Robot Controller (or RC).
Figure 1 – Each DS-RC pair has its own unique wireless connection.
With the Android-based Control System, it is the teams that are responsible for bringing, maintaining, and
troubleshooting the wireless Control System for their robot. At an event, each team will have a Driver Station
and a Robot Controller. The two components will be paired with a secure and unique wireless connection.
Figure 2 - Each Team will have its own DS, RC and wireless network connection.
WiFi Access Point

10 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Early versions of the FTC control system used an Android smartphone as the primary controller. This Android
device was connected to an input/output (I/O) module through a USB connection. Most teams use the Control
Hub as the primary controller. The Control Hub has a built-in Android device and is connected to the I/O
module through an internal serial connection.
Figure 3 - A Control Hub is a Robot Controller with an internal Android device.
Starting with the 2021-2022 season, the REV Driver Hub is approved for use as the Driver Station instead of
an Android smartphone. The Driver Hub has built-in 2.4 and 5GHz Wi-Fi enabling the ability for wireless
connection to a robot with additional security through 802.11w. The REV Driver Hub can configure a REV
Control Hub (directly) or Expansion Hub (via Control Hub or RC phone).
Figure 4 - Expansion Hub or Control Hub configured with REV Driver Hub (shown).
Focus of this Document
Although teams will be responsible for providing and maintaining their Robot Control System, they may
occasionally encounter problems which require assistance from a FIRST Technical Advisor (FTA), Control
System Advisor (CSA), and/or a Wi-Fi Technical Advisor (WTA). Also, there are steps that an Event Host, FTA,
CSA, and/or WTA can take before and during an event to help mitigate wireless issues with the Control
System.
This document provides information on steps that can be performed before and during a FIRST Tech
Challenge competition to help ensure that the wireless systems run smoothly. This document also provides tips
on how to diagnose/troubleshoot commonly encountered problems.
This document is not intended to teach users how to operate the FIRST Tech Challenge Control System. This
document assumes that the reader has a basic understanding on how to configure and use the components of
the system. For information on how to use the Android Control System, please visit the FIRST Tech Challenge
Programming Resources web page and view the training documents listed. Also, REV Robotics, the
manufacturer of the Driver Hub, Control Hub and Expansion Hub, has excellent online documentation including
detailed instructions on using and troubleshooting the Control Hub, Expansion Hub and Driver Hub.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 11
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Wi-Fi Technology
The Driver Station and Robot Controller are Android devices that run special FIRST Tech Challenge apps to
create a unique and secure wireless connection between the two devices. For this connection, the REV
Control Hub uses Wireless Access Point (WAP) technology, while the standalone phone-based Robot
Controller uses Wi-Fi Direct (P2P) technology. There are some minor, subtle differences between how these
two technologies connect the devices together wirelessly. Note that the FTC Driver Station app is able to
connect to both types of Robot Controllers.
Wi-Fi Direct Group Owner
For a Wi-Fi Direct P2P connection, one of the peer-to-peer devices acts like a Wi-Fi access point and is
referred to as the group owner. The group owner establishes a Wi-Fi Direct group that the other devices can
connect to. The other peer-to-peer device is referred to as the client device. For the FIRST Tech Challenge
application, the Robot Controller phone is the device that acts as the group owner for the P2P connection. The
Driver Station device is the client device, and it connects to the Wi-Fi Direct group through the FTC Driver
Station app using Android’s P2P technology. A Wi-Fi Direct connection requires that a user manually accept
(using the P2P group owner’s touch screen) the initial connection request from a P2P client.
Figure 5 - The P2P group owner is analogous to a Wi-Fi access point.
Wireless Access Point
A Control Hub is slightly different from a phone-based Robot Controller. A Control Hub acts as an actual
wireless access point. A Driver Station device connects to the Control Hub’s Wi-Fi network like it would to any
other Wi-Fi network. The user only needs to provide the correct password in order to access the wireless
network – no manual acceptance step on the access point is required.
Programming Laptop
During a typical FIRST Tech Challenge match, only a team’s Driver Station is connected to the Wi-Fi Direct
Group or the wireless access point (WAP) that is established by the team’s Robot Controller. Away from the
competition field, however, a team might have additional devices connected to this Wi-Fi Direct Group. For
example, when a team edits an OpMode using the FTC Blocks Development Tool or the FTC OnBot Java
Development Tool, their developer’s laptop will also be connected to the Robot Controller’s wireless network.

12 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 6 – A team might also have a developer’s laptop connected when they are away from the competition field.
Note that the wireless connection between the developer’s laptop and the Robot Controller does not violate the
prohibition in the game rules on teams setting up their own wireless network. For this case, the developer’s
laptop is connected to the existing Wi-Fi Direct Group or wireless access point that is also used by the Driver
Station to communicate with the Robot Controller.
Configuration Activity
The Android operating system has a built-in configuration screen or activity that can be used to view and
configure the Wi-Fi Direct settings.
Note: that for the FIRST Tech Challenge apps, you typically do NOT want to use the Android Wi-Fi Direct
menu to pair your devices. Instead, you should use the Pair with Robot Controller activity that is available
from the Settings menu of the FTC Driver Station app to pair/unpair your devices.
It is useful to be familiar with Android’s Wi-Fi Direct configuration activity. As an FTA/CSA you might need to
use this screen to check on the configuration of an Android device, and to clear/erase remembered groups or
do other tasks to help get a robot back in action.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 13
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Accessing the Wi-Fi Direct Configuration Activity
On your Android device, launch the Settings activity then click on the Wi-Fi item.
Figure 7 - Launch the Settings menu. Figure 8 - Click on "Wi-Fi".
To access the Wi-Fi Direct menu, touch the three dots in the top right-hand corner of the screen to display a
short pop-up menu. Select Advanced from the pop-up menu.
Figure 9 - Click on the 3 dots. Figure 10 - choose Advanced.

14 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
In the Advanced Wi-Fi menu, select Wi-Fi Direct. Note that the screenshots in this document were generated
using a Moto e4 phone running Android 7.1.1. The screen images and menu text might vary from device to
device.
Figure 11 - select Wi-Fi Direct.
This screen shows the Wi-Fi Direct group name, if any, along with any connected device(s) and remembered
group(s). When troubleshooting, it is usually best to clear all the items that this screen will allow. Sometimes
the “connections” listed here have become corrupted. Clearing connections here, and re-establishing later
(from the FTC Driver Station app), is a fast, simple and reliable way to ensure good communications.
Note: that the Wi-Fi Direct group cannot be renamed at this stage. All connections must be cleared first. Also
note, you should request and be granted permission from the team before you clear any Wi-Fi Direct groups.
To begin, touch one of the remembered group names, then click OK to forget that group. Repeat for any other
remembered groups listed.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 15
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 12 - Touch any group name(s). Figure 13 - Forget each group.
Next, do the same thing with any peer devices and the Created Group.
Figure 14 - Peer Devices. Figure 15 - Created Group.

16 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Touching either of these items brings up the following “Disconnect?” screen – select OK. If one of these items
cannot be disconnected after several tries, continue with the other items. A persistent item like this will
generally not cause a problem later.
When the disconnecting is complete, the screen will list only the Device Name, which was also the Wi-Fi Direct
Group Name.
Figure 16 - Select OK to disconnect. Figure 17 - All clear.
In this disconnected state, the Device Name can be changed. Touch the 3 dots again at the top right corner.
Now the Configure Device selection is live and can be clicked.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 17
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 18 - Configure device. Figure 19 - Rename device.
Device naming must follow the rules described in the FTC Game Manual Part 1.
At this screen, Motorola phones offer three features not present on previous FTC phone models.
The maximum number of connections can be specified, ranging from 2 to 8. A smaller number is safer and
more efficient, while a larger number could allow (for example) multiple Blocks or OnBot Java programmers to
access a single shared RC device. Users must be very careful to avoid conflicts in sharing and editing.
The other two items allow selection of a Wi-Fi Direct inactivity timeout, and whether or not to automatically
connect to a remembered Wi-Fi Direct group when discovered. You can make selections here, but in general,
the FTC apps will manage connections, as needed.

18 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 20 - Optional settings.
Click Save when done, and return to the home screen. Make new connections only from the FTC Driver
Station app, as described in the following section.
Troubleshooting Wi-Fi Direct Connections
Ideally, the teams should be able to use the Pair with Robot Controller activity of the FTC Driver Station App
to pair to the target FTC Robot Controller. Once the devices have been paired through the FTC Driver Station
app, they should automatically reconnect to each other when both devices are turned on and both devices
have their respective FTC apps running.
Figure 21 - When the Driver Station is connected, it displays useful status info.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 19
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
When your Driver Station is able to connect to the Robot Controller successfully, it will display useful status
information (see Figure 21) on its screen including the name of the device that it is connected to, the average
ping times between the Driver Station and Robot Controller and voltage info for the Robot Controller
smartphone (if used) and the main robot battery.
Is the Robot Controller On?
For problems connecting to the Robot Controller, check the following basic items:
● Is the Robot Controller device turned on?
● Is the Robot Controller smartphone in Airplane mode with Wi-Fi enabled?
Smartphone specific:
o Is the Robot Controller device running the FTC Robot Controller app?
o Is the FTC Robot Controller app in the foreground (and NOT minimized)?
o The Robot Controller device must be powered on and have the FTC Robot Controller app
running before the Driver Station can connect to it.
Are Both FIRST Tech Challenge Apps Installed?
If you are having problems pairing the Android devices, please make sure that you do not have the FTC Driver
Station app and the FTC Robot Controller app installed at the same time on a single Android device. The apps
have the potential to cause Wi-Fi Direct conflicts if they are both installed. Make sure neither device has both
apps installed at the same time.
Do Both FTC Apps Have the Same Version Numbers?
If you have verified that the Robot Controller and the Driver Station are turned on and have their respective
FTC apps running, verify that the apps have compatible version numbers. If you select the About menu item
for each app, a new screen should appear on the Android device with version information about the app. It is
most important that the “Robot Wi-Fi Protocol Version” numbers of the FTC Robot Controller app and the FTC
Driver Station app match. For example, if the Robot Controller has a “Robot Wi-Fi Protocol Version” number of
v4 but the Driver Station only has a “Robot Wi-Fi Protocol Version” number of v3.5, then the two apps might be
unable to connect and communicate with each other, due to the difference in the versions.
Figure 22 - The Robot Wi-Fi Protocol Versions should match for the Robot Controller (left) and the Driver Station (right).

20 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
If the “Robot Wi-Fi Protocol Version” numbers do not match, then one of the apps should be downgraded or
upgraded so that the numbers will match. Often it is advisable to upgrade, however, in some instances, a team
might feel more comfortable downgrading to a previous, stable version of the app. Minimum required levels of
FTC app versions are specified in the FTC Game Manual Part 1 and its updates. The FTC Game Manual Part
1 specifies a minimum required app version level and the major and minor version numbers for the DS and RC
apps must be the same.
Is Either Device Also Connected to Another Network?
For the FIRST Tech Challenge competitions, we recommend that the Driver Station and Robot Controller
devices are not connected to any other networks other than each other. It is possible and often desirable to
connect your Android to an alternate wireless network:
● Teams like to use the wireless ADB mechanism0F
1
to debug their apps.
● Teams might need to connect to a wireless network to download something to their phone from the
Internet.
● Teams might have used the Android device to check their e-mail or look up something on the Internet
(we do not recommend doing this).
We also recommend that the teams forget any other Wi-Fi or Wi-Fi Direct network, except for primary Wi-Fi
Direct connection between the Driver Station and Robot Controller (this applies only to the use of smartphone
as the Robot Controller).
If a team’s Driver Station is having trouble connecting to the Robot Controller, check the following,
● Check to see if either Android device is connected to another Wi-Fi or Wi-Fi Direct device.
● If either Android device is connected to another wireless network, disconnect the device from the other
network, forget the other network, and restart the Driver Station and Robot Controller apps.
Are there Lots of Devices Trying to Pair Simultaneously?
Before an Android device can connect to another device, it will scan the wireless spectrum to determine what
Wi-Fi Direct enabled devices are available in the vicinity. This discovery process can be negatively affected if
there is a high concentration of Wi-Fi Direct devices in the vicinity that are also scanning the spectrum for
available devices. For instance, if there are many devices in the vicinity, the target device that you are trying to
connect to ( “12345-A-RC" for example) might not be visible in your list of available Wi-Fi Direct devices on
your Android phone.
If you are at an event and the Android devices are consistently unable to find each other, or if the devices have
trouble establishing a connection, it could be due to the presence of so many other Wi-Fi Direct enabled
devices. If this is the case, one option would be to remove the pair of devices that you are trying to connect
away from the crowd, and pair the two devices further away so that the other devices do not interfere with the
discovery and pairing process.
Another option is to turn off the Android devices in the vicinity, and then have the teams turn on and pair their
devices in successive small groups of no more than four teams or eight devices at a time. A wait time of a few
minutes between each small group is recommended.
Once the devices are connected, they can withstand a reasonable amount of wireless traffic and noise
and still operate reliably. This means that once a team has been able to pair/connect its Android devices, the
1
See http://developer.android.com/tools/help/adb.html#wireless for details on wireless use of the Android debug bridge (ADB).

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 21
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
team should be able to use the devices, even if there are a relatively high number of other devices operating in
the vicinity.
Monitoring and Troubleshooting the Wireless Environment
The FIRST Tech Challenge Control System uses Wi-Fi Direct and/or Wireless Access Point technology to
connect the Driver Station device to the Robot Controller. Wi-Fi Direct networks can be managed like normal
Wi-Fi networks. The techniques and tools that you might use to monitor and troubleshoot a corporate Wi-Fi
network can be applied to the Wi-Fi Direct networks used by the FTC Control System. This chapter provides
some basic information to help the FTA/CSA/WTA keep the wireless environment clean and operational at an
event.
The Wireless Spectrum
Wi-Fi enabled devices use wireless radios to send digital information back and forth to each other. These
devices operate at specific frequencies within legally allocated portions of the wireless spectrum. All FTC-
approved Android devices can operate at the 2.4GHz and 5GHz frequencies.
2.4GHz Portion of the Spectrum
In the U.S., there is a band of 11 channels (1 through 11 in Figure 23 shown below) in the 2.4GHz region that a
Wi-Fi enabled device can use to communicate. Other regions outside of the U.S. often allow Wi-Fi devices to
operate on a few additional channels.
Figure 23 – In the U.S., there are 11 Wi-Fi channels in the 2.4GHz band. Other countries allow a few additional channels.1F
2
For the 2.4GHz portion of the spectrum, although there are 11 (or more) operating channels that are available
to use, you can see in Figure 23 that the adjacent channels overlap each other. This means that if you have
two devices operating on wireless channels that are not separated by 5 channel “widths”, then the radios from
each device will interfere with each other.
Ideally, if you want to avoid interference between two channels, you should make sure there is at least a 5-
channel width separation in between the two channels. For example, channels 1 and 6 have enough spacing in
between so they will not interfere with each other. However, channels 1 and 5 overlap slightly and there will be
some interference between the two overlapping channels.
In practice, a little bit of overlap between the channels might be OK. If one or more channels in the spectrum is
very noisy and unusable at an event, then you might have to consider moving your devices to alternate,
possibly overlapping channels.
2
This diagram was copied from Wikipedia (https://en.wikipedia.org/wiki/List_of_WLAN_channels#/media/File:2.4_GHz_Wi-
Fi_channels_(802.11b,g_WLAN).svg) on 9/20/15.

22 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Each wireless channel can only support a limited number of devices operating on the same channel. As the
number of devices that are operating on a channel increases, the amount of noise and interference on that
channel increases.
The FTC Driver Station and FTC Robot Controller apps can tolerate a fair amount of noise and interference.
This means that it is usually possible to support a relatively large number (25 to 35 or even more) Driver
Station-Robot Controller pairs on a single 2.4 GHz Wi-Fi channel. However, if there are other sources of traffic
on a Wi-Fi channel (including non-Wi-Fi enabled devices) then the wireless connectivity of the Driver Station-
Robot Controller pairs can suffer.
5GHz Portion of the Spectrum
FTC-approved smartphones and the REV Robotics Control Hub and Driver Hub support both the 2.4 and 5
GHz bands. The 5GHz band channels have the advantage that they do not overlap each other. Also, 5GHz
channels offer greater bandwidth and have more limited range (which can be useful in a crowded competition
venue with lots of robots) than 2.4GHz channels. Note: that the FIRST Robotics Competition (FRC) robots
exclusively compete on the 5GHz portion of the spectrum. For events that have both FTC and FRC matches,
the event organizers should make sure to allocate distinct channels for the FRC robots and distinct channels
for the FTC robots. This will make it easier to manage and troubleshoot the spectrum at these events.
Monitoring the Wireless Spectrum
There are some tools that are available to an FTA, CSA, or WTA that can be helpful in monitoring activity on
the wireless spectrum.
Wi-Fi Analyzer
Wi-Fi Analyzer is a free app that is available on the Google Play store that you can install onto your Android
device. https://play.google.com/store/apps/details?id=com.farproc.Wi-Fi.analyzer&hl=en
Wi-Fi Analyzer lets you see what wireless networks are operating in your venue. The app has a very useful
graphical display that shows the available networks and overlays the networks onto a graph that shows the
operating channels for each network. The app also displays the relative strength of each network.
Figure 24 - Wi-Fi Analyzer screen shot.2F
3
3
Image taken from the Google Play listing for Wi-Fi Analyzer.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 23
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
An FTA, CSA, WTA, or Tech Director can use the Wi-Fi Analyzer tool to see which networks are present at a
venue. If there are some unauthorized wireless networks on a channel, the FTA, CSA, or WTA might be able
to identify them using Wi-Fi Analyzer. Wi-Fi Analyzer can also be used to determine which wireless channel a
team’s Driver Station-Robot Controller pair is using.
Note: that if you run the Wi-Fi Analyzer app on an Android device that has a dual-band (2.4GHz and 5GHz)
radio, then you can monitor channels on the 2.4GHz and 5GHz bands.
An FTA, CSA, WTA, or Tech Director can also use the app to help plan which channels the teams should use
for their robot communication. In general, the robots should operate on the Wi-Fi channel with the least number
of other wireless networks on that channel (assuming there are not any other sources of interference on that
channel).
While the Wi-Fi Analyzer app is a helpful tool, it does have some limitations:
● Wi-Fi Analyzer will not display any activity from non-Wi-Fi signals operating on the same frequency.
For example, if someone is operating a wireless microphone system at the venue, the microphone
might be transmitting on the same frequency (2.4GHz) as the FIRST Tech Challenge devices. Wi-Fi
Analyzer does not have the ability to detect and display non-Wi-Fi activity so it would not be able to tell
if there was interference from something like a wireless microphone.
● Wi-Fi Analyzer only lists wireless networks and the relative signal strength of each network. It does not
provide any information on how much activity is occurring on a network. An Event Host can use the
app to see what Wi-Fi networks are operating on a channel, but the Host cannot determine if any of the
networks are very busy and use up a lot of the available capacity on a channel.
● Wi-Fi Analyzer will not display any hidden Wi-Fi networks that might be operating on a channel.
Typically, when someone sets up a wireless network, they have the option of hiding the network. The
Wi-Fi Analyzer app will not list a hidden Wi-Fi network.
Mac OS Airport Utility
If you have access to a Mac OS computer, you can use the airport utility function to scan for locally available
wireless networks. To use the airport utility, you must have the airport executable file included in your Mac OS
shell’s search path. You can also place a symbolic link to the airport utility in the /usr/local/bin folder of your
Mac’s file system. From a Mac OS command terminal, you can use the following command to create the
symbolic link (note you will need to use super user status and provide your account’s password to create the
link): sudo ln -s /System/Library/PrivateFrameworks/Apple80211.framework/Versions/Current/Resources/airport /usr/local/bin/airport
From a Mac OS command terminal, if you type in the following command
airport --scan
The computer will conduct a scan of the wireless environment and list available local networks that it detected.
Figure 25 – The command “airport –scan” will list available visible Wi-Fi networks.
The airport --scan utility has similar limitations to the Wi-Fi Analyzer app described in this document. Also, this
command line argument does not run continuously. A user must repeatedly issue the command (or write a
script to do so) to get a continuous listing of available Wi-Fi networks.

24 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
NetScout (formerly Fluke) AirCheck™ Wi-Fi Tester
A company called netAlly (formerly NetScout and Fluke) makes an expensive, but powerful wireless network
monitoring tool. The netAlly Aircheck™ Wi-Fi Tester is a handheld device that can be used to monitor the
wireless spectrum at an event. Details regarding the Aircheck G3 Pro device can be found on the netAlly
website:
https://www.netally.com/products/aircheck/
The netAlly AirCheck G3 Pro and the older Fluke AirCheck devices are similar to, but even more powerful than
the previous tools that we have listed. The Aircheck can display information about any wireless network in the
vicinity. Unlike the Wi-Fi Analyzer app and the Apple airport utility, these devices also provide information
about hidden wireless networks.
Figure 26 – netAlly AirCheck G3 Pro and the older Fluke Aircheck™ Wi-Fi Tester.
Unlike the Wi-Fi Analyzer app, the AirCheck monitor can also tell the user how much wireless activity (both Wi-
Fi and non-Wi-Fi) is occurring on a specific wireless channel. The AirCheck monitor can estimate how much of
the channel's capacity is being consumed. This can help an FTA/CSA/WTA determine if a wireless channel is
“clean” or “noisy.”
It is important to note that the AirCheck monitor measures both Wi-Fi and non-Wi-Fi activity on a wireless
channel. This feature can be useful for determining if other non-Wi-Fi devices (such as a wireless audio-visual
system or a Bluetooth device) are affecting the Wi-Fi connections on a specific channel.
The Aircheck can be equipped with an external directional antenna. The external antenna can be helpful in
locating the source of a wireless signal. An FTA/CSA/WTA can use the antenna to monitor the strength of a
wireless signal. The signal strength will increase as the antenna is pointed at the source of the signal.
Figure 27 – The Aircheck™ can be equipped with an external antenna.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 25
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
MetaGeek inSSIDer
A company called MetaGeek makes software and hardware devices for Windows computers and smartphones
that provide similar capabilities to the Fluke monitor at a slightly lower price. MetaGeek’s inSSIDer software
with their Wi-Spy Mini or DBx hardware combined with a Windows computer can be used to monitor wireless
channels and see Wi-Fi and non-Wi-Fi traffic on the wireless spectrum. The MetaGeek Wi-Spy Air hardware
connected to a smartphone provides similar Wi-Fi scanning capability in a more portable configuration.
Figure 28 - MetaGeek's inSSIDer software with the Wi-Spy Mini or DBx hardware shows Wi-Fi & non-Wi-Fi activity.
Details regarding Wi-Spy Air, inSSIDer and the Wi-Spy Mini and Wi-Spy DBx hardware can be found on the
MetaGeek website: http://metageek.com
The MetaGeek software and Wi-Spy Mini or DBx hardware require a laptop running Windows 10 to operate.
Wireshark
There is a free software application called Wireshark which can be used to help monitor and diagnose wireless
issues. Wireshark is a powerful tool that requires specialized knowledge to operate.
Details on how to install and operate Wireshark can be found at the following website:
https://www.wireshark.org/
Explaining how to use Wireshark is beyond the scope of this troubleshooting guide. This part of the document
provides instructions on how to use Wireshark to look for some specific problems with your wireless network.
However, for detailed instructions on how to use Wireshark, consult the Wireshark website.
Wireshark is a tool that lets you capture and analyze the wireless packets that are being sent through the
airwaves. To be able to use Wireshark to capture these wireless packets, you need to have a specially
equipped computer. To be able to capture the wireless packets in your venue, your computer must support
monitor mode operation for your wireless adapter.
Normally, when your computer’s wireless card receives a wireless packet, it looks at the destination address of
the packet. If the packet is not addressed to the computer’s wireless adapter, then it will ignore the packet. If
your computer is set up so that it can operate in monitor mode, then the wireless adapter will capture all the
wireless packets that it receives, regardless of the destination address of the packets.
Wireshark can be installed on Mac, Linux, and Windows computers. Not every computer, however, supports
monitor mode for their wireless adapters. Most Windows PCs do NOT allow for monitor mode. You can
purchase an external wireless adapter (that connects through the USB port of the computer) to use Wireshark
with a Windows PC (consult the Wireshark website for details).

26 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Apple Mac computers support monitor mode operation of their wireless adapters. If you have a Mac computer
you can install and run Wireshark in monitor mode. You do not need any special hardware to support monitor
mode on a Mac OS machine.
For the Linux operating system, some, but not all, wireless adapters have drivers that support monitor mode
operation. If you are a Linux user, you might need to consult the Wireshark documentation, as well as the
Linux documentation to determine if your setup supports monitor mode.
Figure 29 – Wireshark is a powerful tool, but it requires special knowledge and a Wi-Fi adapter that supports monitor mode.
If you do have a computer that supports monitor mode operation, then you can use Wireshark to capture and
analyze samples of wireless packets at your venue:
1. With Wireshark you can examine the retry rate for a wireless network. Every Wi-Fi packet that has a
specific destination address is supposed to be acknowledged by its target recipient. If the packet is
not acknowledged, then the sender will attempt to retransmit the packet to the recipient. The retry rate
is a ratio of retry packets to the total number of packets. The retry rate for a Wi-Fi network is an
indicator of connection quality. As the retry rate increases, the Wi-Fi connection quality tends to
decrease. Under ideal conditions (only one pair of wireless devices, no external interference, devices
are stationary and relatively close to each other, the devices are equipped with quality radios and
antennas) the retry rate should be around or under 5%. However, in practical conditions, the observed
retry rates typically will be much higher (10% to 40%). In general, a lower measured retry rate
corresponds to a clean wireless environment. If your observed retry rates are constantly hovering
around or above 35% then your wireless channel might have a lot of interference and/or excessive
traffic.
2. You can use Wireshark to examine the wireless data to look for evidence of problems such as a
DEAUTHENTICATION attack or a malformed Wi-Fi Direct probe response.
3. You can use Wireshark to see what Wi-Fi devices are transmitting in or near your venue (although
other tools like the Fluke Aircheck meter or the MetaGeek inSSIDer software might be better suited for
this task).

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 27
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Troubleshooting the Wireless Environment at an Event
If you are at an event and you suspect that there might be wireless interference that is causing problems
then there are some things that you can look at to try and diagnose the problem.
Ping Times
If you are at a FIRST Tech Challenge event, you can use the ping time feature of the FTC Driver Station app
as an indicator of network quality. When a Driver Station is connected to a Robot Controller, it will periodically
send a heartbeat packet to the Robot Controller. The Robot Controller is supposed to respond to each ping
and send an acknowledgement packet (aka “ACK”) back to the Driver Station.
The Driver Station constantly measures the amount of time that it takes to send a heartbeat packet to the
Robot Controller and to receive an acknowledgement packet back from the Robot Controller. This amount of
time is known as the ping time.
Figure 30 - Ping time represents the time it takes for a packet to be sent to and acknowledged by the Robot Controller.
Whenever a Driver Station is connected to a Robot Controller, the average ping time is displayed in the upper
right-hand corner of the FTC Driver Station app (see Figure 30).

28 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 31 - The average ping time is displayed in the upper right-hand corner (highlighted in yellow in this image).
The average ping time can be used as an indicator of connection quality for a Driver Station-Robot Controller
pair. If the wireless connection between the Driver Station and the Robot Controller does not have a lot of
noise, traffic, or interference, then the average ping time is generally smaller. If the noise, traffic, or
interference increases, then the Wi-Fi devices on a channel tend to resend packets more frequently, which
causes the average ping time to increase.
At an event, an FTC/CSA/WTA should have access to a pair of Android devices (preferably an Android device
that supports Wi-Fi channel changing through the FTC Robot Controller app) that they can use to monitor the
wireless connection quality on a Wi-Fi channel at the venue. If the ping time is low (on the order of 5 msec or
less) then the wireless connection quality is very good (exceptional). If the observed ping time hovers at a high
value (such as 250 msec or more) then the wireless connection quality is poor and the FTA/CSA/WTA should
try and identify the cause of the poor connectivity.
Note: that the average ping time only provides a measure of quality for the operating Wi-Fi channel. It does
not indicate quality for the entire set of channels. For example, if you have a pair of devices that are operating
on channel 1, the ping times observed for this pair of devices is primarily useful for monitoring the wireless
quality of channel 1. If you wanted to measure the wireless quality for channel 6 or 11, then you would have to
change the operating channel for your devices, reconnect them, then look at the ping times for the newly
selected channel.
If a team is encountering issues with communicating with their robot, look at the ping times on their Driver
Station to determine if the Robot Controller has a responsive connection (ping times less than 50 msec,
preferably on the order of 5 msec).
Using the average ping time is a convenient way to determine if the wireless channel is clear and relatively
noise-free. If the ping times are low, then the channel is most likely free of other Wi-Fi and non-Wi-Fi traffic.
Important Note: the observed ping time is also affected by the availability of the Robot Controller to respond
to the heartbeat messages from the Driver Station. If the Robot Controller is busy (for example, because it is
blocking in a portion of an improperly written OpMode) and it is unable to respond in a timely manner to the
Driver Station, the observed ping times will be higher, even if the wireless connection is strong.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 29
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Is the Wi-Fi Channel Too Busy?
In addition to ping times, an FTA/CSA/WTA can use other tools, such as the Aircheck meter or the MetaGeek
inSSIDer application, to get a more detailed view of the wireless activity on a Wi-Fi Channel. If you are at an
event and you have access to a device like the Aircheck meter, then you can examine the activity level for
each wireless channel and determine if a channel is being saturated.
Figure 32 - The Aircheck meter shows Wi-Fi (light blue) & non-Wi-Fi (gray) activity on each channel.3F
4
In Figure 32, you can see the Wi-Fi (shaded in light blue) and non-Wi-Fi (shaded in gray) activity on each Wi-Fi
channel. You can see that channel 3 in the example has a lot of non-Wi-Fi (gray) activity and that the channel
is very busy. You can also see that channel 7 has less activity and is not very busy.
Also note that adjacent Wi-Fi channels for the 2.4GHz band overlap, so activity on one channel might have a
negative effect on activity of a nearby channel.
If you notice high activity levels, then you can try to find and disable the devices that are causing the
interference. You can also try to move the Driver Station-Robot Controller devices to a different, less busy
channel.
Potential Sources of Wi-Fi Interference
Potential sources of Wi-Fi interference include the following:
● Wireless access points that belong to the venue (such as an access point used to provide wireless
access within a school).
● Unauthorized team or spectator access points.
● Mobile hotspots.
● Wi-Fi enabled cameras or other devices (such as Game Boy consoles, etc.).
Potential Sources of Non-Wi-Fi Interference
Potential sources of non-Wi-Fi interference include the following,
● Bluetooth devices (which also operate in the 2.4GHz band of the spectrum).
● Wireless audio/visual systems (including wireless microphones and cameras).
● Cordless telephones and headsets.
● Remote control cars, helicopters, drones, and planes.
● Microwave ovens.
Are There Too Many Robots Operating on the Same Channel?
Related to a channel being too busy, if there are too many robots operating on a channel, then the average
wireless connection quality might suffer. FIRST has done stress testing where we had a high number of Driver
4
Image from the Fluke website (http://www.flukenetworks.com/enterprise-network/network-testing/AirCheck-Wi-Fi-Tester) downloaded
on 9/21/15.

30 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Station-Robot Controller devices operating reliably on a single Wi-Fi Channel. We could operate close to 50
pairs on a single 2.4GHz Wi-Fi channel. However, in practice, the number of robots that can operate on a
single channel will vary with a variety of factors. If there is a lot of external wireless interference on a channel,
then the number of robots that can operate on a channel will decrease.
If you are at an event and you suspect that there are too many robots operating on a single channel, you can
try to distribute the robots evenly across available, less busy channels. Ideally, the 2.4GHz channels should be
spaced at least 5 channel-widths apart, to avoid any overlap. However, if necessary, you can move robots to
overlapping channels.
Is there a Wi-Fi Suppressor Operating in the Vicinity?
Many IT organizations use Wi-Fi suppressors to suppress any unauthorized Wi-Fi access points operating in a
venue. These suppressors have a list of authorized wireless networks that can operate within the venue. If the
suppressors detect an unauthorized wireless network, it will send out packets to disrupt the operation of the
unauthorized network. Many of these suppressor functions are built-in to modern wireless access points.
Each Driver Station-Robot Controller pair establishes its own Wi-Fi network. If there is a Wi-Fi suppressor
operating in the vicinity, then the suppressor disrupts the operation of any Driver Station-Robot Controller in
the area. If you suspect that there is a Wi-Fi suppressor operating at a venue, then you need to work with the
venue’s IT staff before the day of the event to disable the suppressor for any scheduled FIRST Tech Challenge
events.
Note that even though Wi-Fi suppressor technology is gaining popularity, according to the FCC,4F
5
federal law
“prohibits the operation, marketing, or sale of any type of jamming equipment, including devices that interfere
with cellular and Personal Communication Services (PCS), police radar, Global Positioning Systems (GPS),
and wireless networking services (Wi-Fi). There is an FCC Enforcement Advisory that warns that Wi-Fi
blocking is prohibited.”5F
6
Are the Wireless Radio Signals Being Blocked by Metal?
If you are at an event and you suspect that one or more robots are having wireless issues (higher ping times,
less responsive robots, etc.), then you should make sure that radio signals from the Driver Station and the
Robot Controller are not being blocked or screened by large sheets or pieces of metal.
For example, if the Robot Controller Android device is mounted deep within the frame of the robot and if there
are pieces of sheet metal or aluminum channel blocking or obscuring the Android device, then the radio signal
from the Robot Controller might get blocked and/or reflected. This can attenuate/reflect signals to and from the
Robot Controller. Also, if the Android device is mounted directly onto a metal plate on the robot, the signal can
also be blocked, reflected, or attenuated (remember, the antenna on many Android devices is located near the
back pane of the device).
5
See https://www.fcc.gov/encyclopedia/jammer-enforcement (accessed on 08/07/22).
6
See https://apps.fcc.gov/edocs_public/attachmatch/DA-15-113A1.pdf (accessed on 08/07/22).

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 31
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 33 - Metal music stands like this one can block, reflect or attenuate the signals to/from the Driver Station.
Similarly, if the Driver Station Android device is placed on something like a sheet metal plate, or if the Driver
Station device is enclosed in metal housing, then the signals to and from the Driver Station might be blocked,
reflected or attenuated.
As an example, FIRST conducted some experiments using a metallic music stand as a Driver Station stand for
a ZTE phone. FIRST used Wireshark to monitor the activity with and without the music stand in place. FIRST
observed that the wireless retry rate for the Android device sitting on the music stand was about twice as high
as the wireless retry rate for the same device when it was sitting on a wooden table. Even though the human
driver during the test did not perceive any difference in responsiveness of the robot when the music stand was
in place, the Wireshark data indicated that the quality of the wireless connection was worse whenever the
music stand was in place. FIRST attributes the increase in retry rate to the metal music stand
attenuating/reflecting the radio signals to/from the Driver Station.
Ideally, the Robot Controller and Driver Station devices should be mounted in a way that protects the devices,
but does not block the radio signals traveling to/from the devices. In most cases, the radios will work fine, even
if they are partially (or almost fully) obscured by metal. However, whenever the radios are obscured, the
signals are attenuated, therefore if the attenuation is high enough, the devices might start to experience
wireless connection problems.
Is There Malicious Activity Occurring?
Unfortunately, it is possible for a motivated individual to disrupt Wi-Fi networks using tools and techniques that
are described on the Internet. This vulnerability is true for most Wi-Fi networks, including the Wi-Fi networks
that are established by the FTC Driver Station-Robot Controller pairs.
There is an amendment to the 802.11 standard (802.11w) that makes it more difficult to conduct some of these
types of attacks. The 802.11w standard is the default setting for the REV Driver Hub and the REV Control Hub,
but unfortunately this wireless standard is not yet available on Android smartphones. For now, the Android
smartphone devices used at FIRST Tech Challenge events are vulnerable to certain wireless attacks.
There are tools that can help detect when certain wireless attacks have occurred. For example, Section 13 of
this document describes how to use Wireshark to look for clues that indicate that certain wireless issues are
present. However, these tools are not always available at many FIRST Tech Challenge events.
If you are at an event where you suspect that some malicious activity is occurring, you can try to use any
available tool to identify the party that is conducting the malicious activity. You can also rely on good, old-
fashioned “detective work” to look for suspicious activity in and around the Competition Fields. Also, if you
believe malicious activity is occurring, you can remind spectators and participants that this type of behavior is
ungracious and punishable by disqualification from the event and possibly the season.

32 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Determining if Wi-Fi Interference Warrants a Match Replay
The most critical responsibility of a FIRST Technical Advisor (FTA), Control System Advisor (CSA) or Wireless
Technical Advisor (WTA) is deciding if the wireless interference during a match is significant enough to warrant
a replay of the Match. This is a difficult and subjective decision to make. The game manual states that
“Matches are replayed at the discretion of the Head Referee only for a failure of a Game Element or verified
Wi-Fi interference that was likely to have impacted which Alliance won the Match.”
To make a recommendation to the head referee for a match replay, the FTA (or CSA or WTA) must have
sufficient proof of such Wi-Fi interference.
Scenario 1: High ping times for a robot
Consider the following scenario, a team during a match complains of an unresponsive or sluggish robot. The
team states that the ping times (as displayed on the FTC Driver Station app) were high (> 200 msec) for most
of the match. Does this situation warrant a Match replay?
In this instance, without additional information or evidence, an FTA would not have sufficient proof to
recommend a Match replay. High ping times for a robot can be caused by numerous factors.
● For example, if the Robot Controller app is running an improperly written OpMode (that blocks, for
example, in the main program thread and prevents other background tasks from periodically running),
the Robot Controller might become unresponsive, and the team will experience control issues.
● Or, as another example, if the Robot Controller is physically mounted in an area where its radio signals
are blocked by metal, the Driver Station might have a hard time “hearing” the Robot Controller and the
average ping time can increase noticeably.
For this scenario, the FTA needs additional proof before making the recommendation to replay a match:
● During the match, did the FTA have a Robot Controller – Driver Station pair that was used to monitor
the same channel as the team’s robot?
o If so, what were the observed ping times for the other Robot Controller – Driver Station set?
o Did the other set also experience sustained, high ping times during the match?
● Did the FTA have a device such as an Aircheck monitor or the MetaGeek Wi-Spy device (with the
inSSIDer software) monitoring the robot’s channel during the match?
o If so, did the device indicate that the wireless channel was extremely busy?
o Was there noticeable Wi-Fi and/or non-Wi-Fi interference on the channel?
● Did other teams who were operating on the same wireless channel during the match also experience
sustained high ping times and poor control of their robots?
● Did the FTA have a laptop running Wireshark in monitor mode to capture packets during the match on
the channel in question?
o If so, what were the observed retry rates for the robot that experienced the unresponsiveness?
o Also, what were the observed retry rates for the other robots on that channel?
o Was it only the one robot that had a high retry rate on the channel or did all the robots have high
retry rates?
Scenario 2: Robot Controller unexpectedly disconnects from the Driver Station
During a match, a team’s Robot Controller unexpectedly disconnects from the Driver Station and the team
loses the ability to communicate with and control their robot. Does this event warrant a Match replay?
Unfortunately, for this scenario, unless the FTA has solid proof of wireless interference causing the disconnect,
it is difficult for the FTA to recommend a Match replay.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 33
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
There are several reasons why a Driver Station can lose wireless connectivity to its Robot Controller. These
reasons include (but are not limited) to the following:
● Low battery on the Robot Controller or Driver Station Android device.
● Improperly configured Robot Controller or Driver Station Android device (for example, the Robot
Controller is also connected to another device and/or another network during the match).
● Disruption due to an electrostatic discharge (ESD) event or a physical impact to the Robot.
● High current draw from motors or servos causing a "brown-out" which temporarily affects the Robot
Controller's Wi-Fi antenna.
● Loose or disconnected wire supplying power to the REV Control Hub.
● Wire with damaged insulation contacts the robot structure.
To recommend a Match replay, the FTA would have to have reliable evidence that demonstrates that Wi-Fi
interference caused the observed disconnect:
● A Wireshark capture from the match that shows DEAUTH packets that look like they were sent from the
Robot Controller (i.e., that have the same MAC address/BSSID as the Robot Controller).
● Or, if an FTA/CSA/WTA observed a very large spike in activity on the Robot’s channel during the match
using a tool like the MetaGeek WiSpy or the netAlly Aircheck G3 Pro .
Additional Thoughts on Recommending a Match Replay
To recommend that a Match be replayed, the FTA must have reliable evidence that would support this
recommendation. For a high-profile event it is important that the FTA/CSA/WTA take steps before the event
and have some tools available during the event to help monitor the wireless environment.
If resources are limited, then using a spare set of Robot Controller and Driver Station devices to keep track of
the ping times is a relatively easy way to monitor the wireless environment. For larger and higher profile
events, the event host and the technical volunteers should consider using some of the more sophisticated tools
described in this document to monitor the wireless spectrum at their event. Unfortunately, these more
sophisticated tools can be expensive and require an investment in time to learn how to use them effectively.
Accommodating a Large Number of Robots at an Event
Wi-Fi Event Checklist
The wireless Control System is a point-to-point system. This means that each Driver Station-robot pair will
establish its own Wi-Fi network at an event (see Figure 2). If there are a large number of robots in a venue,
then there will be a large number of wireless networks operating in the venue. If there are a large number of
wireless networks operating in a small area, then there could be interference between the networks.
At smaller events with lower numbers (< 30 or 40) of robots, the likelihood of significant interference caused by
the Robot-Driver Station activity is small. If there is not any other source of interference (such as Bluetooth
devices operating on the Field or wireless audio/video systems broadcasting on the same frequency) the
FIRST Tech Challenge Control System should be able to operate properly.
At larger events (>30 or 40 robots) some steps might need to be taken before the event and during the event
to help keep things running smoothly. FIRST Tech Challenge has published a Wi-Fi Event Checklist that
contains detailed steps that a technical volunteer can take to help keep the wireless environment operating
smoothly.

34 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Distributing Robots Across Multiple Channels
Wi-Fi Channel Overlap
If there is an event that will have a large number of robots (> 40) in a small area, you should consider
distributing the Robots across multiple channels. Ideally, the lower the number of robots there are per channel,
the less traffic and interference there will be per channel. Note that 2.4 GHz Wi-Fi channels that are less than 5
channel widths apart overlap (see Figure 22).
Ideally, for 2.4 GHz Wi-Fi connections, you should distribute your robots on channels that are at least 5
channel widths apart. For example, if you were to configure one group of robots to channel 1 and a second
group to channel 5, the two groups of robots would overlap slightly since the second channel is only 4 channel
widths away from the first channel. If the second group of robots were moved from channel 5 to channel 6,
then the two groups would no longer overlap since they are 5 channel widths apart.
Sometimes it might not be possible to space your robots 5 channel widths or greater apart. For example, one
portion of the spectrum might be very noisy, and the robots are unable to operate on channels in or near that
portion of the spectrum. In this case, it still might be beneficial to place the robots in groups on separate,
overlapping channels. Even though the channels overlap slightly, placing the robots onto these channels might
produce lower ping times and more responsive robots when compared to keeping all the robots on the same
channel.
Factors to Consider when Selecting Wi-Fi Channels
If you would like to configure your robots to operate on more than one channel, here are some factors to
consider when doing your planning:
1. How many robots will be present? The data rates for the control streams of the robot are low. If the
wireless environment at your venue is clean, then a single channel should be able to support a pretty
large number of robots. In our testing, we could run 46 pairs of Android devices in a very tight area
(approximately 14’ x 14’) with good reliability and responsiveness.
If your event will have a modest number of robots (less than 40), and if your wireless environment is
clean, then you probably do not need to worry about moving robots around to different channels.
If you do have a large group of robots, then you should consider dividing them up, so you have a
maximum of 35 to 40 groups per channel if possible. For example, if you have 70 robots, you can divide
them into two groups of 35. You can also break up a large number of robots into even smaller groups
and then place them onto multiple, overlapping channels if needed.
2. Before you select your channels, are the target channels clear? Before you move your robots to a
specific channel, you should do some tests on the channel to verify that it is clear.
a. Use Wi-Fi Analyzer or a similar tool: You can use a tool like Wi-Fi Analyzer to see how many
access points are present on a channel. Remember, Wi-Fi Analyzer only shows you the visible
(non-hidden) wireless network. Also, Wi-Fi Analyzer does not show you how busy a channel is,
it only shows you what visible Wi-Fi networks are on a channel.
b. Use a pair of Android devices to monitor ping times: If a target channel looks relatively
clean, you should use a pair of Android devices running the FTC Driver Station and FTC Robot
Controller apps to monitor the ping times on the target channel. You will need a pair of Android
devices that support channel changing (such as approved FTC phones). You should switch to
the target channel and test to make sure you can select and run an OpMode (like the NullOp
sample OpMode). If the average ping times for the test Android devices are low (< 5 msec) then

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 35
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
the channel is clear. If the average ping times are high (>50 msec) then there might be some
type of interference on the channel.
c. If available, use a more sophisticated tool to monitor the target channels: If you have
access to a more sophisticated tool like the Aircheck meter, you can use it to sweep a target
channel. You want to use the tool to check for visible and hidden Wi-Fi networks. You also want
to check to see how much Wi-Fi and non-Wi-Fi traffic is present on the channel. If the activity
level is low on a target channel, then it should be safe to place your robots on the channel.
d. What type of Android devices will the Teams be using? FTC-approved smartphones
support channel changing using the FTC Robot Controller app. Here is the list as of August
2023 :
i.
Motorola Moto G4 Play (4th Generation)/Motorola Moto G4 Play
ii.
Motorola Moto G5
iii.
Motorola Moto G5 Plus
iv.
Motorola Moto E4 (USA versions only, includes SKUs XT1765, XT1765PP, XT1766, and
XT1767)
v.
Motorola Moto E5 (XT1920)
vi.
Motorola Moto E5 Play (XT1921)
For a list of allowed phones and other hardware and software, teams should refer to the FTC Game
Manual and its updates.
UnPairing Then Re-Pairing the Driver Station to the Robot Controller.
Note that after you have changed the channel on your Robot Controller Android device, you might have to
unpair your Driver Station from the Robot Controller, and then re-pair the Driver Station back to the Robot
Controller.
To unpair the Driver Station from the Robot Controller, launch the Settings menu from the Driver Station app
and select the Pair with Robot Controller item.
Figure 34 - Select Pair with Robot Controller.

36 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
From the Pair with Controller screen, select None to unpair your phone.
Figure 35 - Select “None” to unpair the device. Use the back arrow to return to the main screen.
Use the back arrow to return to the main Driver Station screen. The screen should now indicate that the Driver
Station is not paired with any Wi-Fi Direct device.
Figure 36 - The Driver Station should now be unpaired from the Robot Controller.
To re-pair the two devices, launch the Settings menu from the Driver Station app again and select Pair with
Robot Controller again (see Figure 33). Find the listing for your Robot Controller Android device (in this
example “ZTE-026”) and select this item.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 37
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 37 - Select your target device (in this example ZTE-026), then use the back arrow to return to the main screen.
Note: Your Robot Controller smartphone Android device might prompt you to make sure you approve the
connection request. On the Robot Controller device, click on the Accept button to approve the connection
request.
Figure 38 - Click Accept to approve of the connection request.
Once you have accepted the connection request, the Driver Station screen should display that it has
successfully connected to the Robot Controller.

38 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 39 - Once the connection request is accepted, the Driver Station should connect to the Robot Controller.
Changing the Channel Using an Approved Motorola Smartphone
If you are using an approved Motorola smartphone as your Robot Controller, you can use the channel change
function that is built into the FTC Robot Controller app to change the Wi-Fi Direct operating channel. From the
Robot Controller app, launch the Settings menu and select the Change Wi-Fi Channel option.
Figure 40 - Launch the Settings menu, then select Change Wi-Fi Channel (highlighted above in red).

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 39
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
In the Change Wi-Fi activity, select the target channel from the drop-down list of available channels.
Figure 41 - Select your desired operating channel from the drop-down list (highlighted above in red).
Once you have selected the desired target channel, push the Change Channel button to change the operating
channel. If the operation is successful, you should see a toast appear, indicating that the channel was
successfully changed.
Figure 42 - A toast should appear indicating that the channel change was successful.
Once the channel change has completed, use the Android back arrow button to return to the main screen. The
Driver Station should be able to reconnect to the Robot Controller using the new operating channel.
Mitigating Disruptions Due to Electrostatic Shocks
Electrostatic discharge (ESD) events have the potential to disrupt the normal operation of a competition robot.
This section examines causes of ESD events and discusses ways to mitigate the risk that an ESD event will
disable or damage a robot’s control system. Special thanks to Doug Chin, Eric Chin, and Greg Szczeszynski
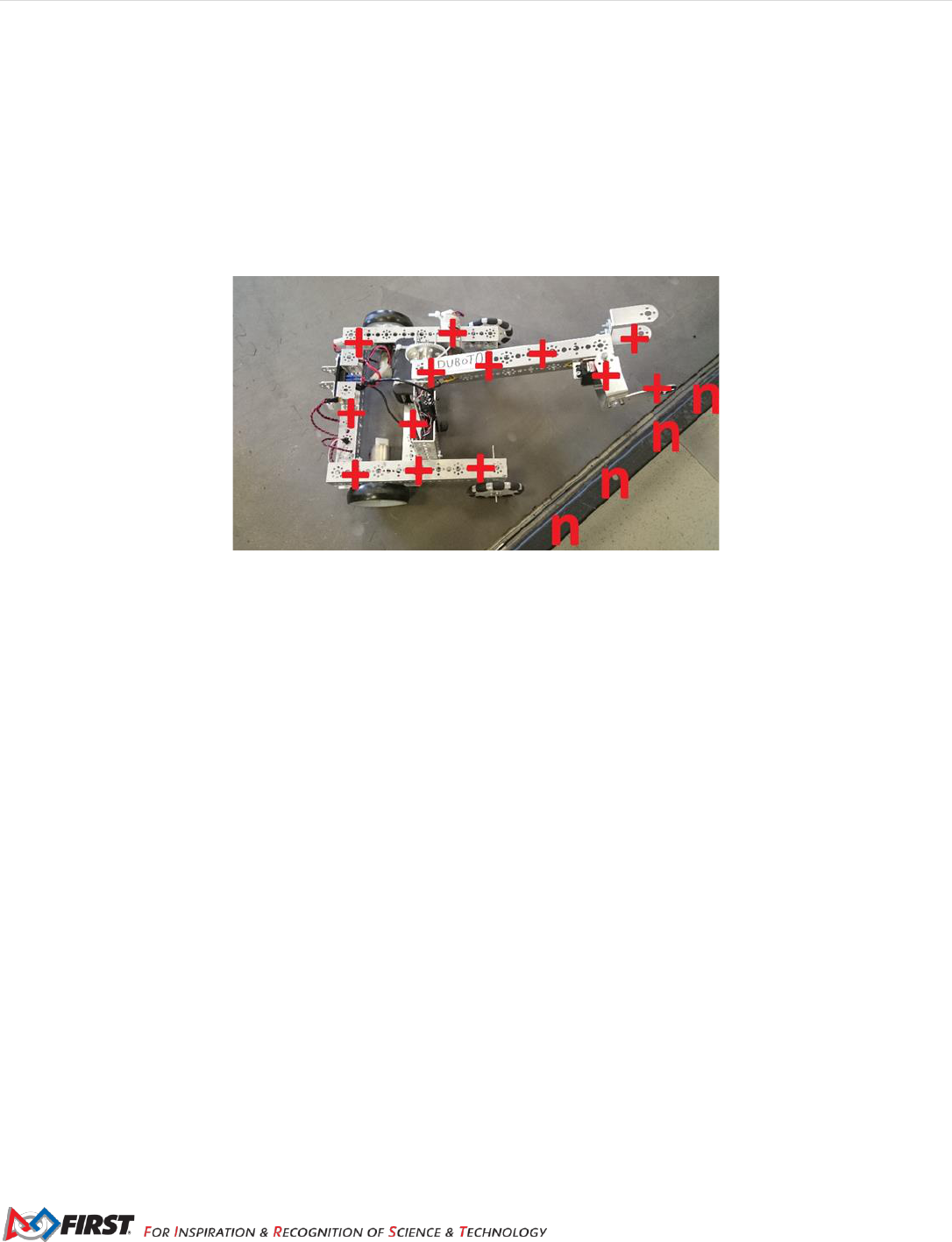
40 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
for the work they did to model the problems caused by ESD and to evaluate different techniques to mitigate the
risk caused by this phenomenon.
What is an Electrostatic Discharge Event?
An electrostatic discharge (ESD) event occurs when a highly charged conductive object (like the metal frame
of a robot) touches an uncharged or oppositely charged conductive object and discharges to it. Because of the
high voltages involved (up to tens of kilovolts), ESD events can produce extremely high electrical currents as
the charge that was accumulated on one object flows through a conductive path to the neutral or oppositely
charged object.
Figure 43 – A positively charged robot next to a neutral perimeter wall.
How Does an ESD Event Disrupt a Robot?
Although ESD current spikes are extremely brief, they can easily damage or disrupt sensitive electrical
devices. Communication wires between control system components are particularly vulnerable to disruption. If
the current during the ESD event is large enough, it can destroy chips whose inputs are not well protected.
How Robots Become Charged
Consider what happens when you shuffle your feet on a carpet in wool socks and then touch a doorknob. You
will almost certainly get a shock. What causes this phenomenon? When two surfaces interact, there is a small
amount of adhesion. This means that they share electrons and if they are made from different materials the
electron sharing may be uneven. When the surfaces are taken apart, they can become charged. This is called
the triboelectric effect.
Thinking about the earlier example, you might wonder why sliding your feet builds up more charge than
walking around. This is because tiny bumps on your sock and on the carpet create vibrations that cause them
to make and break contact very quickly, which moves more electrons.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 41
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 44 – Due to the triboelectric effect, charge is transferred from one object moving relative to another.
A robot's wheels moving on field tiles build charge on the robot frame just like your wool socks moving on
carpet build charge on your body. Many other plastic and rubber materials behave similarly. It is important to
note that triboelectric charging takes charge from one object and transfers it to another, so the charges are
mirrored. In the case of an FTC robot, positive charge flows from the floor and accumulates on the wheels
resulting in a positive charge on the wheels and a negative charge on the tiles.
Note that historically, the transfer of charge (i.e., the flow of electrical current) is represented by the flow of
positively charged particles. However, it is actually the flow of electrons (negatively charged particles) that
occurs when there is an electrical current. In Figure 44 (see above) it is the transfer of negatively charged
electrons from the wheel to the tile floor that results in a net positive charge on the wheel and a net negative
charge on the floor.
Also note that a robot with wheels that slide across the soft tiles of a competition field will build electrostatic
charge on its frame more rapidly than a robot with wheels that roll across the tiles.
Discharging a Robot
Current “wants” to flow from objects at higher potential to the objects at lower potential to equalize the voltage
difference between them and it will if given a conductive path to do so (like an uninsulated wire). In the case of
a robotics competition, if a robot is at a higher potential than another metallic object (such as a portion of the
game field), an ESD event will occur if the frame of the charged robot contacts the other object.
If the potential difference is high enough, it is also possible for current to flow through the air in two different
ways. The first is arcing, which is when the air between two differently charged conductors becomes ionized
and allows current to flow from one conductor to the other. Arcs at voltages seen on FIRST Tech Challenge
robots can jump air gaps of more than 3/8” (1 cm). Arcs behave almost like direct contact, so they can carry a
significant amount of current. Visible sparks accompany some electrostatic arcs.
Figure 45 - Electric arc between two spheres of opposite charge.
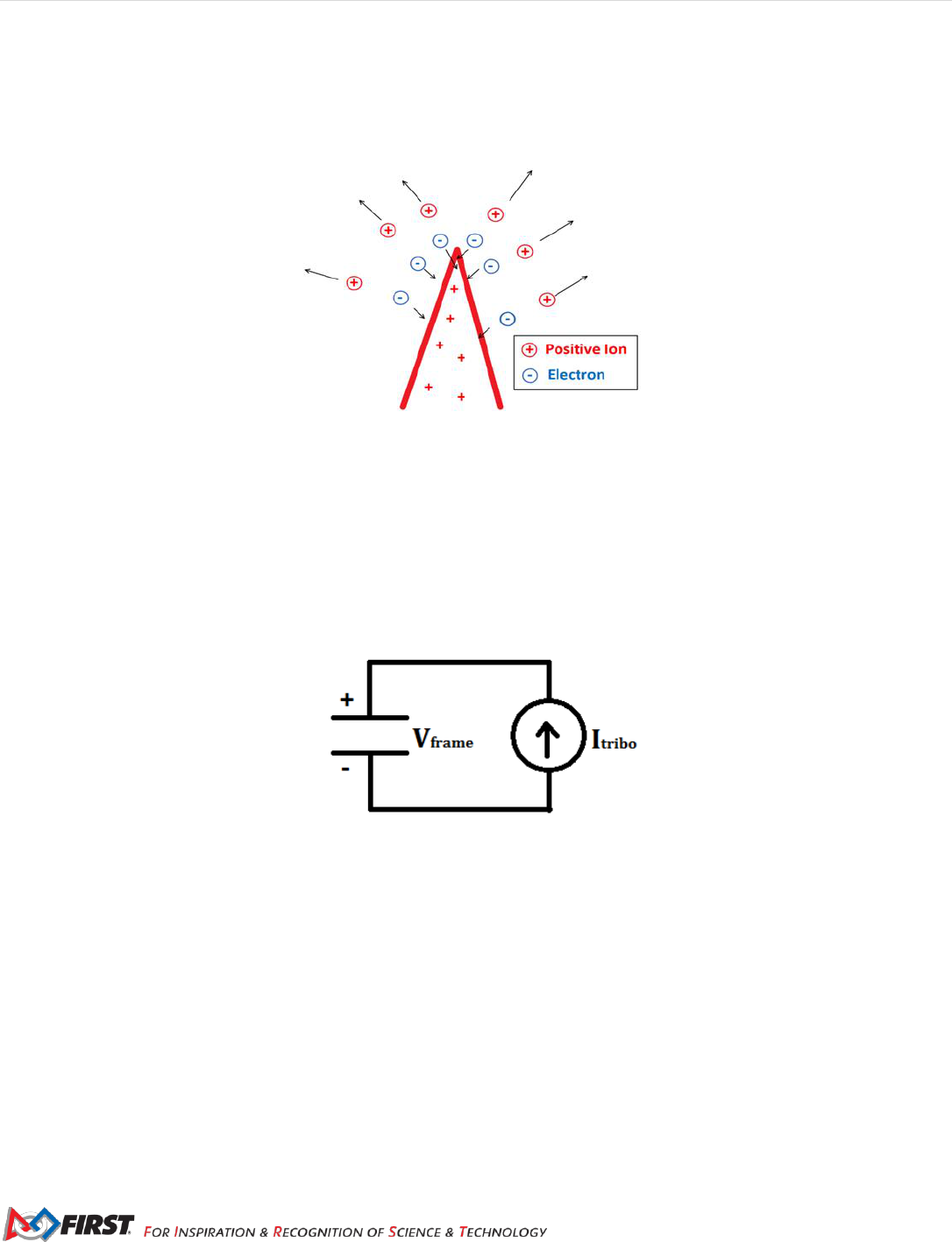
42 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
The other method of discharging through the air is corona discharge, which is when air molecules become
ionized around a conductor and allow charge to dissipate into the surroundings. Corona discharge requires a
large electric field to have any meaningful effect. Highly curved objects, like sharp edges, points, and thin wires
can concentrate electric fields and thus, they tend to produce more corona discharge than smooth objects.
Figure 46 - Corona discharge from a positively charged conductor.
Corona discharge carries very little current, so it normally does not pose any risk to electronics. This makes it
useful for slowly discharging a robot without causing ESD problems.
Modeling the System
When thinking about how to safely deal with ESD, it is useful to think of a robot as a capacitor. You can store
charge on its frame and a voltage difference can be measured on the frame relative to ground. The triboelectric
effect can be roughly modeled as a current source that charges the frame of the robot.
Figure 47 - It is helpful to model the robot as a capacitor and the triboelectric effect as a current source that charges the capacitor.
If the highly charged frame of a robot comes close to a conductive object of neutral or opposite charge, then
the accumulated charge on the frame will discharge rapidly to the other object. If there are sensitive electronics
along the path of this discharge, the operation of the robot could be disrupted, and the electronics could be
damaged.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 43
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 48 - If the frame gets close enough to a neutral or negatively charged object, current will flow, analogous to shorting a capacitor.
Similarly, the electrical system of a robot can also be modeled as a capacitor with capacitance to both ground
and to the metallic frame of the robot. If the electrical system is at a different electrical potential than either the
frame of the robot, or another conductive object (like a field element or the frame of a different robot), an
electrostatic discharge event can occur if an exposed or poorly insulated portion of the electronics comes close
to the frame or the other object.
Figure 49 - The electronics on a robot can be modeled as a capacitor and a discharge can occur if a potential difference exists.
In Figure 49 (see above) if the voltage of the frame exceeds the voltage of the electronics (V
frame
> V
electronics
),
then an electrostatic discharge event can occur if a portion of exposed or poorly insulated electronics is moved
near the frame of the robot.
Figure 50 - The base of the JST cable is poorly insulated and an electrostatic discharge can occur in this area.
For example, the base of the JST sensor cable (see Figure 50 above) is poorly insulated. Laboratory tests by
FIRST demonstrate that if a voltage difference exists between the frame of a robot and the electronics of a
robot, an ESD event can occur if the base of the sensor is placed in proximity (within 3/8”) to the charged

44 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
frame of the robot. The tests also show that sensitive electronics (such as the I2C controller) can be disrupted
or damaged by such an ESD event.
It is important to note that, just like shorting a highly charged capacitor, shorting the electrical system or robot
frame to ground while charged will produce extremely high currents unless there is a resistor placed in series
along the path of the discharge. This is the root cause of all ESD issues on the field. If the induced current is
large enough, it can disrupt the operation of and in some cases damage the sensitive electronics that are in the
path of the induced current.
Figure 51 - Spark produced by short circuiting a capacitor from camera.6F
7
Short circuiting a charge capacitor can be dangerous.
Measuring Relative Humidity
As an FTA or CSA, it is helpful to know what the relative humidity is at a competition venue. As relative
humidity increases (i.e., as the air gets more moist) the likelihood of a significant ESD event occurring
decreases. When the air is very humid, the additional moisture helps prevent the build-up of large electrostatic
charge on objects. Excess charge will discharge more readily (at a lower voltage) in a damp environment and
the risk of a severe ESD event is diminished.
Relative humidity is the ratio of the amount of moisture in the air (dewpoint) divided by the maximum amount of
moisture that could be stored in the air (saturation) at the current temperature. The following chart shows the
percent water vapor in the air as a function of temperature for different relative humidity values. The higher the
percentage of water vapor that is in the air, the lower the risk is for ESD events affecting a competition. Note
that other factors, including robot design, will determine how significant ESD effects will be during a
competition.
7
From https://commons.wikimedia.org/wiki/File:Electrical_spark_from_a_shorted_camera_capacitor_P.2005.04.27.jpg
(downloaded on 6/25/18).

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 45
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 51-Relative humidity chart.7F
8
At lower relative humidity (30% and lower at comfortable room temperatures), the likelihood for a severe ESD
event on a competition field is more significant. At higher relative humidity levels (35% and higher at
comfortable room temperatures) the likelihood is less significant, but ESD events can still occur. For our
laboratory testing, FIRST uses digital hygrometers that are available from hardware stores (including Home
Depot) or online from Amazon.com. Specifically, we use a digital Indoor Thermometer/Hygrometer from
AcurRite.
Figure 52 - Digital Hygrometer/Thermometer.8F
9
8
From https://www.quora.com/How-do-I-maintain-temperature-humidity-in-an-HVAC-system (downloaded 6/26/18).
9
Image from https://www.acurite.com/humidity-temperature-monitor-00613.html (downloaded 6/26/18).

46 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Although the commercially available hygrometers are fairly accurate, for our laboratory testing, FIRST used the
following procedure to calibrate our digital hygrometer:
1. Make a saturated table salt solution by partly filling a bottle cap with water, then adding salt until it no
longer dissolves.
2. Place the hygrometer and salt solution (in the bottle cap) into two layers of sealable plastic bags and
leave it sitting for several hours at room temperature. Leaving it overnight is sufficient.
3. The hygrometer should read 75%. If it does not, find the offset and apply it across the range of the
hygrometer. For example, if your hygrometer reads 71% after performing the procedure, then your
offset is +4%.
Measuring Electrostatic Voltage
FIRST uses a couple of different devices to measure the electrostatic charge during ESD testing. Note: that as
an FTA or CSA, it is not critical to have the ability to measure electrostatic charge. During a typical competition,
if basic steps (such as treating the tile floors with anti-static spray, equipping cables with ferrite chokes, and
installing the REV Resistive Grounding Strap) are taken to mitigate the effects of ESD, then measuring the
relative electrostatic voltage on the robot or a field element is unnecessary.
The first device is the AlphaLab Surface DC Voltmeter SVM2.
Figure 53 - AlphaLab SVM2 Surface DC Voltmeter.9F
10
The SVM2 is a handheld device that provides a measurement of electrostatic charge on the surface of an
object. The SVM2 makes the measurement without touching the surface (which would disturb the charge). It
works by measuring the field strength generated by the charged object. If held at a specified distance above
the surface, the SVM2 displays the value of the measured field strength as a voltage (-29.999kV to
+29.999kV). The SVM2 must be connected to a reference ground and displayed voltages are measured with
respect to the reference ground.
The SVM2 can measure the relative electrostatic charge for a conductive surface (like the metal frame of a
robot). It can also measure the charge for a non-conductive surface (like the tile floor of a competition field).
The second device is the Munroe Electronics Stat Arc II, model 265A-1 analog meter. This device is similar to
the AlphaLab SVM2, but it also has the benefit of having an analog output signal which makes it easier to use
for automated data collection.
10
Image from https://www.alphalabinc.com/product/svm2/ (downloaded 6/26/18).

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 47
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 54 - Munroe Electronics Stat Arc II, model 265A-1 analog meter.
Treating the Tiles to Mitigate Electrostatic Build-Up
One of the most effective ways to reduce the risk of disruption by ESD events is to treat the tile floors of a
competition field with antistatic spray to increase its electrical conductivity. Increasing the electrical conductivity
of the tile floor prevents large build-ups of electrostatic charge on a robot. For example, if a charge imbalance
exists between the wheels of a robot and the tile floor, the charge will flow due to the enhanced conductivity
and the imbalance will be neutralized.
If you model the system as a capacitor and a current source (see Figure 47) then treating the surface of the tile
floor has the effect of decreasing the strength of the current source so that very little charge accumulates
across the capacitor. You can also model the enhanced conductivity of the treated tile floor as a conductive
path with a resistor in series to ground. As charge accumulates on the capacitor, it is bled off to electrical
ground through the resistor (which represents the treated tile floor).
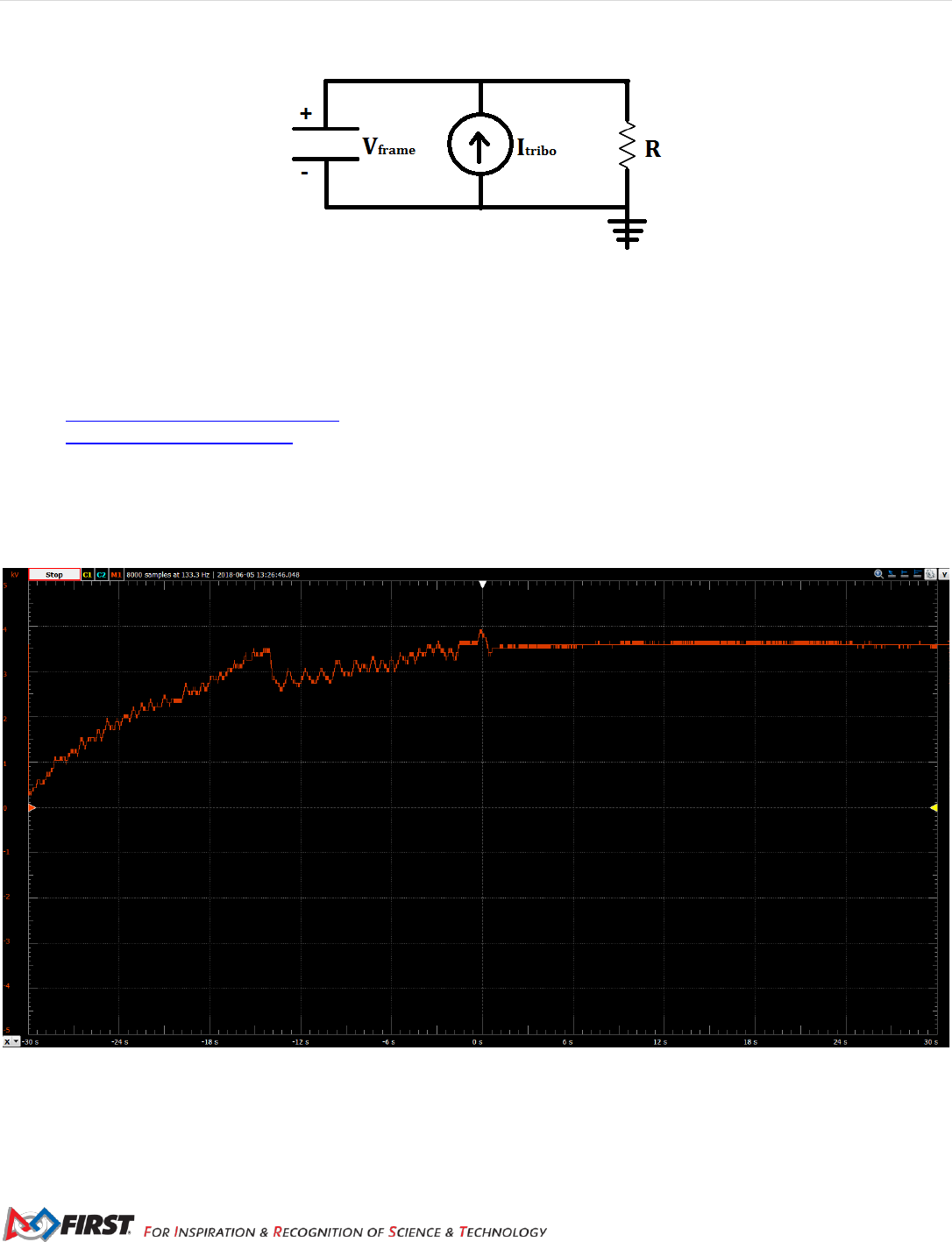
48 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 55 - The enhanced conductivity of the treated tiles can also be modeled as a resistor that bleeds excess charge to ground.
FIRST conducted a series of tests to quantify the effectiveness of anti-static treatments for the tile floor. It
tested the following treatments to determine their relative efficacy:
1. Tap water.
2. ACL General Purpose Staticide.
3. ACL Heavy Duty Staticide.
During the test, a robot was driven back and forth across a tile floor to generate a build-up of electrostatic
charge. Halfway through the test period, the robot is stopped, and the electrostatic charge is allowed to
dissipate. The following images are oscilloscope traces of the measured charge for the test robot running over
four different types of tile.
Figure 56 - Voltage vs Time for untreated tile.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 49
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 57 - Voltage vs Time for tile sprayed with water.
Figure 58 - Voltage vs Time for tile treated with Regular Staticide.

50 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 59 - Voltage vs Time for tile treated with Heavy Duty Staticide.
In all the scope traces, the scale of the vertical axes is the same (1 kV per major division). Similarly, the scale
of the horizontal axes is the same for all the traces (6 sec per major division). It is important to note that for the
tests of the untreated tile, the tile treated with water, and the tile treated with Regular Staticide, the initial
voltage of the robot is roughly the same (approximately -0.5 to -0.75 kV). In the untreated tile trace (Figure 56)
the starting point of the test is not visible in the trace, but its starting voltage was about the same as the initial
values for the Regular Staticide and water tests. Also note that the Heavy Duty Staticide test was conducted on
a different day and the robot had a different initial voltage as measured by the 265A-1 meter.
The scope traces reveal that treating the tile with water or with the Heavy Duty Staticide are extremely effective
at preventing charge build up on the test robot. The voltage curves are effectively flat for both the water test
and the Heavy Duty Staticide test.
For the untreated tile, the voltage peaks at around 4kV, and it persists at a high level (3.5kV) throughout the
remainder of the test. For the tile treated with Regular Staticide, while the robot is driving, the measured
voltage peaks at around 2kV. However, for the tile treated with Regular Staticide, when the robot stops moving,
the measured charge decays to 0kV.
While using tap water is extremely effective, the application of water to the tile floor can change the coefficient
of friction for the tile and make it more slippery for the robots. Also, over time, the water will evaporate, and it
needs to be reapplied periodically (FIRST officially recommends every 20 or so minutes) in order to stay
effective.
The commercial Staticide sprays work well, but some event organizers report that they could potentially
increase the tackiness of the soft tiles. In our testing we did not notice any significant change in tackiness for
our treated tiles, but we did not objectively measure the tackiness. We only subjectively measured the
tackiness by comparing the feel of the treated tile to the feel of an untreated tile.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 51
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
FIRST also conducted some tests to look at the longevity of the commercially applied static sprays. The charge
accumulation for a robot driving over a tile that was treated with the regular strength Staticide spray was
measured. The robot was then allowed to drive for an hour over the treated tile. Then the charge accumulation
was measured again after the hour-long test. A slight increase in the measured max voltage was observed
after the hour-long test, but the increase was not significant.
Figure 60 - Charge accumulation with initial coat of Regular Staticide (note max voltage ~ 0.75kV).
Based on the longevity testing, a single application of Regular Staticide spray at the start of a competition day
will most likely be sufficient to last throughout the entire event. The manufacturer suggests the Regular
Staticide will “last for weeks to months depending on the application.”
FIRST also conducted longevity tests with the Heavy Duty Staticide Spray. The charge accumulation was
observed when the coat of antistatic spray was fresh. Then the charge accumulation was observed again after
driving the test robot for an hour on the treated tile. The results were impressive – the charge accumulation
trace was flat for both the initial and final voltage traces.
We believe that a single application of the Heavy Duty Staticide spray will be even more effective than the
Regular Staticide spray, and according to the manufacturer, an application of Heavy Duty Staticide will “last for
weeks to months depending on the application.” We suspect that Heavy Duty Staticide can be applied
infrequently to the tile floor (i.e., not every competition) and still be effective.

52 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
The test results are summarized in the following table:
Test
Voltage
Notes
Changes to Surface
Quality
Nothing
3.5 kV
-
-
General Purpose
Staticide
2 kV
Slightly less effective after
durability test
Minimal
Heavy Duty Staticide
0 kV
No difference after durability
test
Minimal
Water
0 kV
Dries quickly and needs to be
re-applied
Slippery
Figure 61 - Summary of antistatic spray test results.
Based on the test results, the FIRST Tech Challenge engineering team recommends that the ACL Heavy Duty
Staticide antistatic spray be used to treat the tile floor to mitigate the risk of ESD disruptions. The Heavy Duty
Staticide should be applied per the manufacturer’s instructions to the surface of the tile. Once applied, the
spray does not need to be reapplied too often. The Heavy-Duty spray does not need to be reapplied over the
course of a daylong or weekend-long event. The Heavy-Duty spray could be applied once every few events. If
the tiles are washed or if there is a critical event (such as a regional or world championship) then the Heavy-
Duty spray should be reapplied.
Event organizers could also choose to use the General Purpose Staticide antistatic spray. While not as
effective as the Heavy-Duty spray, the General-Purpose spray will also help reduce the risk of ESD disruption.
However, the engineering team recommends the Heavy-Duty spray over the General-Purpose spray if an
event organizer is considering which spray to purchase. The Heavy-Duty spray is noticeably more effective
and is recommended by the manufacturer for a porous surface like the tile floor.
If an event organizer does not have any Staticide spray or prefers not to use the commercial antistatic spray,
then a spray bottle filled with tap water can be a very effective method to reduce the risk of ESD-induced
disruptions. However, if water is used, care should be taken to make sure the surfaces of the field and field
elements are not too slippery, and that the water is reapplied periodically to maintain its effectiveness:
1. Water should be sprayed onto the soft tile floor, so the tile just visibly absorbs the moisture.
2. Avoid over-spraying the tiles since this will make the surfaces too slippery and will not enhance the
effectiveness of the spray.
3. Use a towel or rag to dry off any field elements that might have been inadvertently sprayed during the
process. You should try to confine the moisture to the tile floor, where most of the electrostatic charge
is normally generated.
4. Water should be reapplied periodically, perhaps every 20 to 25 minutes, or if the tiles become visibly
dry (and feel dry to the touch).

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 53
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Using Ferrite Chokes to Reduce Disruption Caused by an ESD Event
Treating the tile floor with antistatic spray is the one of the most useful strategies to minimize disruption from
ESD since it helps prevent the buildup of electrostatic charge on the robots. Using ferrite chokes on signal
wires of a robot’s control system is another effective way to mitigate the risk of disruption due to an ESD event.
Using ferrite chokes will not prevent the buildup of electrostatic charge on a robot. However, using ferrite
chokes can help reduce the severity of the impact on a robot if an electrostatic discharge event occurs.
Figure 62 - Snap-on ferrite choke.
Ferrite chokes block large changes in current like those seen during an ESD event. This can reduce the risk of
damage to or disruption of electrical components when a sensor or other device receives a shock.
Better quality USB cables often include built-in ferrite chokes to filter noise from the cable. Snap-on ferrite
chokes can be purchased from a variety of vendors and can be installed on sensor cables, encoder cables,
and even servo cables. Anecdotal reports from the FIRST community and laboratory testing by FIRST have
confirmed the efficacy of using ferrite chokes to reduce the risk of ESD disruption.
Table 3 lists the results from a set of tests conducted with a REV Robotics Expansion Hub. In this set of tests,
the frame of a robot was electrostatically charged to a voltage of 7.5 kV. A REV Robotics color sensor was
then placed close to the frame of the robot to induce an electrostatic discharge event. The tests were
conducted with and without a ferrite choke installed on the sensor’s I2C cable. The tester noted whether the
operation of the Expansion Hub was disrupted by the induced ESD event. The results show that the system
experienced twice as many failures (6 vs. 3) when a choke was not installed on the signal wire.

54 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Description
Unaffected
Disrupted
Choke installed on I2C sensor cable, 7.5 kV
7
3
No choke 7.5 kV
4
6
Figure 63 - ESD Disruptions with and without a ferrite choke installed.
Ferrite chokes are one of the easiest-to-implement and most effective ways to mitigate disruption from
electrostatic discharges. These devices help filter out high frequency signals that can be generated by an
ESD event.
Snap-on ferrite chokes can be installed on cables that do not already have them to reduce the risk of
disruption:
● Sensor wires (analog, digital and I2C)
● Encoder cables
● Servo cables
● USB cables
Note that ferrite chokes are relatively heavy. Teams should accommodate the additional bulk and weight that
accompany these chokes when securing and strain relieving cables on the robot.
Isolating Electronics to Prevent Arcing with Frame
Isolating the electrical system from the metal frame of a robot can prevent arcing through sensitive
components. Electrically isolating or insulating the electronics from the frame reduces the risk of an
electrostatic discharge between the electronics and the charged frame of a robot.
Figure 64 - Charge that accumulates on the frame is less likely to arc if the control system is electrically isolated.
Isolating the electronics is particularly important in areas where exposed or poorly insulated metal from the
electrical system comes close to the metallic frame of the robot.
As an example, laboratory tests demonstrate that arcing can occur when the frame of the robot is charged and
a REV Robotics I2C cable connector is placed near the metallic frame. In these tests, an I2C connector (see
Figure 50 ) attached to a Color Sensor was brought close to the frame, which produced an arc that disrupted
the Expansion Hub I2C port, and in some cases damaged it. Electrically isolating the Color Sensor from the
charged frame prevented this problem.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 55
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 65 - Exposed metal on connectors used for a servo cable.
The FIRST Tech Challenge engineering team recommends that teams isolate their control system electronics
from the metal frame of their robot. Electrical isolation includes making sure that there is a large air gap
(greater than 3/8" or 1 cm) between any exposed metal in the electrical system and any conductive frame
member.
Figure 66 - Keeping exposed or thinly insulated portions of the electronics more than 3/8" (10 mm) away from the frame can help.
The strategic placement of electrical tape between the frame and exposed or poorly insulated metal from the
electrical system will also help prevent arcs or mitigate their effects.
Figure 67- Electrical tape (colored yellow in the images above) can also be used to insulate exposed or poorly insulated metal.
Also, mounting the electronic modules on a non-conductive material (such as a thin piece of plywood or a thin
sheet of PVC type A) can help. Although the electronic modules have plastic housings, mounting the module
on a non-conductive plate moves the electronics even further away from the metal frame and further reduces
the risk of arcing.

56 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 68 - Mounting modules on insulated material can help isolate the electronics.
Cladding Exterior Metal Features of the Robot with Electrically Insulated Material
Another strategy that has been effective for teams is to cover exposed portions of their metallic frame with an
electrically insulated material. Covering the exterior parts of a robot with a non-conductive material reduces the
risk that metal parts of the robot will touch a metallic object that is at a different electrical potential and cause a
severe ESD event. Wooden bumpers, electrical tape and other non-conductive coatings can help.
Figure 69 - Insulating portions of the robot that touch other metallic objects on the field can help.
In past seasons, teams have strategically insulated the parts of their robot that are most likely to touch a
metallic field element, perimeter, or another robot. These teams have had good results in reducing the
frequency and severity of ESD events for their robot.
Ground the Electrical System to the Robot Frame through a Resistor
Because it is difficult to perfectly isolate the electrical system, it is beneficial to ground the electrical system to
the frame of the robot to prevent a potential difference from building up between the frame and the electronics.
Figure 70 - By grounding the electronics to the frame through a resistor, charge equilibrates across the two systems.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 57
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
It might initially seem contradictory to both insulate the electronic components of the control system from the
frame and to also ground the electronics to the frame. However, if the electronics are not grounded to the
frame, shocks can occur if a charge builds on the robot frame and an exposed or poorly insulated portion of the
electronics (such as the base of a REV Robotics color sensor) gets close to it. If the electronics are grounded
to the frame, the grounding wire helps keep the electronics at the same potential as the frame, preventing arcs
between the two systems.
Note: that grounding the electronics to the frame through a resistor will prevent shocks when the frame
accumulates charge and an uninsulated section of the electronics gets close to it, but a shock can still occur if
the frame accumulates a charge and then contacts a metallic object at a lower potential because the
electronics cannot instantly discharge through the resistor. If the grounding resistor is sized properly, it can still
help to reduce the seriousness of the electrostatic shock for this scenario. Also, it is usually better for induced
charge in this scenario to flow through the grounding cable, rather than through an exposed portion of the
electronics (like a Color Sensor or servo cable).
Figure 71 - The REV Robotics Resistive Grounding Strap (part # REV-31-1269) is the only approved grounding cable.
The FIRST Tech Challenge engineering team recommends that teams ground their control system electronics
to the frame of the robot through a resistor. Teams may only use a FIRST-approved, commercially
manufactured cable. A FIRST-approved cable has an appropriately sized inline resistor. This resistor is
critical because it acts as a safeguard to prevent excessive current from flowing through the frame of the robot
if a “hot” (positive) wire of the electronics system is inadvertently short circuited to the frame of the robot. Also,
the commercially manufactured grounding cable has a keyed connection, which is designed to prevent a user
from inadvertently connecting a hot (12V) line to the frame of the robot .
Figure 72 - Teams may only use a FIRST-approved cable to ground the electronics to the frame.
Also note that FIRST conducted a set of tests using REV Robotics Expansion Hubs to test the effectiveness of
grounding the control electronics to the frame through a resistor. During these tests, a Van de Graaff generator
was used to charge the frame of a test robot to a high value (on the order of 10 to 15kV). A servo mechanism
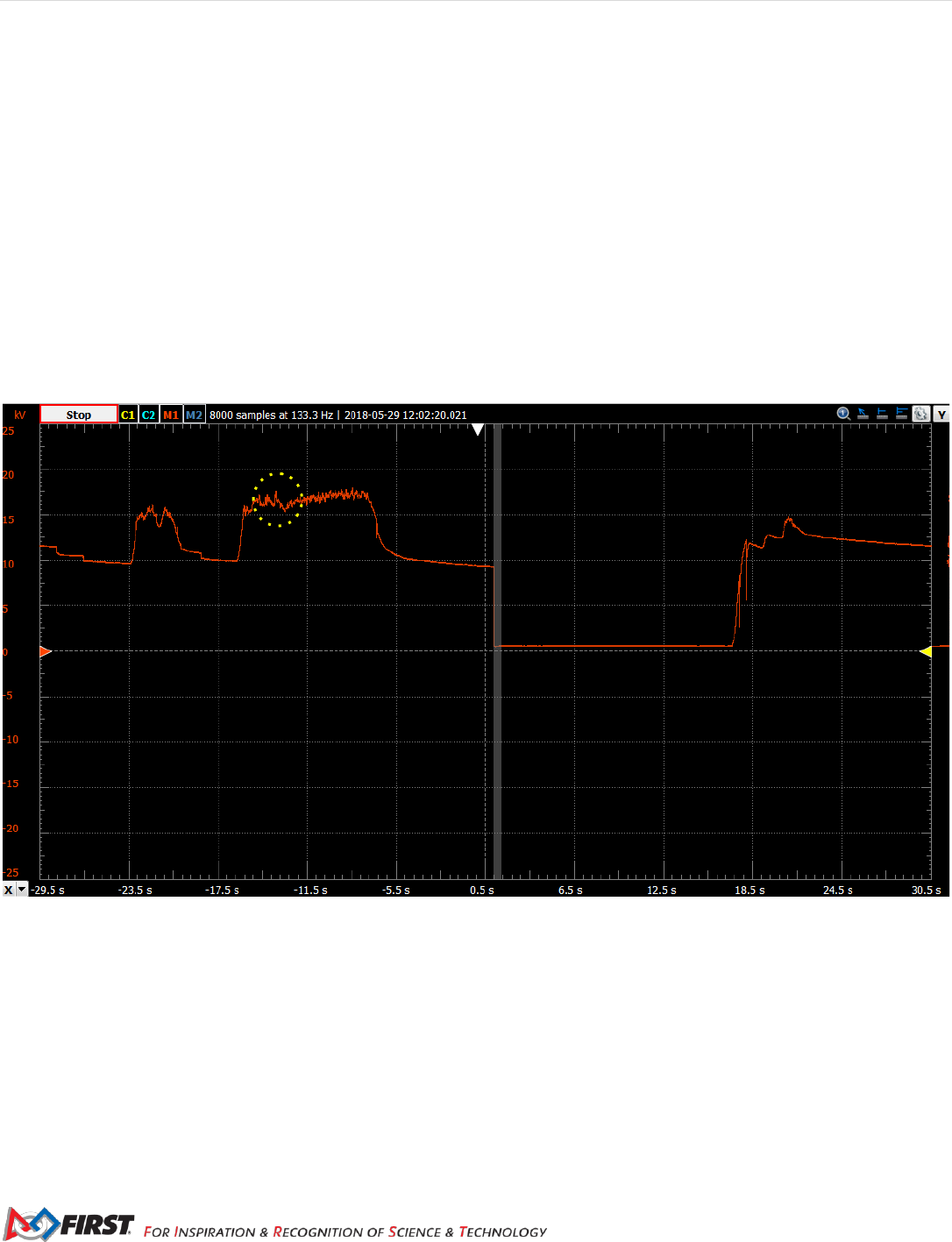
58 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
was used to move a REV Robotics Color Sensor that was plugged into an Expansion Hub close to the charged
frame of the robot. An electrostatic field meter was used to monitor the voltage on the robot.
During the initial set of tests, a grounding cable with a resistor inline was used to connect the negative terminal
of the electrical system to the metallic frame of the test robot. When the test was conducted with a 120 Ohm
resistor in place, the operation of the I2C sensor was only temporarily disrupted in 1 out of the 10 test runs. For
90% of the test runs, placing the Color Sensor close to the frame of the robot did not produce an ESD event
that resulted in a disruption of the operation of the sensor.
For the next stage of testing, the grounding cable was removed. In this scenario the control system electronics
were isolated from the metallic frame of the robot (see Figure 66). The frame of the robot was charged up with
a Van de Graaff Generator and then the servo was used to move the Color Sensor close to the frame causing
an electrostatic discharge between the highly charged frame and the poorly insulated portion of the JST
connector. When this occurred, the Expansion Hub lost contact with the Color Sensor. Upon closer inspection
we determined that the I2C port was damaged by the induced current, but the Color Sensor was not.
Figure 73 - A servo moved color sensor near frame near the -13 sec mark, causing an ESD event and damaging the I2C port.
Figure 73 above is the voltage trace from the electrostatic field meter which shows the measured voltage for
the test run where the I2C port was damaged. For this run, there was no grounding cable installed and the
ESD event occurred around -13 seconds on the trace (highlighted by the yellow circle). This ESD event caused
permanent damage to the I2C port.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 59
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Troubleshooting Common Issues
FIRST Tech Challenge Driver Station
Gamepad is Not Recognized
If a gamepad is recognized by the FIRST Tech Challenge Driver Station app, then whenever there is activity
with that gamepad, the appropriate gamepad icon in the upper right-hand corner of the FIRST Tech Challenge
Driver Station main screen will be highlighted in green.
Figure 74 - The gamepad icon will be highlighted in green if gamepad is recognized and active.
If you encounter a team who is having problems with input from the gamepad, check the following items:
1. If a team is using Logitech F310 gamepads, then make sure the button on the bottom side of the
gamepad is set to the “X” position (Xbox emulation mode).
2. Make sure the gamepad has been designated as either driver (user) #1 or driver (user) #2. To
designate a gamepad as driver #1, press the START button and A (green colored) button on the F310
gamepad. To designate a gamepad as driver #2, press the START button and the B (red colored)
button on the gamepad. Important note: the version 5.5 and greater Driver Station software
automatically recognizes what type of FTC-approved gamepad a team is using. Teams no longer need
to configure the gamepad type manually.
3. Check the wired connection. If the gamepad was temporarily disconnected from the Driver Station, then
the driver will have to re-designate which driver they would like to be by pushing START and A (to be
driver #1) or START and B (to be driver #2). Note that in some instances, the Driver Station can
automatically recover a lost joystick, but if both gamepads are of the same type, and if both gamepads
get disconnected at the same time, the user will have to re-designate the driver position for each
gamepad.
4. Disable Advanced Gamepad Settings. If the application is crashing when the gamepad is plugged in, or
the gamepad is not being detected properly, disabling the Advanced Gamepad Settings is one step to
triage issues. Advanced Gamepad disabling has only been proven effective with troubleshooting first-
generation DualShock 4 controllers. Advanced Gamepad settings are not required to use the gamepad.
Gamepad Joysticks Were Not in Neutral Position When Connected to Driver Station
The teams can connect up to two gamepads to the Driver Station Android device. Each gamepad has a pair of
joysticks that the team drivers can use to control their robot. The gamepads are usually connected directly to a
REV Driver Hub or through a non-powered USB hub to the USB Micro OTG port on an Android smartphone
Driver Station. When the gamepads are first connected to the Android device, the Android device calibrates the
zero or neutral position of the two analog joysticks on each gamepad.

60 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
If a user has deflected or moved the joysticks while they are being plugged into the Driver Station, the Driver
Station might use a non-zero position of the joysticks as the calibrated reference point. This can cause
unexpected behavior when an OpMode is run. For example, if the user starts the OpMode and the robot starts
driving without the user touching the joysticks, one possible cause could be an improperly calibrated joystick.
To clear this problem, stop the OpMode, disconnect the gamepads from the Driver Station, and then reconnect
the gamepads, making sure the joysticks are in their neutral position.
Mode Button on F310 Gamepad is Pressed
The Logitech F310 gamepads have a button on them labeled as “MODE”. When this button is pressed, the
little green LED next to the button should toggle on. Teams usually do NOT want to have this button enabled.
When the F310 gamepad has this MODE button enabled, the left-hand side controls change so that the
outputs of the left joystick and the D-pad are swapped. This often confuses teams if the MODE button gets
enabled during a match. If a team is experiencing weird behavior from their gamepads, verify that the MODE
button is not enabled. If it is enabled and the green LED is lit, push the MODE button again to disable this
function.
Figure 75 – There is a button marked “MODE” on the F310 gamepad controller.
Gamepad Disconnects While Joysticks are in a Non Neutral Position During an OpMode Run
If a team is running a driver-controlled OpMode, and one of the gamepads gets disconnected from the Driver
Station while the joystick of the gamepad was in a non-neutral position, the control system might remember the
last driver command. If the team stops the OpMode using the STOP button on the driver station, then
reconnects the gamepad to the Driver Station and runs the OpMode again, the OpMode might receive the
remembered, non-neutral gamepad input and cause the robot to move. To correct this situation, the user
should move the joysticks on the gamepad around briefly and then let them move back to their neutral
positions.
Driver Station Goes to Sleep While OpMode is Running
This problem will typically occur if the Sleep timer is set too low, and the Driver Station goes to sleep while an
OpMode is running. To address this issue, go to the phone’s Settings -> Display -> Sleep, and set it to sleep
after 10 or 30 minutes of inactivity.
Driver Station Powers Off Unexpectedly
This problem will occur when either Android device has a low battery. If the device is unexpectedly shutting off,
check that the device has an adequate battery charge state.
Unable to Find a Specific OpMode in the Driver Station’s List of Available OpModes
If the team used Android Studio and the FIRST Tech Challenge SDK to create an OpMode but they are
unable to find this OpMode on the FIRST Tech Challenge Driver Station’s list of available OpModes, then you
should ask the team if they remembered to register their OpMode in the FtcOpModeRegister class. If they
created the OpMode, but did not register it, then it will not be visible on the Driver Station.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 61
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Gamepad Left Joystick is Not Working
If a gamepad’s left joystick is not working and the right joystick is working, the probable cause is the “Mode”
button adjacent to the left joystick was activated. When the green light next to the Mode button is illuminated,
the gamepad swaps the functionality of the directional pad (D-pad) with the left joystick. Press and release the
Mode button to turn the light off and restore the functionality of the left joystick.
Robot Controller
User Code Threw an Uncaught Exception: null
This error occurs when a method is called on an object that is null at the time the method was called. To
address this issue, first look at the robot log file to find where to search for the problem. To access the log files,
open the settings in the Robot Controller app, and click “view logs.” Then, scroll up until a block of red text
appears, and look for the line that says
“com.qualcomm.ftcRobotcontroller.opmodes.YourOpmodeName.loop(YourOpmodeName.java:XX)”
The XX will have a line number where the null error occurred in the code, and is a good starting point to
addressing the issue. For example, if this line is accessing a method of an ElapsedTimer object, make sure
that the object has been instantiated with “objectname = new ElapsedTimer();” somewhere in the code before
this line.
User Code Threw an Uncaught Exception: number XXX is invalid;
This is an exception that is typically thrown when a motor or servo is set to a value that is less than -1 or
greater than 1. To find which line of code the exception was thrown on, check the robot logs by opening the
settings in the Robot Controller app, and clicking “View logs.” Then scroll up to the first block of text that is red,
and find the line that says:
“com.qualcomm.ftcRobotcontroller.opmodes.YourOpModeName.loop(YourOpModeName.java:XX)”
The XX will be the line number where the exception was thrown, and is a good starting point to addressing the
issue. Remember: the setPower method for DcMotors can only be passed a value from -1 to 1, and the
setPosition method for Servos can only be passed a value from 0 to 1. If this value is likely to be outside of the
range, the Range.clip() method can be used to constrain the value to a specified range.
Unable to find a hardware device with the name “…”
A very commonly encountered error occurs when the user tries to run a specific OpMode , and the FIRST
Tech Challenge Robot Controller app complains that the “User code threw an uncaught exception: Unable to
find a hardware device with the name “…”” where “…” is the name of the hardware device that the OpMode
is trying to access.
This error will occur if the OpMode specifies a name for a device that does not match the corresponding
name for the device in the FIRST Tech Challenge SDK’s hardware map. This error will occur for apps created
using Android Studio.
Figure 76 - The name used by the OpMode must match the name used in the configuration file for the device exactly.

62 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
If you are at an event and you encounter this error message, ask the team to verify that the name that they use
in their OpMode to reference a hardware device matches the name specified for that device in the
configuration file of their Robot Controller. The spelling is case sensitive so the names must match exactly.
Common Programming Errors
It can be difficult and frustrating trying to debug problems with a team’s OpMode . However, there are some
commonly encountered programming errors that can cause problems with a team’s OpMode .
Neglecting to Insert waitForStart() Statement
For a LinearOpMode object, it is important that the programmer included a waitForStart() statement in the
OpMode . Any statement in a LinearOpMode object that occurs after the waitForStart() statement will be
executed after the user touches the START arrow on the Driver Station. If the programmer forgot to
include a waitForStart() statement, the robot might behave unpredictably. For example, the robot might start
moving instantly as soon as the OpMode is selected.
Uninterruptible Threads
Teams often incorporate loops in their robots’ OpModes . Advanced programmers might also like to spawn
threads within their OpModes to execute commands in parallel to the main OpMode process. If an
OpMode contains a loop or spawns a separate thread, it is important that the loop or the thread is written
such that the loop or thread can be interrupted by the Java application when necessary.
This can be illustrated by an example. Suppose a team writes the following OpMode :
// turn on motors.
motorL.setPower(0.2);
motorR.setPower(0.2);
// use while loop to run the cycle indefinitely.
while(true) {
// stop if touch sensor is pressed..
if(sensorTouch.isPressed()) {
// stop OpMode .
motorL.setPower(0);
motorR.setPower(0);
break;
}
}
In this example, the motors are turned on, and then the OpMode loops indefinitely until the touch sensor is
pressed. This OpMode is “uninterruptible.” If the user presses the STOP button on the driver station before
the touch sensor is pressed, the while loop will continue to run and the OpMode will not be properly
stopped. This can cause weird and unresponsive behavior of the robot. In this case, the robot will continue to
run, and the Driver Station will continue to display the STOP button, even after the user has pressed the STOP
button.
The FTC Robot Controller app can detect potential “runaway” OpModes . If the app detects what it thinks is
a “runaway” or unresponsive OpMode , as a safety measure the app will record an error message in the log
file and then it will crash itself. Unfortunately, this is the only way to stop an unresponsive thread. The user can
check the robot controller to look for clues that their OpMode contains an infinite or uninterruptible loop.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 63
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 77 - If the app detects a potential unresponsive OpMode , it will log an error then abort itself.
The correct way to prevent a “runaway” or unresponsive OpMode is to use an interruptible method within
your loop or thread. The previous example could be made interruptible by using the opModeIsActive() method
as the loop condition, or by putting a sleep statement somewhere in the loop.
The following code would exit properly if the user touches the square STOP button on the Driver Station
before the touch sensor was pressed.
// turn on motors.
motorL.setPower(0.2);
motorR.setPower(0.2);
// use while loop to run the cycle indefinitely.
while(opModeIsActive()) {
// stop if touch sensor is pressed..
if(sensorTouch.isPressed()) {
// stop OpMode .
motorL.setPower(0);
motorR.setPower(0);
break;
}
}
REV Robotics Control and Expansion Hubs
The REV Expansion Hub is a compact hardware controller that has 4 DC motor ports, 6 servo ports and
multiple digital, I2C and analog ports. The REV Control Hub is a REV Expansion Hub with an integrated
Android device.
Detailed information and specifications on the Control and Expansion Hubs and their use can be found in the
REV Robotics Control Hub Getting Started Guide and REV Robotics Expansion Hub Getting Started Guide.
The Getting Started Guides are available on the REV Robotics website (see https://docs.revrobotics.com/duo-
control/).
This section contains important tips when troubleshooting a robot that is using a REV Robotics Control and/or
Expansion Hub.
Resetting a REV Control Hub WiFi Password
A common issue for teams is resetting the password for the REV Control Hub WiFi password to a new value
which is required as part of field inspection.
On the Driver Station app, go to the three dots (...) and select “Program and Manage”
Wait as it may take some time to load. (~30 seconds).
Follow steps from Updating a Control Hub - REV Hardware Client (revrobotics.com) to update:
• Select three lines in upper right-hand corner.

64 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
• Select “Manage” from the that pops up.
• Scroll-down to Wi-Fi Settings and enter new password twice in the input fields
• Make sure to write down the password somewhere for safekeeping.
• “Select “Apply Wi-Fi Settings”
• Unpair and re-pair the RC and DS.
Power Cycle Time
FIRST recommends that the teams power down the device for a minimum of 5 seconds before powering their
Control or Expansion Hub back on again.
Logic Level Converters
The REV Robotics Control and Expansion Hubs operate using 3.3V digital logic levels. The older Modern
Robotics-compatible sensors and encoders operate using 5V digital logic levels. If a team would like to use a
5V device that was compatible with the Modern Robotics hardware controllers, then the team will need to use a
Logic Level Converter (available from REV Robotics) to connect the 5V device to the 3.3V Control or
Expansion Hub ports.
5V Modern Robotics-Compatible Encoders
If a team has a 12V DC motor with a 5V encoder that is designed to connect to a Modern Robotics DC motor
controller, then the team will need one REV Robotics Logic Level Converter per 5V encoder to connect the
encoder to the Control or Expansion Hub.
5V Modern Robotics-Compatible I2C Sensors
If a team has a 5V, Modern Robotics-compatible I2C sensor, then the team will need a REV Robotics Logic
Level Converter plus a REV Robotics Sensor Cable Adapter to properly connect the 5V device to a Control or
Expansion Hub.
LED Blink Codes
The REV Control and Expansion Hub have the following blink codes.
Figure 78 - REV Hub - Blink Codes

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 65
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Note that the REV Robotics website maintains an up-to-date blink code chart (see
https://docs.revrobotics.com/duo-control/troubleshooting-the-control-system/led-blink-codes).
Troubleshooting Dual Expansion Hubs
Teams can daisy-chain two REV Robotics Expansion Hubs together to provide additional I/O ports for their
robot. Details on how to configure and troubleshoot a dual Expansion Hub robot are included in the REV
Robotics Expansion Hub Getting Started Guide. Details on how to configure and troubleshoot a dual
Expansion Hub robot can also be found in the following online documentation:
https://ftc-
docs.firstinspires.org/en/latest/hardware_and_software_configuration/configuring/configuring_dual_hubs/config
uring-dual-hubs.html
If a team is having a problem with a dual Expansion Hub configuration, it is important that the FTA or CSA
verify that each of the daisy-chained Expansion Hubs has a non-conflicting serial address. By default, all
Expansion Hubs are assigned an address of 2 at the factory. If a team wants to connect two Hubs together,
then the team must first change the serial address for one of the Hubs to prevent it from conflicting with the
other Hub’s address.
An FTA or CSA can connect each Expansion Hub individually (not daisy chained) to a Robot Controller and
verify the blink pattern for each Hub to determine the Hub’s address. Details on how to change the address of
an Expansion Hub are included in the online documentation listed above.
Useful Tips and Tricks
Use a Pair of Android Devices to Monitor Wi-Fi Channel
It is useful to have a set of Android devices that you can use to monitor the activity on a wireless network. You
can configure the FIRST Tech Challenge Robot Controller to have an empty configuration file (no devices
attached). Connect to the FIRST Tech Challenge Robot Controller app with the FIRST Tech Challenge Driver
Station app on the other Android device. Use the ping time feature as an indicator for the network quality on
the operating channel of the devices.
Use the Log Files to Help Troubleshoot Problems
Both the FIRST Tech Challenge Robot Controller and FIRST Tech Challenge Driver Station apps log
information that can be useful for diagnosing problems with the system. On the FIRST Tech Challenge Robot
Controller app, if you touch the three vertical dots in the upper right-hand corner of the main activity, you can
select the View logs option from the pop up menu that appears. This will display the log file information for the
FIRST Tech Challenge Robot Controller app.
You can also use the Android Debug Bridge (ADB) to pull the files from the Android devices to your local
computer. Details on how to use the ADB utility are available on the Android Developer website,
http://developer.android.com/tools/help/adb.html
On the Android device running the FTC Robot Controller app, the log file is stored at the device’s top level
(Main Storage) under this filename,
robotControllerLog.txt
On the Android device running the FTC Driver Station app, the log file is stored at the device’s top level (Main
Storage) under this filename,
driverStationLog.txt
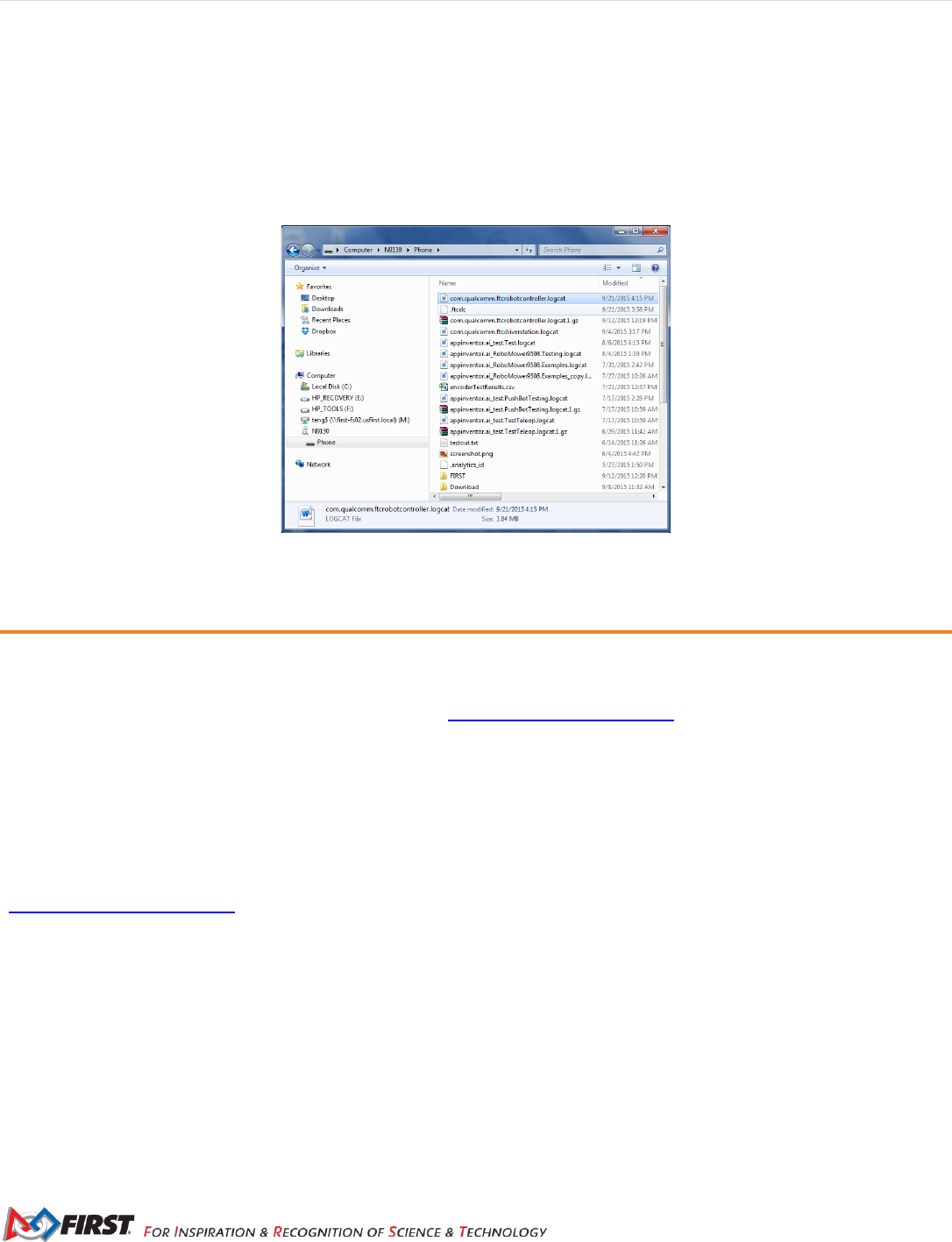
66 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
You can use the ADB utility to copy the file to your local computer. For example, the following command line
string will attempt to pull the Robot Controller log file from the phone to the current directory of the computer.
adb pull /robotControllerLog.txt .
For Windows users, you can also connect your Android device as a media device, and use the Windows File
Explorer to browse and find the log file.
Figure 79 - Windows users can use the File Explorer to locate and copy the log file.
Wireshark
This section contains a couple of limited examples on how to use Wireshark to look for specific wireless issues.
Detailed information on how to use Wireshark is beyond the scope of this document. For detailed Wireshark
documentation, please visit the following web page: https://www.wireshark.org/
Creating a Capture Filter for DEAUTH Packets
In this section, we demonstrate how to create a Wireshark capture filter to capture deauthentication (DEAUTH)
packets on a wireless channel. It is possible for a person to spoof (i.e., masquerade as) the MAC address of a
device to disrupt the wireless communication with that device. If you have access to a machine with Wireshark,
then you can use it to look for DEAUTH packets in your vicinity.
You can download the most current released copy of the software through the Wireshark website
(https://www.wireshark.org/). Install the Wireshark software per the instructions (refer to the Wireshark website
for documentation).
To use Wireshark to examine wireless data, you need to have a device that supports monitor mode operation
of the wireless adapter. If you have a Mac computer running a recent version of macOS, you should be able to
use the Mac’s built in wireless adapter in monitor mode. For Linux devices, you need to consult the Wireshark
and Linux documentation to figure out if your Linux computer will support monitor mode operation.
Once you have Wireshark properly installed and you have verified that you can run your wireless adapter in
monitor mode, you should launch Wireshark. Note that some configurations require that you run Wireshark as
a super user. If you have a configuration that requires super user status to run properly, it is possible to modify
the permissions for your Wireshark installation so that you will no longer need to be a super user to run it.
Please consult the official Wireshark documentation for details on how to do this.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 67
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
The following screen shot shows the Wireshark user interface (version 1.10.2, Linux)
Figure 80 –Wireshark user interface.
Click on the Capture → Options menu (or press the button that looks like a small gear, which is second from
the left on the button bar). The following image is a screen shot of the Capture → Options menu:
Figure 81 - Make sure you select the adapter that is running in monitor mode.
Make sure that the wireless adapter which is running in monitor mode is selected as the capture interface. In
the screenshot above, the adapter “mon0” is the device that is running in monitor mode. Note for Mac users,
you can double click on the wireless adapter in the list and check the Capture packets in monitor mode to
place the selected adapter into monitor mode.

68 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 82 - Mac users can select the Capture packets in monitor mode option.
In the Wireshark: Capture Options window, there should be a text box next to a button called “Capture Filter.”
You want to specify your capture filter in this text box. The capture filter will filter only a limited number of
packets that match the filter criteria for your Wireshark capture session. In this case, you want to specify the
filter as “type mgt subtype deauth” (you do not type in the quotation marks... just provide the text). If the syntax
for your capture filter is correct, the background color of the text box should turn green.
Figure 83 - Specify the capture filter "type mgt subtype deauth" in the text box.
When you are ready to start your capture, simply hit the Start button. If the capture filter is applied properly, the
Wireshark panel will display any packet of type mgt and subtype deauth. The following image shows some
DEAUTH packets, which were captured by Wireshark:
Figure 84 - DEAUTH packets captured by Wireshark.
You can run this capture (with the filter applied) during a FIRST Tech Challenge event and it will only display
the DEAUTH packets. It is normal for DEAUTH packets to occur, but if you see several DEAUTH packets in a
row for a specific time during an event , it might indicate an intentional DEAUTH attack occurred.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 69
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Note that DEAUTH packets occur normally and a Wireshark capture might contain several normal (non-
malicious) DEAUTH packets. If you are at an event and suspect that a DEAUTH attack might have occurred,
you should note the approximate time of the attack as well as the team numbers of the robots on the field. You
can use Wireshark to check if any DEAUTH packets were captured around the time of the suspected attack.
You can also cross reference the source address of the DEAUTH packet to see if it matches any of the
addresses of the robots that lost wireless connectivity on the field. During a DEAUTH attack, a hacker will
spoof the MAC address of the target robot controller and pretend to be that robot controller and send DEAUTH
packets to any devices (i.e., the Driver Station) that are connected to the robot controller’s wireless network.
To stop the capture, you can press the red square icon to stop the capture. You can use the File→ Save menu
item to save the data to the hard drive.
Also, you can use the Statistics → Summary menu item to get some basic statistics about the capture data.
Remember if you applied the DEAUTH capture filter, then only DEAUTH packets will have been captured by
Wireshark. The following image shows the Statistics → Summary menu. In this example, 103 DEAUTH
packets were captured during the session.
Figure 85 - 103 packets were captured in this example.
Viewing WLAN Traffic Statistics
You can use Wireshark to view Wi-Fi statistics for your captured data. If you disable any existing capture filters
(to make sure that you capture all available data), and run Wireshark in monitor mode, you can capture and
quickly review the data to get some basic information about your wireless environment. If you have captured
wireless data in monitor mode, you can select Wireless -> WLAN Traffic from Wireshark’s menu to view
some statistics about the captured data.

70 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 86 – The WLAN Traffic screen provides useful statistics about the captured data.
In the example shown in Figure 86 above the captured data is sorted by SSID. If you look closely at the data,
you see that the network called “DIRECT-aP-WIFI-A-RC” has a BSSID or MAC address of 68:c4:4d:3d:32:1e
which is also the MAC address of the “Base station” (i.e., the Robot Controller).
Looking at the data, you can see that 34.3% of the captured data is associated with this wireless network. If
you expand the data for this network, you can review statistics for each device that is associated with this
network.
The WLAN Traffic view is useful because you can use it to troubleshoot issues with your wireless network. If
your Wireshark capture file shows that one of the devices has a high number of retries (whether it is a Robot
Controller or a Driver Station) then you can check to see if there is something that is having a negative effect
on the device’s radio performance. You can also check to see if other devices on the same channel are having
similar issues.
You can also look at the WLAN Traffic view to try and determine who is putting out the most data on the
channel. This could be helpful if you are trying to identify sources of Wi-Fi traffic on a wireless channel.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 71
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Getting Additional Help
If you have questions about the FIRST Tech Challenge Control System, you can visit the FIRST Tech
Challenge forum and search for related posts or post your own questions: https://ftc-
community.firstinspires.org/
There is also a FIRST Tech Challenge forum reserved for FIRST Tech Challenge technical volunteers (FTAs,
CSAs, and WTAs) where these volunteers can ask questions and exchange information with other volunteers
and with FIRST Tech Challenge staff. Prior to an event, FIRST Tech Challenge technical volunteers should
visit this forum to get any last-minute information from other volunteers and from FIRST regarding event
support and technical troubleshooting tips.
The FTA/CSA/WTA forum is here: https://ftc-community.firstinspires.org/c/events/fta-csa-wta-technical
Tech Tips on Using Log Files
Introduction
One of the most useful features in the troubleshooting process is to have the ability to retrieve and access the
log files on the Driver Station and Robot Controller devices. The system logs all types of info in these files and
when an incident occurs, it is often helpful to review these files to see if we can notice any pattern or clues that
can help diagnose the problem.
Helpful Tip: If you are on a Windows machine, the REV Hardware Client can be used to view and download log
files from the Robot Controller Android device. See the REV Hardware Client Documentation here:
https://docs.revrobotics.com/rev-hardware-client/
Verify the Date and Time
One important and often overlooked step that you can take to help with your troubleshooting is to verify the
date and time on your Android devices. Ideally, you would like to verify that the dates and times on your
devices match the local date and time. When the FIRST Tech Challenge apps record statements to the log file
they include a timestamp that you can refer to when you are trying to troubleshoot a specific event.
When a problem with the robot occurs, you might not have the opportunity to view the log files and
troubleshoot the problems right away. If you note the date and time of the incident, then at a later opportunity
you can check the log files and read the timestamps to look for statements that occurred around the time of
your incident.
The FIRST Tech Challenge Log Files
The logcat files are accessible on your phones. By default, the FTC Robot Controller and the FTC Driver
Station apps store these files (as text files) in the top-level directory on your Android device. For the FTC Robot
Controller app, if you are using Android Studio to write your app, the path on your phone to the log file is as
follows,
/sdcard/ftcRobotControllerLog.txt
Note that this file path name is different than previous versions of the name (it used to be
/sdcard/com.qualcomm.ftcrobotcontroller.logcat).
For the FIRST Tech Challenge Driver Station app, the path to the log file is as follows,
/sdcard/ftcDriverStationLog.txt

72 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Note that this file path name is different than previous versions of the name (it used to be
/sdcard/com.qualcomm.ftcdriverstation.logcat).
Viewing the FIRST Tech Challenge Robot Controller Log File
You can use the FTC Robot Controller app to browse log file information on the phone. From the main FTC
Robot Controller screen, click on the three dots to bring up the main menu:
Figure 87 – Click on the three dots in the upper right hand portion of the screen then select View logs from the menu.
Select the View logs item from the menu to display the log file:
Figure 88 – You can scroll up and down to view the statements in the log file.
Scroll up and down to view the log statements. The oldest statements appear at the top and the most recent
statements appear at the bottom. Error messages are displayed in red.
Note that the View log feature only shows you an abbreviated version of the log file. While this is useful, it is
sometimes more helpful if you can view the entire log file and search for older statements which might not be

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 73
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
available through the View log feature. The subsequent sections of this manual contain instructions on how to
grab the log file from the phone onto a computer.
Finding the Log Files
File Navigation
Each FTC app stores log files at the top level of its Android device’s storage system. Using the device’s file
manager app (if any), look inside Main Storage. The FTC Robot Controller app creates files named
robotControllerLog.txt, sometimes with a digit appended. Similarly, the FTC Driver Station app creates files
named driverStationLog.txt.
Third-party file manager apps can also be found at the Google Play store; many are free and perform well.
For some FTC Android phones, the only pre-installed file navigation tool is found inside a menu (not displayed
on the Apps screen). Open the phone’s Settings, then select Storage. Scroll to the bottom of the list, and touch
Explore. This opens a basic file navigation screen, typically at the Main Storage level. Scroll down to see the
FTC log files. Touch and hold a filename to activate a file management menu at the top of the screen. Or
briefly touch a filename to open it with a selected text viewing app, if any.
Besides the standard full logs, the FTC Robot Controller app can also create shorter Match Logs. These are
found in the FIRST folder, in the subfolder called matchlogs. Note: the FIRST folder contains robot
configuration (XML) files and other useful subfolders, beyond the scope of this troubleshooting guide.
The Android phone may have a pre-installed or third-party app for viewing text files in various formats. But
these FTC log files are large, each text line is long, and the phone’s screen is small. It is usually easier to copy
these files to your PC and use an application on the PC to browse the file.
Using Windows File Explorer to Locate the Log Files
If you are a Windows user you can use the Windows File Explorer to browse the contents of your Android
phone and find the log files. The first thing you should do is connect the phone via a USB cable to your
Windows machine.
Once the phone is connected, you want to make sure the phone is in media device mode rather than charging-
only mode. For most FTC phones, swipe down from the top edge of the screen, and select “use USB to
transfer files.”
Figure 89 - Make sure your phone is in Media device mode.

74 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
If the phone is in Media device mode you can launch the Windows File Explorer to browse the contents of the
phone. The phone should appear as a media device (e.g., “Moto E (4)”) connected to your PC:
Figure 90 –The phone should appear as a media device connected to your PC.
You can double click on the phone’s hard drive to open and browse the main directory of the phone.
Figure 91 – You can browse the main directory of the phone.
When you open the phone’s “hard drive” you are exploring the top level or Main Storage directory of your
Android device. You can see that there is a FIRST subdirectory in this main directory. You can also scroll down
to the bottom of the window to find the log files:

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 75
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 92 – The log files should be visible in this directory. With Windows File Explorer you can copy one or more log files and then
paste the file onto your own PC’s hard drive. This allows you to create a local copy of the log file on your computer that you can browse.
Figure 93 – You can make a copy of a log file by dragging and dropping the file to your personal computer.
Viewing the Contents of the Log File
Once you have successfully copied the log file to your local computer, you can use an application on your
computer to open and read the file. The log file is simply a text file and you might be tempted to open the file
using an application like Windows Notepad. If you do try and use Notepad, you might find that the formatting of
the displayed text is not useful:

76 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 94 – Using Notepad might not be as useful to browse the log files.
If you are a Windows user, then you can use Microsoft Word to open and view the file. When you attempt to
find the file, you need to make sure that the file type filter in the Open file dialog box is set to “All Files” when
you try to find your log file.
Figure 95 – Make sure the file filter is set to “All Files” when you browse to find your log file.
Using Microsoft Word to view the log file makes it easier to read and search for text in a log file. A useful
alternative is Notepad++.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 77
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 96 – Using Microsoft Word to view the log file makes it easier to read the contents and search for specific text strings.
Non-Windows Users
If you are a user who has a Mac or Linux computer, you do not have access to the File Explorer application to
copy and paste files from the phone. Mac users have the option of use the Android File Transfer program to
browse and copy files from the phone:
https://www.android.com/filetransfer/
Mac, Linux, and Windows users also have the option of using the Android Debug Bridge utility to transfer files
from the phone to their local computer. We will examine the Android Debug Bridge program in the next section
of this document.
Using the REV Hardware Client Windows App to View Log Files
A convenient and easy way to troubleshoot problems with the REV Control system is to view log files using the
REV Hardware Client for Windows computers. The REV Hardware Client log viewer has filters, tags, and a
search function that makes it easy to see what is happening on the Control Hub or Driver Hub during an
OpMode run. Instructions for using the REV Hardware Client are available on the REV Robotics website:
https://docs.revrobotics.com/rev-hardware-client/control-hub/using-the-log-viewer
Using the Android Debug Bridge for Troubleshooting
The Android Debug Bridge (ADB) is a utility program that is included with the Android Software Development
Kit (SDK) platform tools. ADB is a program that you can invoke from a command line. It is a very helpful utility.
To use the ADB utility you will need to have the Android SDK platform-tools installed (preferably a recent
version of the Android SDK). Note that normally when you install Android Studio, you also install the Android
SDK including the platform tools package.
The examples in this section were made with a Windows PC but the process is similar for Mac and Linux
computers. If your computer does not recognize the command “adb” then you should check to make sure that
the Android SDK platform-tools are installed in your machine. You should also check that the file path to the
adb utility program is included in the command line search path (refer to the appropriate Windows, Mac, or
Linux documentation for details on how to check this).

78 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
“Shelling” into an Android Device
You can use ADB to “shell” into an Android device. This means that you can use ADB to establish a terminal
session with an Android device. The ADB shell provides a command line interface that you can use to type
commands to interact with the phone.
To launch an ADB shell, you need to first make sure that USB debugging is enabled for your Android phone
and that you have the appropriate driver installed on your computer. Connect the phone to the computer with a
USB cable. Open a command line window or a terminal window on your computer and type in “adb devices” at
the prompt. This command will list all available Android devices that are currently connected to your computer:
Figure 97 – From a terminal or command line interface type “adb devices” to see a listing of attached Android devices.
If you want to establish a terminal or shell session with your Android phone, simply type “adb shell” at the
command prompt:
Figure 98 – Type in “adb shell” to create a terminal session with your Android device.
If you look at Figure 98 you see that the command line prompt changes to “shell@speed:/ $” after the words
“adb shell” were entered. This new command line prompt indicates that the user is now connected to the
phone and any commands that are entered will be processed by the phone. Note that Linux commands are
case sensitive.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 79
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
You can use standard Linux commands to navigate the environment. If you type “pwd” at the shell prompt, the
phone will print the current directory on the screen:
Figure 99 – The command “pwd” prints the current working directory.
If you type “cd /sdcard” the phone will change the current directory to the /sdcard subdirectory on its file
system. If you then type in “pwd” (after you have changed directories) you will see your new location within the
file system:
Figure 100 – Entering in “cd /sdcard” will change the working directory. Entering in “pwd” will print the new working directory.
If you type “ls” at the command prompt the phone will list the contents of the current directory. If you look at the
directories and files, you will see that they match the folders and files that you saw using the Android device’s
File Manager app, or that you would see using the Windows File Explorer application:

80 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Figure 101 – The command “ls” will list the folders and files in the current directory.
To exit the ADB shell and return to your personal computer’s command prompt simply type in the command
“exit”:
Figure 102 – The command “exit” will exit you from the phone’s shell and return you to your computer’s command line.
Pulling a File from the Android Device
You can also use the ADB utility program to pull a file from the phone to the local file system of your computer.
The syntax is “adb pull <SOURCE PATH> <DESTINATION PATH>” where “<SOURCEPATH>” is where on
the phone the original file is located and “<DESTINATION PATH>” is where on the computer you want to copy
the file to.
For example, if you type in the following command at a user prompt,
adb pull /sdcard/com.qualcomm.ftcRobotcontroller.logcat c:\users\TEInspiron\Desktop\rc_log.txt
then the ADB utility will attempt to copy the log file from the Android device and to the local file system
(c:\users\TEInspiron\Desktop\rc_log.txt).

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 81
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Figure 103 – You can use the “adb pull” command to copy a file from the phone onto your local hard drive.
Once you have copied the file to your local hard drive, you can use an appropriate application to view the log
file.
Using Android Studio to View Log Messages
You can also use Android studio to view log messages from your phone. If your phone is connected either
through a USB cable or via wireless ADB11F
11
you can view the log messages using the Android Monitor window
within Android Studio. Detailed instructions on how to access the Android Monitor feature are available on the
Android Developer website:
https://developer.android.com/tools/debugging/debugging-studio.html
Note that the amount of log statements that appear in the window can be overwhelming. It is possible to create
filters to show only a subset of data in the logcat window of Android Studio (refer to the Android Developer
website for details on how to do this).
Figure 104 – You can view (and filter) logcat statements through Android Studio.
11
Refer to http://developer.android.com/tools/help/adb.html#wireless to see information about how to use ADB wirelessly.

82 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Creating Your Own Log Statements within an OpMode
It is possible (and often helpful) to insert your own log statements within an OpMode for debug purposes. The
FIRST Tech Challenge SDK contains a class called DbgLog that has two static methods that can be used to
log messages to the log file:
DbgLog.err(String message)
DbgLog.msg(String message)
These two messages can be used to create log statements in your log file. The err method will create an error
message (which has a different level of severity and can be used to filter statements when viewing logcat
output) and the msg method will create ordinary messages in the log file.
You can embed these methods within your OpMode and use them to debug the statements in real time using
the Android Monitor. You can also look for your statements in the log file.
Example OpMode
The following text is an example OpMode that shows how to use the RobotLog class to embed log statements
within your OpMode. Note that the DbgLog class was removed in version 3.3 of the FTC software (not
deprecated, but removed). The RobotLog.d() method will print equivalent debug messages to the log file of the
Robot Controller:
package org.firstinspires.ftc.teamcode;
import com.qualcomm.robotcore.eventloop.opmode.Autonomous;
import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode;
import com.qualcomm.robotcore.util.RobotLog;
/**
* Created by tom on 10/3/17.
*/
@Autonomous
public class MyLogDemo extends LinearOpMode {
@Override
public void runOpMode() throws InterruptedException {
RobotLog.d("TIE - entered runOpMode()");
double dStart = getRuntime();
double dCurrent, dElapsed = 0;
RobotLog.d(String.format("TIE - dStart = %.03f", dStart));
RobotLog.d("TIE - about to wait for start...");
waitForStart();
while(opModeIsActive()) {
dCurrent = getRuntime();
dElapsed = dCurrent - dStart;
telemetry.addData("1. elapse", String.format("%.03f",dElapsed));
RobotLog.d(String.format("TIE - dElapsed = %.03f", dElapsed));
this.sleep(250);
}
}
}
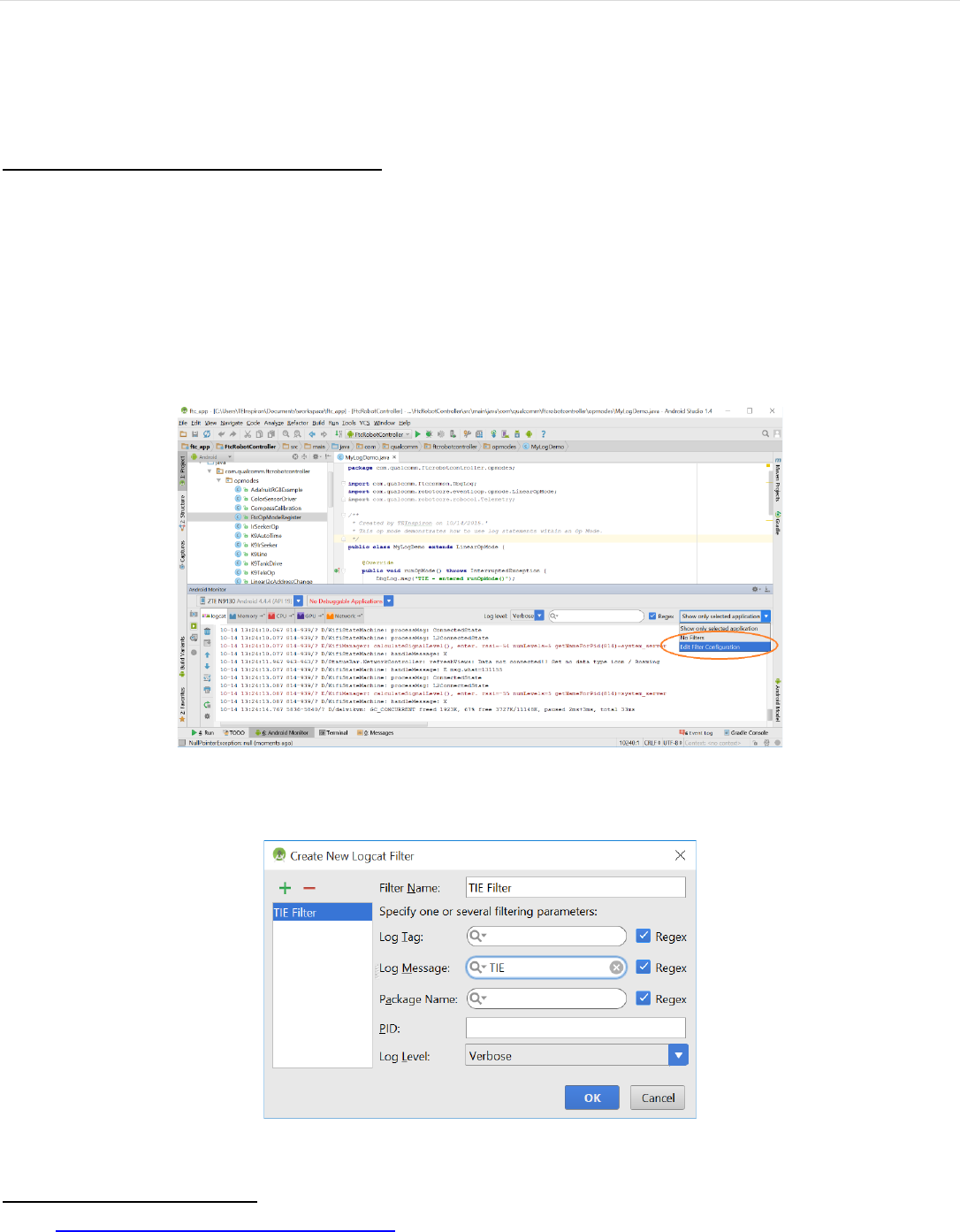
FIRST
®
Tech Challenge CSA Troubleshooting Manual | 83
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
This linear OpMode example shows how to use the RobotLog.d method to log information in the log file. You
can use the Android Monitor window of the Android Studio IDE to view these log messages in real time. You
can also create a filter so you only see a subset of log messages in the window.
Creating a logcat Filter in Android Studio
It is often desirable to filter out unwanted logcat statements when you are debugging. In the example OpMode
listed in the section above, the log statements have the expression “TIE” in them (the author’s initials). You can
create a filter that will display only log statements that contain this string.
In the right-hand side of the Android Monitor window use the drop-down selector to select Edit Filter
Configuration to create a new filter (see Figure 105). The Create New Logcat Filter window should appear
(see Figure 106). In the Create New Logcat window you can specify a new name for your filter (for example
“TIE Filter”). You can also specify a regular expression.
12
that is used to filter statements. In Figure 106, the
expression “TIE” is used as a filter for the log message. This means that the Android Monitor window will only
display log statements that include the expression “TIE” in the body of the message.
Figure 105 – Select Edit Filter Configuration to create a new filter
Figure 106 – Specify the Filter Name and a regular expression that you want to use for your filter (in this case “TIE”).
12
Visit https://en.wikipedia.org/wiki/Regular_expression for more information about regular expressions.
84 | FIRST
®
Tech Challenge CSA Troubleshooting Manual
Revision 1: 01.19.24
Once you have created your filter, the Android Monitor window should automatically filter out messages that do
not match the search criteria. You should see the filter statements in the window. If your OpMode is currently
running, you can see them in real time.
Figure 107 – If the OpMode running you can see your log statements in real time with a USB or wireless ADB connection.

FIRST
®
Tech Challenge CSA Troubleshooting Manual | 85
Gracious Professionalism
®
- “Doing your best work while treating others with respect and kindness - It’s what makes FIRST, first.”
Appendix A – Resources
Game Forum Q&A
https://ftc-qa.firstinspires.org/
Anyone may view questions and answers within the FIRST
®
Tech Challenge game Q&A forum without a
password. To submit a new question, you must have a unique Q&A system username and password for your
team.
Volunteer Forum
FIRST Tech Challenge Community (firstinspires.org) Volunteers can request access to role specific
volunteer forums by emailing FTCTrainingSupport@firstinspires.org. You will receive access to the forum thread
specific to your role.
FIRST Tech Challenge Game Manuals
Part 1 and 2 - https://www.firstinspires.org/resource-library/ftc/game-and-season-info
FIRST Headquarters Pre-Event Support
Phone: 603-666-3906
Mon – Fri
8:30am – 5:00pm Eastern Time
Email: Firsttechchal[email protected]
FIRST Tech Challenge Event On-Call Support
The on-call event support number is available for event personnel only. Please do not call these numbers if you are a
team looking for a ruling, a decision, or assistance. We trust that you will not misuse this resource.
Scoring System and Robot Control System on call event support: 603-206-2450
All other day of event support: 603-206-2412
FIRST Websites
FIRST homepage – www.firstinspires.org
FIRST Tech Challenge Page – For everything FIRST Tech Challenge.
FIRST Tech Challenge Volunteer Resources – To access public volunteer manuals.
FIRST Tech Challenge Event Schedule – Find FIRST Tech Challenge events in your area.
FIRST Tech Challenge Social Media
FIRST Tech Challenge X- If you are on Twitter, follow the FIRST Tech Challenge X feed for news updates.
FIRST Tech Challenge Facebook page - If you are on Facebook, follow the FIRST Tech Challenge page for news
updates.
FIRST Tech Challenge YouTube Channel – Contains training videos, game animations, news clips, and more.
FIRST Tech Challenge Blog – Weekly articles for the FIRST Tech Challenge community, including outstanding
volunteer recognition!
FIRST Tech Challenge Team Email Blasts – contain the most recent FIRST Tech Challenge news for teams.
Feedback
We strive to create support materials that are the best they can be. If you have feedback about this manual, please email
firsttechchallenge@firstinspires.org. Thank you!

.svg)){kind=link}
{kind=link}